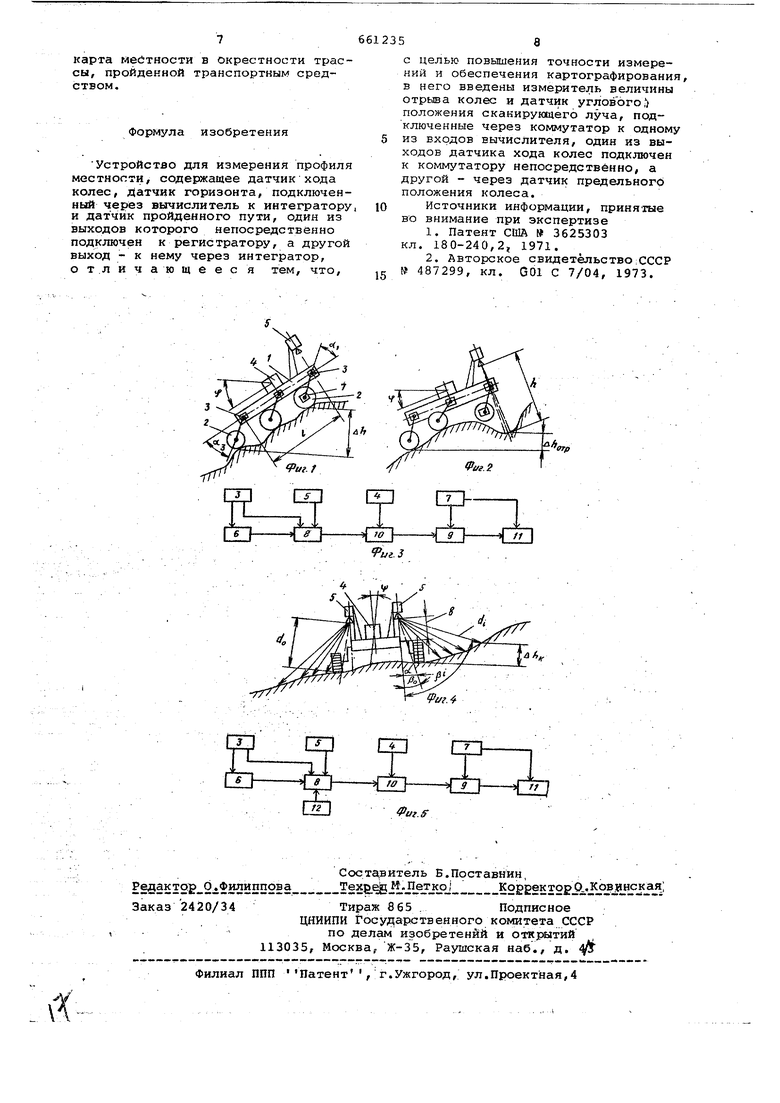
структурная схема устройства для иэ мерения профиля местности;на фиг.4 - работа устройства для картографиров ШйТйеетйОстй,установленного на подвижной платформе/на фиг.5 - структур ная схема системы картографирования местности, Предлагаемое устройство позволяе выполнять картографирование местнос пройденной транспо ртним средством. Измеритель величины оТужлва колеса от груйта выполнен со сканируквдим лучом и датчиком его углового положения, причем последний подключен к вычйслителю через коммутатор. Устройство для измерения профи МЯ йестйОсти, установленное на подвижной платформе 1, с подрессоренными колесами 2, состоит из датчиков 3 хода колес, датчиков 4 горизонта, измерителя 5 величины отрыва колеса от грунта, датчика 6 предельного положения колеса, датчика 7 пройден ного пути, коммутатора 8, интегратора 9, вычислителя 10 и регистрирующего устройствами. Для картографирования местности, пройденной транспортным средством, устройство дополнительно содержит датчик 12 углового положения сканирующего луча измерителя 5. Да тчики 3 Устанавливаются на подвесках колес служат для измерения величины хода колеса и могут быть выполнены,например, в виде индуктивных датчиков угла установленных на платформе 1 и связанных с осью балансира колеса.Датчи ки 4 служат для измерения текущих углов наклона подвихкной платформы.В качесгйе этих датчиков может быть пр MeHeiia стандартная гировертикаль.Дат чики 5 устанавливаются на подвижной платформе и служат для измерения дал нбсти д6 Грунта под колесом,находясщ ся в отрыве от грунта (фиг,2).Эти да чикимогут быть выполнены в виде неконтактных измерителей дальности,напри мёр в, виде лазерных дальномеров. Датчик Ь предельного пс1ложенйя колеса определяет момент начала и конца отрыва колеса от грунта. В качестве такого датчика может быть применена пороговая схема {триггер Шмидта), срабатьгаающая при достижении уровня сигнала от датчиков 3, стЬЬтвётствующего отрыву копёса от грунта. Датчик 7 измеряет пройденное расстояние и может быть выполнен например, в виде счетчика оборотов, установленного йа оси ведущего колеса. Коммутатор 8 предназначен для подключения к вычислителю датчиков 3 хода колёс, если колеса находятся в безотрывном положении или йёТШрЙтШя вели- ииы отрыва колеса S при отрыве колёса от грунта. Коммутатор 8 может быть выполнен на §3i KT|sOMaf нитйых или полупроводниковых элементах. Интегратор 9 преднаэначен для определения высот профиля местности путём решения уравнений (3 и 4) и может быть выполнен в вице суммирующего усилителя с интегрирующей емкостью в цепи обратной связи усилителя. Управление суммированием по входу и переключение начальных условий осуществляется по сигналам от датчика 7 пути и датчика 6 предельного положения колеса. Вычислитель 10 определяет перепады высот неровностей профиля местности между колесами в темпе движения подвижной г1латформы 1. Регистрирующее устройство 11 предназначено для записи координат профиля местности (высота, пройденный путь) на чувствительную пленку в процессе перемещения подвижной платформы по поверхности. Датчик 12 служит дпя измерения УГЛОВОГО положения -сканирующего луча И вйделейия зоны просмотра под провисшим колесом. Он может быть выполнен, например, по счетному принципу и состоит из датчика начальногЬ положения сканирующего луча дальномера, задающего генератора импульсов, счетчика и логической схемы вьщеления команд. При бёзбтрывном положении колес (фиг. 1) с поверхностью перепад высот неровностей рельефа Лп между колесами определяется из соотношения. Ah--R sin()-e.sin4-R3Bin(), (1) гдеК - радиус балансира i-ro колеса; ot угол наклона балансира i- го колеса относительно платформы; Ф- текущий наклон платформы в вертикально-продольной плоскости; С- расстояние между точками крепления подвески к платформе. При движении платформы по пересеченной местности неизбежен отрыв kortec от поверхности, а следователь но, неизбежна потеря информации о профиле поверхности, расположенной под оторванным колесом. Перепад высот неровностей (фиг. 2) при отрыве koлeca от грунта Определяется из соод-ношения ktiQ p-hcosM-e.sin -RjCOs (oL,,-c4V rcos4,2) где п - дальность до профиля поверхности, измеряемая измерителем величины отрйша колеса от грунта; Г - радиус колеса. Высота профиля местности, отсчитыаемая от горизонтального уройня, пределяется из соотношения , , (ъ-) сли колеса находятся в безот жетном оложении, и из соотношения если колесо оторвалось от поверхнос ЬдеДЯиач- перепад высот неровностей рельефа между, колесами в момент начала движения подвижной платфор, к торый определяется из уравнения (1) нач вьюота профиля местности момент .начала отрыва колеса от поверхности, которая определяется из уравнения (3) ; S - пройденное расстояние. При картографировании местности (фиг, 4) перепад высот неровностей в вертикально-поперечной плоскости определяется по следующему соотно.шению: Ah ..-d .cos (S-f iVbcosH+asinH. (oL tV1-vr cosSi где Ц - текущий угол наклона пЛатформы в вертикально-поперечной плос ,КОСТИ; (1- текущий угол наклона луча в вертикально-поперечной плоскости; ТЭ возвышение измерителя величины отрыва колеса от грунта над уровнем заделки балансира переднего колеса; U- смещение измерителя величин отрыва колеса от грунта относительно середины переднего колеса в попе речном направлении; наклонное расстояние до рельефа местности, измеренное в вертик альн ой плос кос ти, Сканирование луча производится таким образом, что одно из крайних его положений соответствует положению, в котором он должен находиться при отзыве колеса. Поэто, му, если процессе картографирования происходит отрыв колеса от грун та, то перепады высот неровностей в поперечной плоскости производитс по выражению (4 f4 Vd cosCl o- M), (6 гдебр- дальность, измеренная измерителем величины отрыва колеса от грунта, в момент времени, когда луч находится в крайнем положении угол установки луча в крайнем положении,, соответствующем отры ву колеса от грунта. За положительное направление Ч принят, наклон платформы на левый борт, а за положительное направление наклон :платформы на крЕму. Рассмотрим ра&о-гу.системы для измерения профилямаетности в двух возможных режимах: с учетом и без учета отрыва колеса от грунта. В первом случае, когда колесо находится в контакте с грунтом, в вычислитель 10 HenpejsiBHo поступает информация от датчика 4 и через коммутатор 8 от датчиков хода колес 3. В вычислителе по уравнению (1) определяется перепад высот неровное тей и вырабатывается электрический сигнал, пропорциональный i.1l, который далее поступает на один из входов интегратора 9. На другой его вход подается сигнал от датчика 7. С выхода интегратора сигнал, вычислен.ный по формуле (3) и пропорциональный высоте рельефа местности, поступает на устройство 11, на котором записывается во времени рельеф местности и Йройденное расстояние на пленку. Во втором случае, когда колесо отрывается от грунта, информация в вычислитель поступает не от датчика 3, а от измерителя 5 величины отрыва колеса от грунта. Момент отрива колеса от грунта фиксируется датчиком 6 по информации, поступающей от датчика 3, а отключается датчик 3 хода колеса и подключается измеритель 5 к вычислителю 10 коммутатором 8 по сигналу от датчика предельного положения колеса. Вычислитель по формуле (2) определяет перепад высот неровностей рельефа и вьарабатывает сигнгип, пропорциональный Afljjfpf который постует в интегратор 9. . В интеграторе высота рельефа вычисляется по формуле (4), Переход работы вычислителя с первого режима (колеса без отрыва от грунта) на второй (колеса оторваны от грунта) происходит по командам, поступактаим из коммутатора 8. Далее ра-бота устройства аналогична первому случаю, . Устройство картографировании Местности работает следукидим образом, ... Во-первых, измеряется рельеф местности,, по которому движется платфор}ла. Работа устройства в этом режиме Ьписана выше. Во-вторых, при картоЬрафированиирельефа местности луч Измерителя величины отрыва колеса от грунта совершает сканирование в вертикально-поперечной плоскости (фиг, 4). В процессе сканирования этого луча измеряется дальность до рельефа местности d в поперечном направлении и угол наклона этого луча .fla основании этих данных и данных, поступающих с датчиков 4 и 3, в вычислителе по формуле (5) определяется перепад .рельефа местности ti. . За один сканинг луча измеряется разрез местности в поперечном «аправлении. Профиль местности определяется за счет развертки по движению, получаемой при перемещении платформы. Информация от датчика 7 пути, г атчика 12 И измерителя 5, а также результаты обработки в вычислителе 10 по формулам (1, 2, 3, 4, 5, и rf) поступают в регистрирующее устройство 11, где происходит их запись на чувствительную пленку. В результате обработки этой информации строится

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения рельефа местности | 1982 |
|
SU1089414A2 |
| Устройство для измерения рельефа местности | 1977 |
|
SU735918A2 |
| Устройство для измерения рельефа | 1976 |
|
SU649950A1 |
| Устройство для измерения рельефаМЕСТНОСТи | 1979 |
|
SU847035A2 |
| Устройство для предотвращения столкновения автоматического транспортного средства с препятствиями | 1982 |
|
SU1062758A1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ РЕЛЬЕФА МЕСТНОСТИ С ПОДВИЖНОГО НОСИТЕЛЯ | 1977 |
|
SU1840747A1 |
| Устройство прогнозирования положения транспортного средства при движении по пересеченной местности | 1980 |
|
SU893595A1 |
| Устройство для измерения рельефа местности | 1986 |
|
SU1339395A2 |
| Система для измерения профиля грунтовой дороги | 1973 |
|
SU487299A1 |
| Устройство для определения профиля местности перед транспортным средством | 1981 |
|
SU1024719A1 |
