, Устройство по п. 1, о т пи ч а ю- щ в в с я тем, что оцна изграней.зеркального барабана закреплена перпендикулярно оси вращения./
3. Устройство по пп, 1 и2,. отли-ч чающееся тем, что зеркальньй
барабан установлен на вьшосном кронштейне впереди транспортного средства с возможностью регулируемого разворота вокруг горизонтальной оси, перпендикулярной оси вращен-ия барабана,.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ РЕЛЬЕФА МЕСТНОСТИ С ПОДВИЖНОГО НОСИТЕЛЯ | 1977 |
|
SU1840747A1 |
| Мобильный комплекс мониторинга открытых участков местности | 2019 |
|
RU2708802C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
1. УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОФИЛЯ МЕСТНОСТИ ПЕРЕД ТРАНСПОРТНЫМ СРЕДСТВОМ, преимущественно для системы управления автономными транспортными средствами, соп Vj держащее установленный на транспортном средстве лазерный измеритель расстояний, оборудованный узлом сканирования лазерного луча в плоскости, перпендикулярной, направлению движения, и процессор для обработки результатов измерения для обнаружения препятствий для движения, отличающееся тем, что, с целью построения в течение одного цикла сканирования поперечных профилей на различных удалениях от транспортного средства, узел сканирования выполнен на основе вращающегося зеркального барабана, грани которого наклонены под различными углами к оси вращения барабана, параллельной оптической оси совмещенной прие- Р В мопередающей системы лазерного измериО) теля расстояний, ориентированного по направлению движения транспортного средства. 0Ht.t
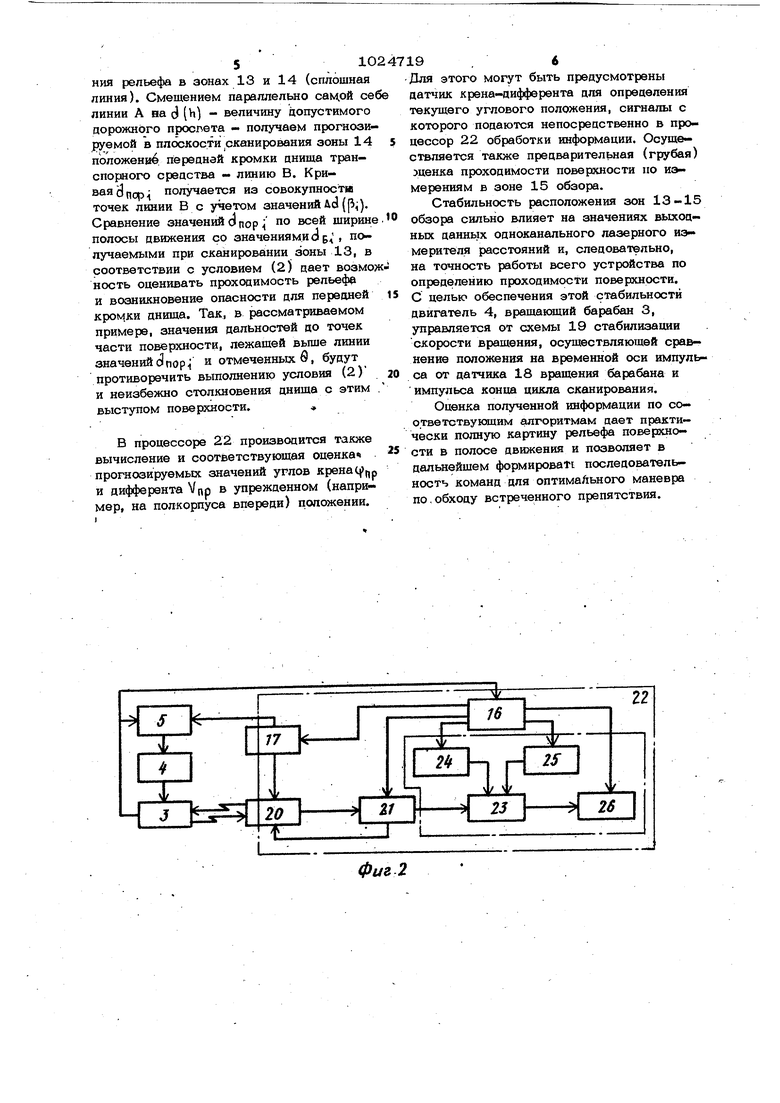
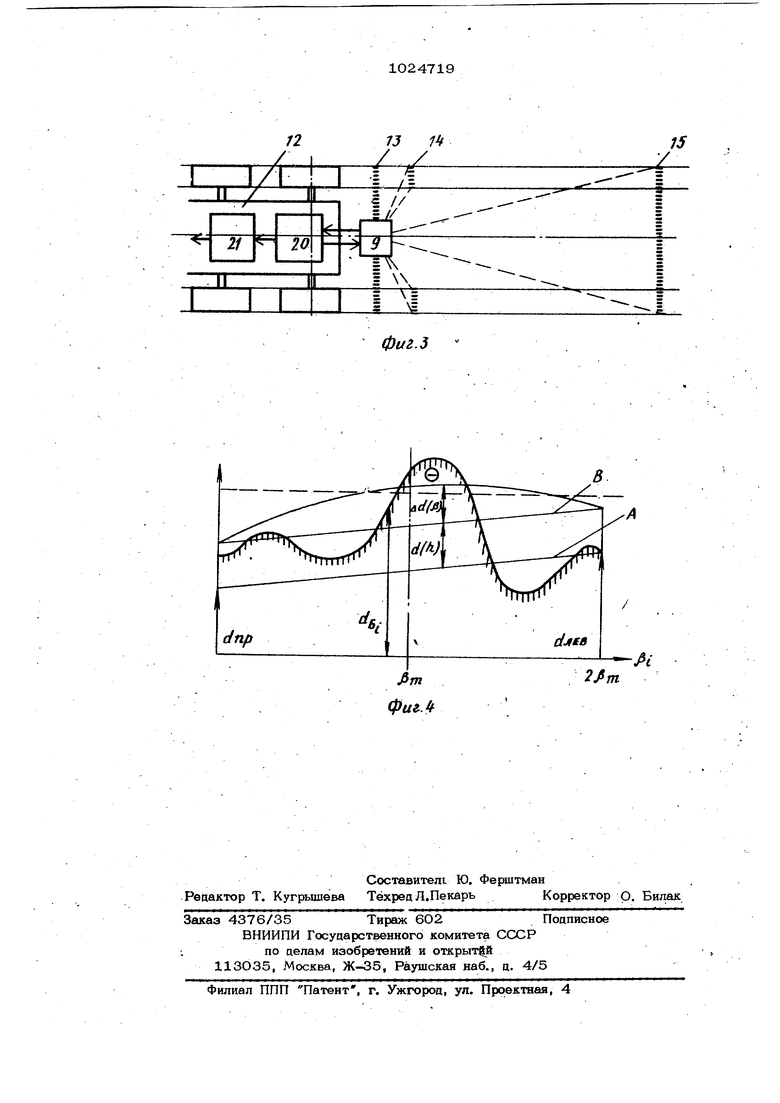
Изобретение относится к средствам iопределения,профиля местности преимущественно перед движущимся транспортным средством. Подобные устройства особенно необходимы для систем управ-ления движением автономными транспортными средствами. Известны устройства для определения профиля, разработанные на основе проекционных дальномеров геометрического типа, которые получили щирокое pacnpft)странение для определения продольных и поперечных профилей железнодорожных или автомобильных туннелей, проводников щахтных стволов и т.п. Il , Однако использование этих устройств на автономном транспортном сре{йЬтве оказывается затруднительным вследствие значительных габаритов применяемого дальномера. Кроме того, такие устройств обеспечивают определение поперечного профиля каждый раз только в одной плоскости, соответствующей местоположению транспортного средства. Известны устройства для определения профиля, построенныеj с использованием электронно-оптических дальномеров, в т.ч. и С; совмещенными; приемопередающими оптическими системами 2 . Однако необходимость приводить во вращение дальномер в 1юлом пелает подобные устройства непригодными для установки на автономные движущиеся объекты. Наиболее близким по технической сущности к предлагаемому является уст ройство, содержащее установленный на транспортном средстве лазерный измеритель расстояний, оборудованный узлом сканирования лазерного луча в плоскости . перпендикулярной направлению движения, и схему обработки результатов измерений для обнаружения препятствий йП . . Сканирование по азимуту осуществляв ся с пок-отцью линейки коммутируемых па зеров, а по у..лу возвьииенйя - с помощью колеблющегося зеркала. Таким образом не удается построить поперечные профили на различных расстояниях от . транспортного средства. Не выбираются также мертвые зоны на расстояниях порядка метров перед транспортным .средством. Кроме того, в известном устройстве не предусматриваются средства для учета изменений положения транспортно-1 го средства. Целью изобретения является построение за один цикл сканирования поперечных профилей на различных удалениях от транспортного средства. Указанная цель достигается тем, что в устройстве для определения профиля местности перед транспортным сред(5твом, содержащем установленный на транспортном средстве лазерный измеритель расстояний, оборудованный узлом сканирования лазерного луча в плоскости, перпендику - лярной направлению движения, и процессор для обработки результатов измерений, для обнаружения препятствий, узел сканирования выполнен на снове вращающегося зеркального барабана, грани которого наклонены под различными углами к оси вращения .барабана, параллельной оптической оси совмещенной приемопередающей системы лазерного измерителя, ориентированного по направлению движения. Одна из граней зеркального барабана, закреплена перпендикулярно оси вращения, а сам барабан установлен на вьшосном крс ншЛйне впереди транспортаого средства с возможностью регулируемого разворота горизонтальной оси, перпендикулярюй оси скани ющего вращения барабана. На фиг. 1 показано построение лазерного измерителя расстояний с узлом ска- шрования; на фиг. 2.- принципиальная 5лок«чзхема устрсйства; на фиг. 3 - схема, иллюстрирующая расположение зон сканирования поперэчных профилей} на фиг, пример построения профилей по результатам измерения в полосе движения автономного транспортного средства. Лазерный измеритель расстояний выполнен на основе полупроводникового лазера 15 установленного перец передающим объективом 2, направляющим модулированный по интенсивности световой поток на зеркальный барабан 3, привоцимьхй во вращение двигателем 4 через редуктор 5. Весь этот узел сканировании крепится на вьшосном крошитгейне (не показан) и уста навливается перед транспортным срецство с возможностью вращения вокруг горизонтальной оси, перпендикулярной оси сканирукицёго вращения барабана 3. Ось враще ния барабана паралл ельна оптической оси объектива 2 и кольцевого приемного объек тива 6, фокусирукяцего отраженный от поверхности поток на фотодетекторе 7 лазерного измерителя расстояний. Грани 811 баребана 3 установлены под различными углами к оси вращения барабана, при этом одна из граней, а именно грань llj закреплена оерпендикуля,7Но оси вращения, что позволяет использовать ее в качестве калибровочной пластины. Обзор поверхности производится непрерьшно при перемещении транспортного средства 12 в нескольких зонах, соответствующих каждая своей грани зеркального . Так граням 8 - 10 соответствуют зоны 13 - 15. Команды на срабатывание лазерного измерителя расстояний подаются от управляющего блока 16 через схему. 17 запуска и регистрации результатов измерений. Формирование команд в блоке 16 синхронизировано с вращением барабана,3 благодаря обратной связл с приводным двигателем 4, осуществляемой через датчик 18 вращения барабана, входящий в схему 19 стабилизации вращения, и блок 20 синхронизации. Лазер 1 работает в гимпульсно(л режиме и включается только в интервале времени соответствующем требуемому положению граней 8-10 зеркального барабана. Элект рический сигнал, вырабатываемый фотодетектором 7 при поступлении света, отраженного от контролируемой поверхности в опредепенной зоне 13 - 15 обрабатывается в схеме 17 для получения величины расстояния до точки, от которой произошло отражение. Компенсация ощибо измерений, обусловленных внутренними причинами, осуществляется с помощью блока 21 калибровки, обеспечивающего точнение результата измерений, полученого в схеме 17, по значению, соответ твующему расстоянию до калибровочной рани-пластины 11. Исправленные значения измеренных асстояний поступают из блока 21 в проессор 22, к которому принадлежит также аряду со схемой 23 обработки- тД4 правлениясхемой 23, блок 25 редуцироания расстояний и блок 26 .формирования игналов опасности. Процессор 22 работат в реальном времени, т.е. в ритме вижения автономного транспортного средтва. Алгоритм работы процессора строится, апример, в соответствии с выражением .5лев- М леб- пр)(Ь) + й(рО, пределяющим проходимость местности по ысоте из условия де о пор - расчетная .величина порога проходимости, вычисленная по информации о дальностях до грунта, измеренных в зоне 14 сканирования на продолжении колей движения; Одез, максимальные значения дальности до поверхности, измеренные на продолжениях со- ответственно левой и правой колей; - максимальный угол сканирования;, 1 - текущий угол сканирования; h)- дальность, соответствующая величине максимально прео-. долимого выступа; Лd(i)-корректирующая поправка, . учитывающая зависимость дальности от угла сканирования;. Og - текущая дальность до поверхности, измеряемая в зоне 13 сканирования. По измеренным расстояниям о дед иопр И известному углу р; сканирования всоответствии с формулой (1) формируется некоторая линия А. При этом для удобства определения наиболее высоких точек поверхности в зонах обзора отсчет даль ности дальномером производится от линии, соответствующей предельной измеряемой дальности, на которой соответствующий электрический сигнал равен О вольт. Таким образе чем вьше точки, тем больше пропорциональный дальности электрический сигнал. На фиг. 1 показаны сечения рельефа в зонах 13 и 14 (сплошная линия). Смещением параллельно сацой се линии А на (J (Ь) - величину допустимого дорожного проспета - получаем прогнози руемой в плоскости сканирования зоны 14 положений передней кромки днища транспорного средства - линию В. Кривая Зрф получается из совокупности точек линии В с учетом значений ДсЗ(р). Сравнение значенийdпор по всей ширине полосы движения со значениями d , по лучаемыми при сканировании зоны 13, в соответствии с условием (2) дает возмо ность оценивать проходимость рельефу и возникновение опасности для передней кромки днища. Так, в рассматриваемом примере, значения дальностей до точек части поверхности, лежащей вьщ1е линии значений d пор i и отмеченных Q, будут противоречить выполнению условия (2) и неизбежно столкновения днища с этим выступом поверхности. В процессоре 22 производится также вычисление и соответствующая оценкач прогнозируемых значений углов крена Ц) и дифферента Vnp в упрежденном (например, на полкорпуса впереди) положении.
Фиг 2 Для этого быть предусмотрены датчик крена-дифферента для определения текущего углового положения, сигналы с которого подаются непосредственно в процессор 22 обработки информации. Осуществляется также предварительная (грубая) женка проходимости поверхности по измерениям в зоне 15 обзора. Стабильность расположения зон 13-15 обзора сильно влияет на значениях выходных данных одноканального лазерного измерителя расстояний и, следовательно, на точность работы всего устройства по определению проходимости поверхности. С целью обеспечения этой стабильности двигатель 4, вращающий барабан 3, управляется от схемы 19 стабилизации скорости вращения, осуществляющей сравнение положения на временной оси импулыса от датчика 18 вращения барабана и импульса конца цикла сканирования. Оценка полученной информации по соответствуклцим алгоритмам дает практически полную картину рельефа поверхности в полосе движения и позволяет в дальнейшем формироваТ1 последовательность команд для оптимального маневра по,обходу встреченного препятствия.
фиг.З
В
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения метилового эфира 5-пропилтио-2-бензимидазолкарбаминовой кислоты | 1975 |
|
SU572201A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для постепенного включения и выключения фрикционных муфт в самодвижущихся экипажах и т.п. | 1919 |
|
SU356A1 |
