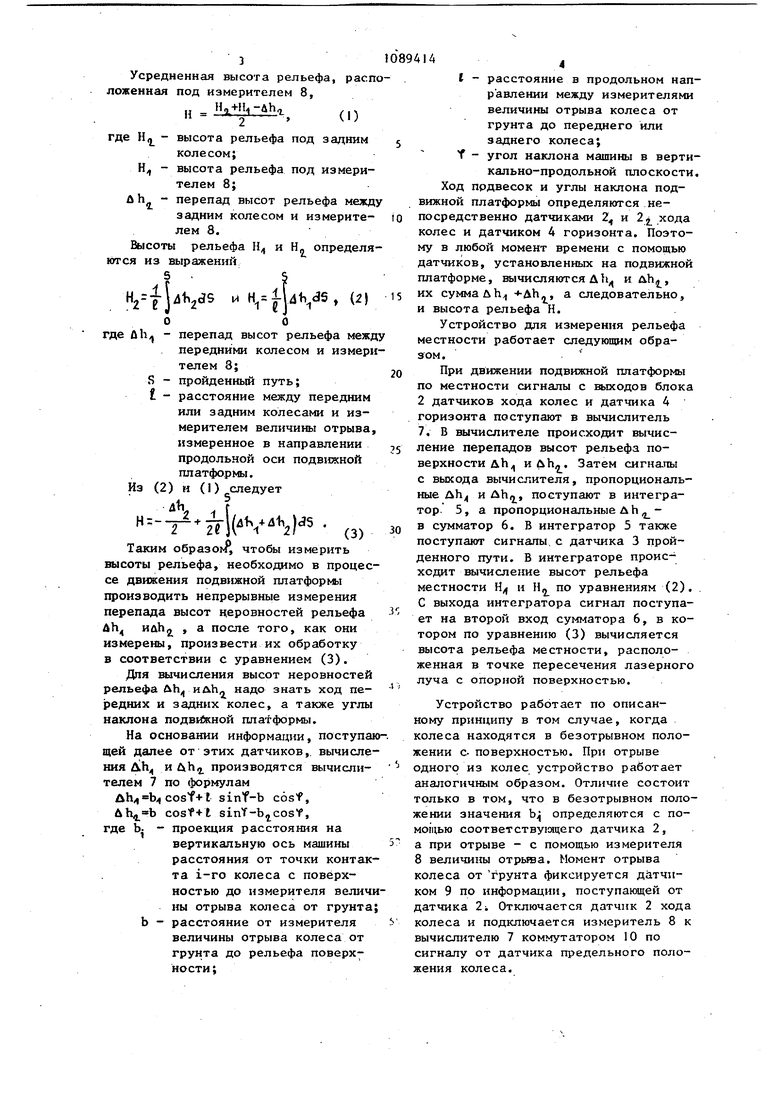
Изобретение относится к информационно-измери ельной технике и может быть использовано, например, для измерения рельефа местности в процессе движения транспортных машин. По основному авт. св. № 661235 известно устройство для измерения рельефа местности, содержащее цепь из последовательно соединенных блока датчиков хода колес, датчика предельного положения колеса, коммутатора, вычислителя, интегратора и регист- , ратора, датчика горизонта, подключенного к второму входу вычислителя измерителя величины отрыра колеса, связанного с вторым входом коммутатора, датчика пройденного пути, подключенного к вторым входам интегратора и регистратора, второй выход блока датчиков хода колес связан с третьим входом коммутатора ij. Недостатком известного устройств является то, что точность измерения профиля местности уменьшается с увеличением расстояния между колесами, на которых установлены датчики хода колес. Уменьшить эту погрешность невозможно, так как расстояние между колесами транспортного средства остается величиной постоянной и -в процессе эксплуатации не может быть изменено. Цель изобретения - повьш1ение точности измерений. Поставленная цель достигается тем, что устройство для измерения рельефа местности снабжено сумматором, вычислитель и интегратор выполнены с двумя выходами, вторые выходы вычислителя и интегратора подключены соответственно к первому и второму входам сумматора, а измеритель величины отрыва колес установ лен между колесами на ранном расстоя нии от каждого из них. о Па фиг. 1 представлена схема подвижной платформы с установленными на ней датчиками; на фиг. 2 - блоксхема устройства. Устройство, установленное на подв ганой платформе 1 (фиг. 1), состоит из блока 2 датчиков хода колес (фиг. 2), который в свою очередь содержит два датчика 2 и 2. (. установленных на двух соседних подвесках колес подвижной платформы. В состав устройства входят также (фиг. 1 и 2) датчик 3 пройденного пути, датчик 4 горизонта, интегратор 5, сумматор 6, вычислитель 7, измеритель 8 величины отрыва колеса, датчик 9 предельного положения колеса, коммутатор 10 и регистратор 11. Датчик 3 пройденного пути служит для измерения пройденного расстояния и может быть выполнен, например, в виде счетчика оборотов, установленного на оси ведущего колеса. Датчик 4 горизонта служит для измерения узлов наклона подвижной платформы в поперечной и продольной плоскостях. В качестве датчика может быть применена стандартная гировертикаль. Интегратор 5 предназначен для определения координат рельефа местности под колесами подвижной платформы. Сумматор 6 служит для измерения рельефа местности в неподвижной системе координат под колесами одного из бортов платформы. Вычислитель 7 определяет перепады высот неровностей профиля местности между точками контакта с рельефом переднего колеса и измерителя величины отрыва и между измерителем и задним колесом. Измеритель 8 величины отрыва колеса служит для измерения высоты рельефа относительно подвижной плат.формы и для определения измерений дальности до грунта под колесом, находящимся в отрыве от грунта. В качестве этого датчика может быть использован, например, лазерный дальномер. Датчик 9 предельного положения колеса служит для определения момента начала и конца отрыва колеса от грунта. В качестве такого датчика может быть применена пороговая система, например, триггер Шмидта. .Коммутатор 10 предназначен для подключения к вычислителю датчиков хода колес, если колеса находятся в безотрывном положении от грунта или измерителя 8 величины отрыва колеса - при отрыве колес. Регистратор 11 предназначен для записи координат рельефа и пройденного пути на чувствительную пленку при движении подвижной платформы по поверхности исследуемого рельефа. Из фиг. 1 видно, что высота рельефа местности, расположенная под измерителем 8, связанас высотой рельефа местности, расположенной под задним колесом Н соотношением н, -ah, 3 Усредненная высота рельефа, рас ложенная под измерителем 8, И (,) где Н - высота рельефа под задним колесом; Н - высота рельефа под измери телем 8; Л h,j - перепад высот рельефа меж задним колесом и измерите лем 8. Высоты рельефа Н и Н„ определя ются из выражений 2-е и H J-J4VS, (2) о о где uh - перепад высот рельефа меж передними колесом и измер телем 8; S - пройденный путь; t - расстояние между передним илн задним колесами и измерителем величины отрыва измеренное в направлении продольной осн подвижной платформы. (2) н (1) следует zVkv ( (3) Таким образо, чтобы измерить высоты рельефа, необходимо в процес се движения подвижной платформы производить непрерывные измерения перепада высот неровностей рельефа ДЬ ксиЬ , а после того, как они измерены, произвести их обработку в соответствии с уравнением (3). Дпя вычисления высот неровностей рельефа ЛЬ илЬ- надо знать ход передних и задних колес, а также углы наклона платформы. На основании информации, поступа щей далее от этих датчиков, вычисле ния ДН и uhj производятся вычислителем 7 по с юрмулам ДЬ Ь cosf+1 sinf-b cosf, cosf+t sinY-b cosf, проекция расстояния на вертикальную ось машины расстояния от точки контак та i-ro колеса с поверхностью до измерителя велич ны отрыва колеса от грунта Ь - расстояние от измерителя величины отрыва колеса от грунта до рельефа поверхности ; 14 I - расстояние в продольном направлении между измерителями величины отрыва колеса от грунта до переднего или заднего колеса; Т - угол наклона машины в вертикально-продольной плоскости. Ход прдвесок и углы наклона подвижной платформы определяются непосредственно датчиками 2 и 2 j хода колес и датчиком 4 горизонта. Поэтому в любой момент времени с помощью датчиков, установленных на подвижной платформе, вычисляются ДЬ и лЬ, их сумма ДЬ , а следовательно, и высота рельефа FI. Устройство для измерения рельефа местности работает следующим образом. При движении подвижной платформы по местности сигналы с выходов блока 2 датчиков хода колес и датчика 4 горизонта поступают в вычислитель 7. В вычислителе происходит вычисление перепадов высот рельефа поверхности дЬ и ДЬд, Затем сигналы с выхода вычислителя, пропорциональные ДЬ, и ДЬ,2, поступают в интегратор. 5, а пропорциональные сумматор 6. В интегратор 5 также поступают сигналы с датчика 3 пройденного пути. В интеграторе происходит вычисление высот рельефа местности Н и Н, по уравнениям (2). С выхода интегратора сигнал поступает на второй вход сумматора 6, в котором по уравнению (3) вычисляется высота рельефа местности, расположенная в точке пересечения лазерного луча с опорной поверхностью. Устройство работает по описанному принципу в том случае, когда колеса находятся в безотрывном полоении с- поверхностью. При отрыве одного из колес устройство работает аналогичным образом. Отлич11е состоит только в том, что в безотрывном полоении значения Ь определяются с помощью соответствующего датчика 2, а при отрыве - с помощью измерителя 8 величины отрыва. Момент отрыва колеса от грунта фиксируется датчиком 9 по информации, поступающей от датчика 2, Отключается датчик 2 хода колеса и подключается измеритель 8 к вычислителю 7 коммутатором 10 по сигналу от датчика предельного положения колеса.
uz.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| Устройство для измерения рельефаМЕСТНОСТи | 1979 |
|
SU847035A2 |
| Устройство для измерения рельефа | 1976 |
|
SU649950A1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
| Устройство для измерения профиля местности | 1986 |
|
SU1483259A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕВЫШЕНИЯ МЕЖДУ ТОЧКАМИ МЕСТНОСТИ | 1988 |
|
RU1764400C |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ РЕЛЬЕФА МЕСТНОСТИ С ПОДВИЖНОГО НОСИТЕЛЯ | 1977 |
|
SU1840747A1 |
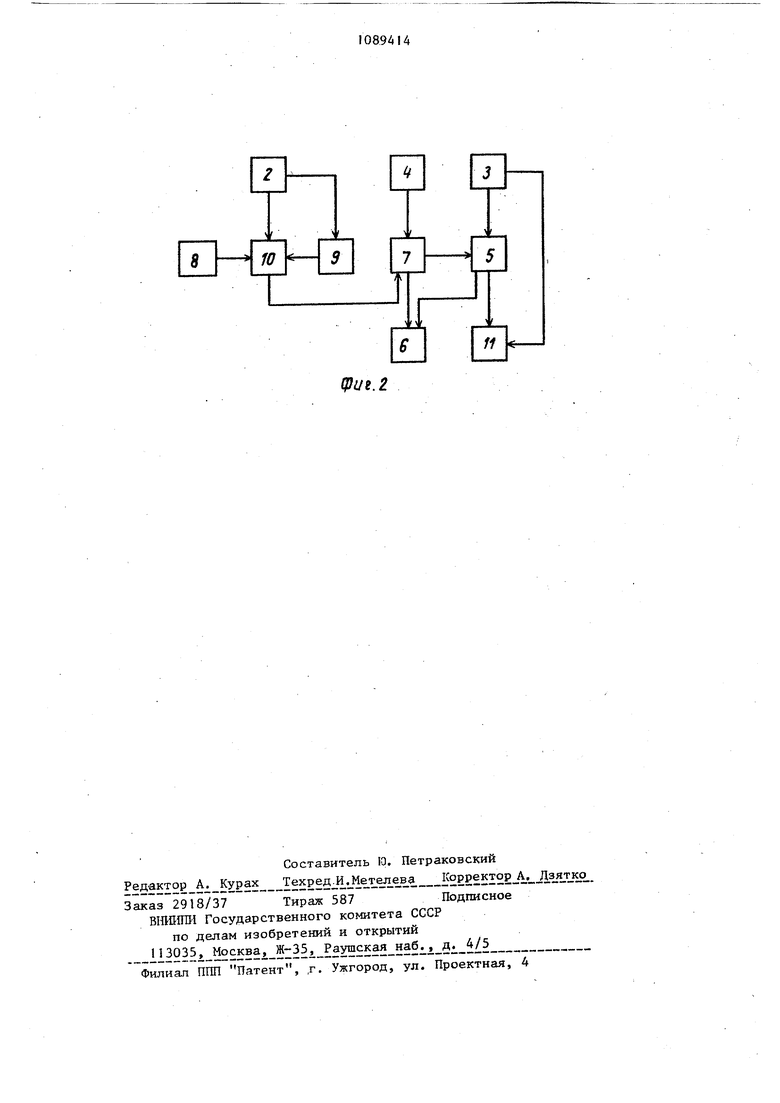
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ . РЕЛЬЕФА МЕСТНОСТИ по авт. св. № 661235, о тли ч а ю щ е вся тем, что, с целью повыления точности измерений, оно снабжено сумматором, спит ель и. интегратор выполнены с двумя выходами, вторые выходы вычислителя и интегратора подключены соответственно к первому и второму входам cytotaTOpa, а измеритель величины отрыва колес установлен между, колесами на равном расстояню от каждого из них. г оо ;о 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения профиля местности | 1976 |
|
SU661235A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
