Изобретение относится к электротехнике и может найти применение в системах автоматического управления, например в электроприводах постоянного тока главного движения металлорежущих станков.
Известен способ зависимого двухзбнНого управления электроприводом постоянного тока, заключающийся в изменении напряжения якоря двигателя при регулировании скорости ниже номи нальной и ослаблении потока возбуждения при регулировании скорости выше номинальной l.
Недостатком такого способа зависимого управления электроприводом постоянного тока является невысокое быстродействие управляемого привода. Наиболее близким к предлагаемому является способ зависимого двухзонного управления электроприводом пойтоянного тока, содержащим регулятор возбуждения с зоной нечувствительности, согласно которому сравнивают заданное значение скорости двигателя с ее действительным значением, полученную разность после преобразования сравнивают с действительным значением тока якоря ив функции полученной разности напряжений изменяют напряжение на якоре двигателя в зоне регулирования скорости ниже номинальной, а так же ослабляют поток двигателя в зоне регулирования скорости выше номинальной 2.
Однако известный способ не обеспечивает форсированный переходный процесс скорости до заданной величины, превышающей номинальную, так как начиная с номинальной скорости увеличение скорости происходит при ослабевающем потоке. Так как величина тока якоря ограничена, переход на скорость, превыиакщую номинальную, прей сходит при уменьшаквдемся моменте двигателя.
Целью изобретения является повышение быстродействия электропривода.
Поставленная цель достигается тем что согласно способу зависимого двухзонного управления электроприводом постоянного тока, содержащим регул ятор возбуждения с зоной нечувствительности, сраннивают заданное значение скорости двигателя с ее действительным значением, полученную разност после преобразования сравнивают с действительным значением тока якоря и в функции полученной разности напряжений изменяют напряжение на якоре двигателя в зоне регулирования скорости ниже номинальной, а также ослабляют поток двигателя в зоне регулирования скорости выше номинальной, дополнительно определяют режим работы электропривода по соответствию знаков действительных значений тока якоря и скорости двигателя и изменяют зону нечувствительности р гулятора возбуждения в функции действительного значения тока якоря, причем в пусковых режимах при превышении током якоря значения, соответствующего величине тока якоря в установившемся режиме, увеличивают величину зоны нечувствительности, а в тормозных режимах при тех же значениях тока якоря величину зоны нечувствительности уменьшают.
На чертеже изображено устройство, реализующее способ.
Устройство содержит последовательно соединенные блок 1 сравнения, преобразователь 2 якорной цепи, двигатель 3 с обмоткой независимого возбуждения .
На валу двигателя установлен тахогенератор 4, выход которого соединен с входом блока 1 сравнения. К входу преобразователя 2 якорной цепи подключен датчик 5 тока якоря. Цепь возбуждения двигателя содержит последовательно соединенные датчик 6 модуля ЭДС, регулятор 7 возбуждения и преобразователь 8 возбуждения.
Регулятор 9 зоны нечувствительности содержит блок 10 определения режима работы, входы которого соединены с выходами тахогенератора 4 и датчика 5 тока якоря, блок 11 выделения модуля тока, вход которого соединен с выходом датчика 5 тока якоря, блок 12 умножения, входы которого соединены с выходами блоков 11 и 12 соответственно выделения модуля тока и умножения, а выход - с нелинейным пороговым элементом 13. Характеристика нелинейного элемента такова, что при одном знаке входного сигнала выходной сигнал увеличивается скачком по отношению к первоначальному уровню, а при другом - так же уменьшается при достижении определенного значения входного сигнала, причем начальный уро- вёнь выходного напряжения соответствует величине нокинальной зоны нечувствительности регулятора возбуждения.
Устройство работает следующим образом.
Регулирование скорости до номинального значения ведут, изменяя выходное напряжение преобразователя 2 якорной цепи при постоянном номинальном потоке возбуждения. Регулирование скорости выше номинального значения веду.т, уменьшая выходное напряжение преобразователя 8 возбуждения, а следовательно, и потока возбуждения. Момент ослабления потока опред1еляется превышенным сигналом пропорциональных ЭДС двигателя, поступающего с выхода датчика б модуля ЭДС, зоны нечувствительности регулятора возбуждения 7, пропорциональной номинальной ЭДС двигателя. При ПОМОЩИ порогового элемента 13 регулятора 9 зоны нечувствительности определяют момент превышения током якорм з.аданйсй величины, в который в зависимости от режима: разгон или торможение, регулятор 9, подключенныя к второму входу регулятора 7 возбуждения-, изменяет его зону нечувствительности, а следовательно, и величину подцержив.аемой во второй зоне ЭДС двигателя 3 до окончания процесса разгона или торможения. В исходном состоянии, cxevu, когда входной сигнал электропривода равен нулю, ток якоря и скорость двигателя равны нулю, регулятор 9 зоны нечувствительности не меняет зону нечувствительности регулятора 7 возбуждения, которая соответствует номинальной ЭДС двигателя. Регулятор 9 зовы нечувствительноети определяет наличие одинаковой полярности сигналов скорости и тока (что имеет место при разгоне7, поступающих соответственно с выходов тахогенератора 4 и датчика 5 тока якоря. и уменьшает зону нечувствительности регулятора 7 возбуждения до величины, обеспечиваю1чей максимально возмЬ кньй ток и момент двигателя в зоне работы со скоростью выше йоминальной. При торможении величина тЬка якоря превьаиает порог срабатывания регулятора 9 нечувствительности, соответствумций заданной величине тока, и регулятор 9 зоны нечувствительности определяет нгшичие, различной по- лярности сигналов скорости и тока |( что соответствует режиму торможения ;и увеличивает зону, нечувствительности регулятора 7 возбуждения до величины,. соответствующей максимгшьно возможной ЭДС двигателя, обеспечивающей торможение с более полным потоком ,и, следовательно, с более высоким моментом. При уменьшении тока якоря ниже заданной величины, что свидетельствует об окончании переходного процесса, регулятор 8 зоны нечувствительности изменяет величину зоны нечувствительности до значения, соответствукнцего . номинальной ЭДС двигателя.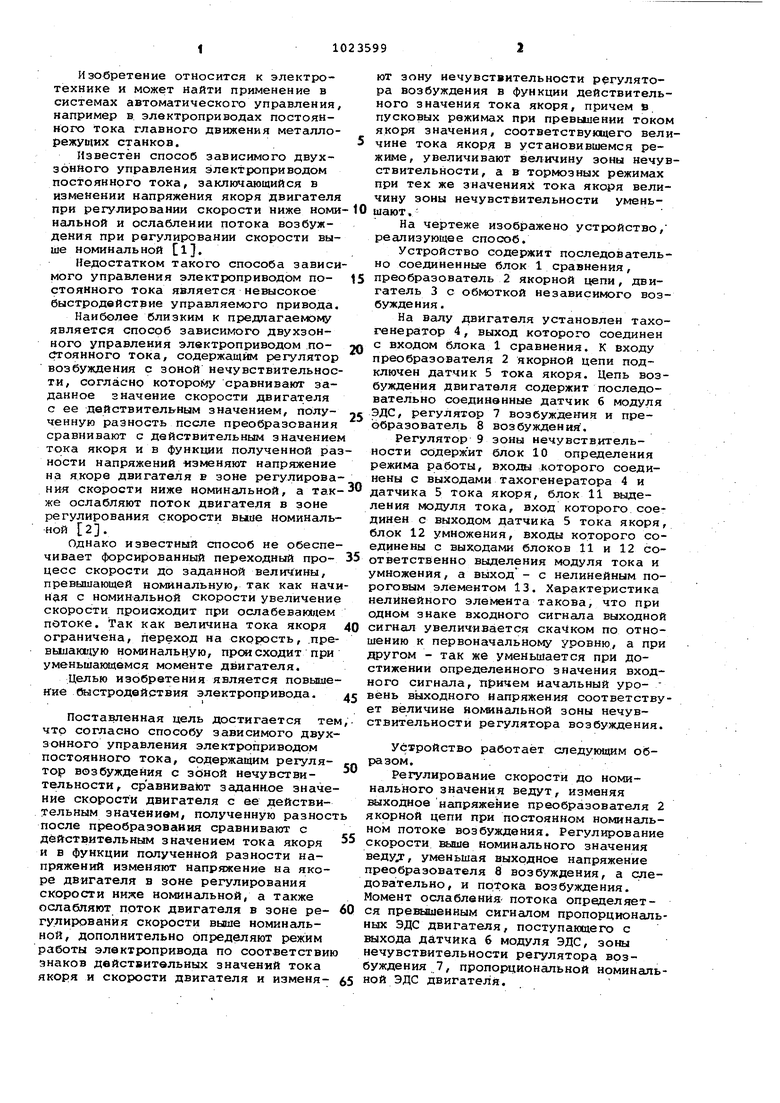
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Многодвигательный электропривод | 1979 |
|
SU851720A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1975 |
|
SU752711A1 |
| Двухзонный электропривод постоянного тока | 1979 |
|
SU836747A1 |
| Способ двухзонного регулирования частоты вращения электродвигателя постоянного тока и устройство для его осуществления | 1981 |
|
SU995248A1 |
| Электропривод постоянного тока | 1980 |
|
SU924814A1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1996 |
|
RU2095931C1 |
| Устройство для управления механизмом экскаватора | 1978 |
|
SU773212A1 |
СПОСОБ ЗДШСИМОГрДВУХЗОЯНОРО УПРАВЛЕНИЙ ЭЛЕКТВОПРИВОДОМ ПОСТОЯШОГО ТОКА, содержаишм регулятор возбуждения с зоной нечувстгвйтель нести рог- , jiaicHo которому сравнивают заданное значение скорости двигателя с ее дей{ствительиым значением, полученную разность после преобразования сравнивают с действительным:значением тока и: в фу ккции получеииой разности иапряясения изменяют напряжение, на якоре двигателя в зоне регулирования скорости н«1же номякаяьиойг, а также ослабляют поток двигателя в зон.е регулиров ай и я скорости вьхпе ио инг1льной, о т л и Ч а ю « и и с я тем, что, с целыо повышения Оыстродействия, дополнительно определяют режим работал электропривода по соответствию знаков действител1 ик1х зкачеинй тока якоря и скорости двигателя и «.змеияют зону нечу BCTii ЦТ ел ьиооти регулятора возбуж: дения в фун.кц11И действительного зиа- щ чения тока якоря,, причем в nycKOBiix .режима х при превышении током якоря значения, .соОтветствукедего величине тока якоря в установищиемсяфежиме, . увеличива1дт величину зоиы нечувствительности , а в тормозных режимахпри Тех же значениях тока якоря « велич 1.ну зоны нечувствительности умены-чакпг.