Предметом изобретения является электрический многодвигательный привод машин агрегата, связанных между собою тканью или иным гибким материалом через петлеобразователь и получающих вращение от асинхронных электродвигателей с короъкозамкнутым ротором и вращающимся статором, приводимым от серводвигателя.
Предлагаемый привод по сравнению с известным аналогичным приводом позволяет автоматизировать процесс компенсации возможных рассогласований линейных скоростей движения ткани между машинами, что достигается использованием для включения серводвигателя путевых контактов, управляемых кареткой петлеобразователя.
Для предупреждения самопроизвольного вращения статора приводного двигателя в режиме нормальной работы статор соединен с серводвигателем через самотормозящийся червячный редуктор.
На фиг. 1 изображена -в трех проекциях схема установки электродвигателя с вращающимся статором;
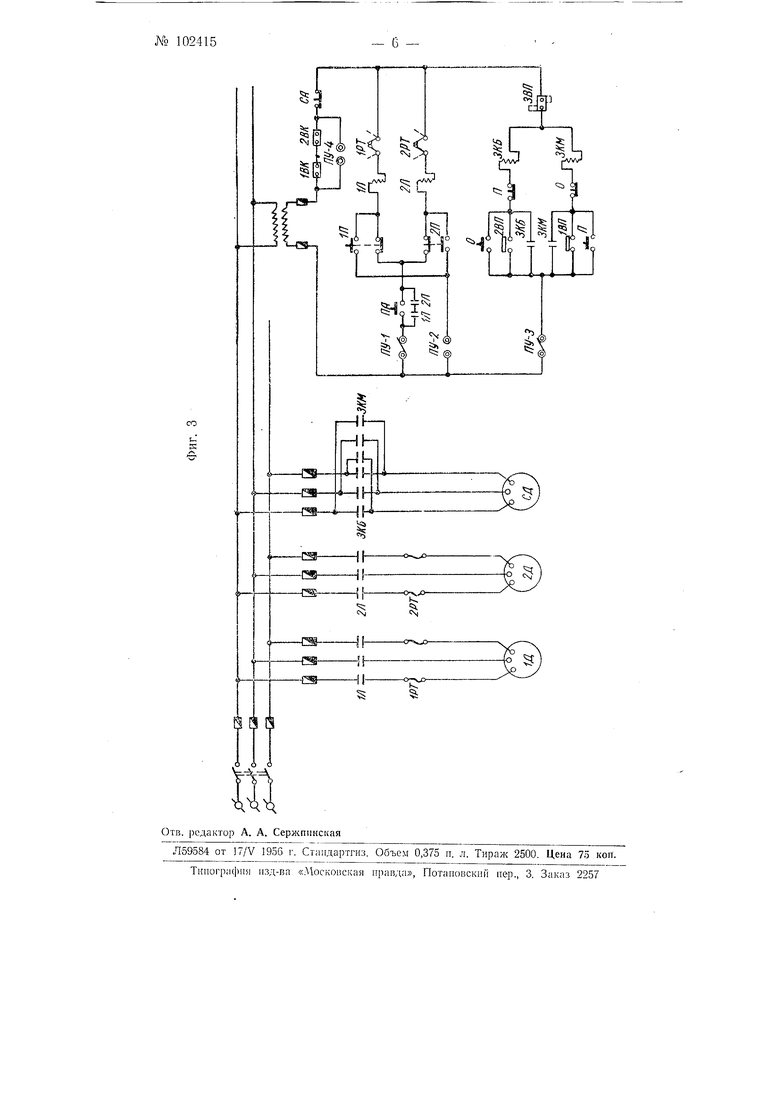
на фиг. 2 - технологическая схема агрегата из двзх машин; на фиг. 3- общая схема электрического многодвигательного привода машины агрегата.
На фиг. 1 показаны: la - вращающийся статор асинхронного двигателя; 16 - «ороткозамкнутый ротор последнего; 2 - подшипниковые стойки, 3 - эластичная муфта; 4 - червячный редуктор; 5 - эластичная муфта; 6 - серводвигатель для вращения «статора асинхронного двигателя (в дальнейшем обозначе) через СД).
На фиг. 2 и 3 обозначены: двигатель 1Д с вращающимся статором « короткозамкнутым ротором; нормальный асинхронный двигатель 2Д с короткозамкнутым ротором; серводвигатель СД для вращения статора двигателя 1Д; магнитные пускатели 1Л и 2Л двигателей 1Д и 2Д: реверсивные магнитные пускатели ЗКБ и 5/СМ серводвигателя СД; тепловые реле 1РТ и 2РТ п ткателе) 1Л и 2Л; нижний и верхний путевые выключатели 1ВП и 2ВП кареткн нетлеобразователя (компенсатора)
/С; переключатели ПУ-1, ПУ-2, ПУ-З и ПУ-4 управления; кнопки ПА и СА пуска и остановки агрегата; кнопки 1П и 2П нпдивидуальпого пуска двигателей при занравке; кнопки О и П для ослабления и подтягиванмя петли TKaiHi; ведомая н ведущая производственные мапжны ПМ-1 и ПМ-2; средний путевой выключатель ЗВП каретки петлеобразователя; 1ВК и 2I3K - аварийные конечные выключатели па компенсаторе ткапи; липейные скорости Vi и V2 движения гибкогО материала, например, на входе и выходе из петлеобразователя К.
При равенстве скоростей FI и V: каретка петлеобразователя К неподвижна.
Схема управления обеспечивает два режима: «заправку и «работу. Положение переключателей ПУ-1, ПУ-2, ПУ-З и ПУ-4 при указанных режимах следующее:
Режим
3;iilp;il.K;i
Иорсключагсль
ПУ-1 л у-2 ПУ-З ljy-4
Знак «- обозначает холостое по.чожение .коптактог перск.лючатс.тей и знак О - рабочее (замкнутое) их положение.
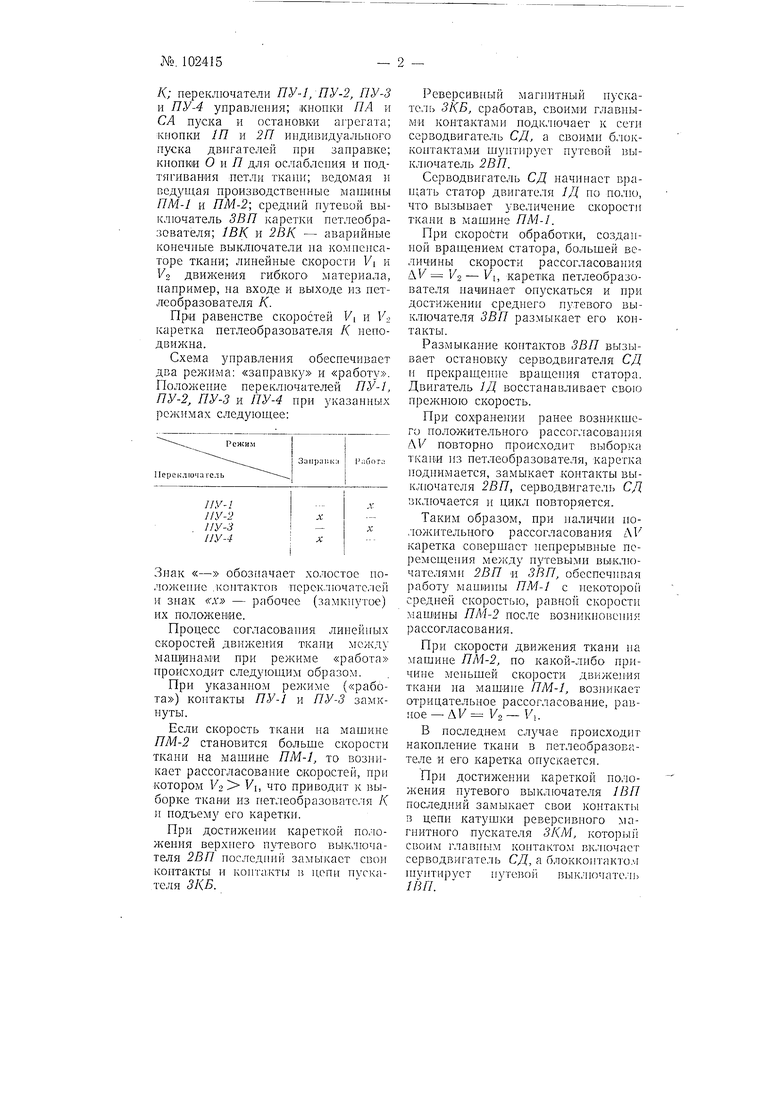
Процесс согласования линейных скоростей движе1шя ткапи между машинами при режиме «работа происходит следуюидим образом.
При указанном режиме («работа) контакты ЯУ-/ и ПУ-З замкнуты.
Если скорость ткани на машине ПМ-2 становится больше скорости ткани на машине ПМ-1, то возникает рассогласование скоростей, при котором 2 У, что приводит к выборке ткани из пет;1еобразовате,1я К II подъему его каретки.
При достижении кареткой ноложения верхнего путевого выключателя 2ВП последннй замыкает свои контакты н контакты в цепи пускателя .
Реверсивный магнитный пускатель ЗКБ, сработав, своими главными контактами подключает к сети серводвигатель СД, а своими б.чоккоптактами шзнтирует путевой выключатель 2ВП.
Серводвигатель СД начинает вран;ать статор двигателя 1Д по полю, что вызывает увеличепие скорости ткани в машине ПМ-1.
При скорости обработки, созданной врашением статора, большей величины скорости рассогласования V - ь каретка петлеобразователя начинает опзскаться и при достижепии среднего путевого выключателя ЗВП размыкает его контакты.
Размыкание контактов ЗВП вызывает остановку серводвигателя СД и прекращение врандепия статора. Двигатель 1Д восстанавливает свою прежнюю скорость.
При сохранении ранее возникшего положительного рассог.часования повторно происходит выборка ткани из петлеобразователя, каретка поднимается, замыкает .контакты выключателя 2ВП, серводвигатель СД включается н цикл повторяется.
Таким образом, при наличии положительного рассогласования Л1 каретка совершает непрерывные перемещения между путевыми выключателямн 2ВП и ЗВП, обеспсч1115ая работу машины ПМ-1 с некотороГ средией скоростью, равной скорости машины ПМ-2 после возиикновсмшя рассогласования.
При скорости движения ткани на машине ПМ-2, по какой-либо нричине меньшей скорости движения ткани на машине ПМ-1, возникает отрицательное рассогласование, равное-Д1/ -1Л.
В последнем случае происходит накопление ткани в петлеобразователе и его каретка опускается.
При достижении кареткой положения путевого выключателя 1ВП последний замыкает свои контакты в цепи катушки реверсивпого магнитиого пускателя ЗКМ, которьп своим главным контактом включает серводвигатель СД, а блоккоитактол шунтирует путевой выключатель 1ВП.
Серводвигатель СД начинает вра1дать статор двигателя 1Д против поля, умеиьшая скорость движения ткани в машине ПМ-1.
Ес;нг скорость обработки, созданная вращением статора против иоля, ио абсолютной величине больше возникаюн(его отрицательиого рассогласования - ДУ, то начинается выборка ткани из петлеобразователя, каретка поднимается и при достижении среднего путевого выключате,1я ЗВП размыкает его контакты и серводвигатель останавливается. Двигатель 1Д восстанавливает свою прежнЕОЮ скорость.
При сохранении ранее возникшего отрицательного рассогласования -ДК происходит накопление ткани в петлеобразователе, каретка опускается и при достижении путевого выключателя 1ВП замыкает его контакты, вследствие чего включается серводвигатель и цикл повторяется.
Таким образом, при наличии отрицательного рассогласования - AV каретка петлеобразователя соверHjacT непрерывное перемещение между путевыми выключателями 1ВП и ЗВП, обеснечнвая работу маН1ННЫ Г1А4-} с некоторой среднеГ скоростью, разной скорости маигины П.М-2.
Предмет изобретения
1.Электрический многодвигательпын привод машин агрегата, связанных между co6oio тканью или материалом через петлеобразователь и получающих вращение от асинхронных электродвигателей с короткозамкнутым ротором и вран ающимся статором, приводимым от серводвигателя, о т л и ч а ю их и йс я тем, что, с целью автоматнзации процесса компеисации возможиых рассогласований линейных скоростей движения ткани между маниь иами, для включения серводвигателя использованы иутевые контакты, унравляемые кареткой петлеобразователя.
2.Привод по и. I, о т л и ч а 10щ и и с я тСаМ, что, с целью предупреждения самопроизвольного вращения статора приводного двигателя в режиме нордшльной работы, статор соединен с серводвги ателем через самотормозян1,ийся черг, редуктор.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый электропривод | 1960 |
|
SU132297A1 |
| Силовая установка | 1943 |
|
SU64410A1 |
| Электрический вал с двумя асинхронными двигателями | 1959 |
|
SU136439A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1967 |
|
SU205922A1 |
| Устройство для автоматического регулирования скорости замедления шахтных подъемных машин | 1949 |
|
SU86093A1 |
| СПОСОБ ИМПУЛЬСНО-ЧАСТОТНОГО РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА С ИСТОЧНИКОМ ИЗМЕНЯЕМОЙ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574380C2 |
| -С^СОЮЗНАЙ | 1973 |
|
SU374399A1 |
| Устройство контроля скорости синхронного двигателя и защиты его от асинхронного режима | 2020 |
|
RU2774920C2 |
| Устройство для торможения асинхронного двигателя | 1961 |
|
SU150916A1 |
| Устройство для распределения активной мощности между двумя параллельно работающими синхронными генераторами | 1957 |
|
SU118883A1 |


ПМ-1
-Q
1
/7//-
2
(
Чи/м
