2. Устройство по п, 1, о 1 л ичающееся тем, что/ с целью исключения ложного срабатывания изза неровностей железнодорожного пути, оба конца гибкого элемента, охватываивдего ось колесной пары снизу, связаны с датчиком перемещения.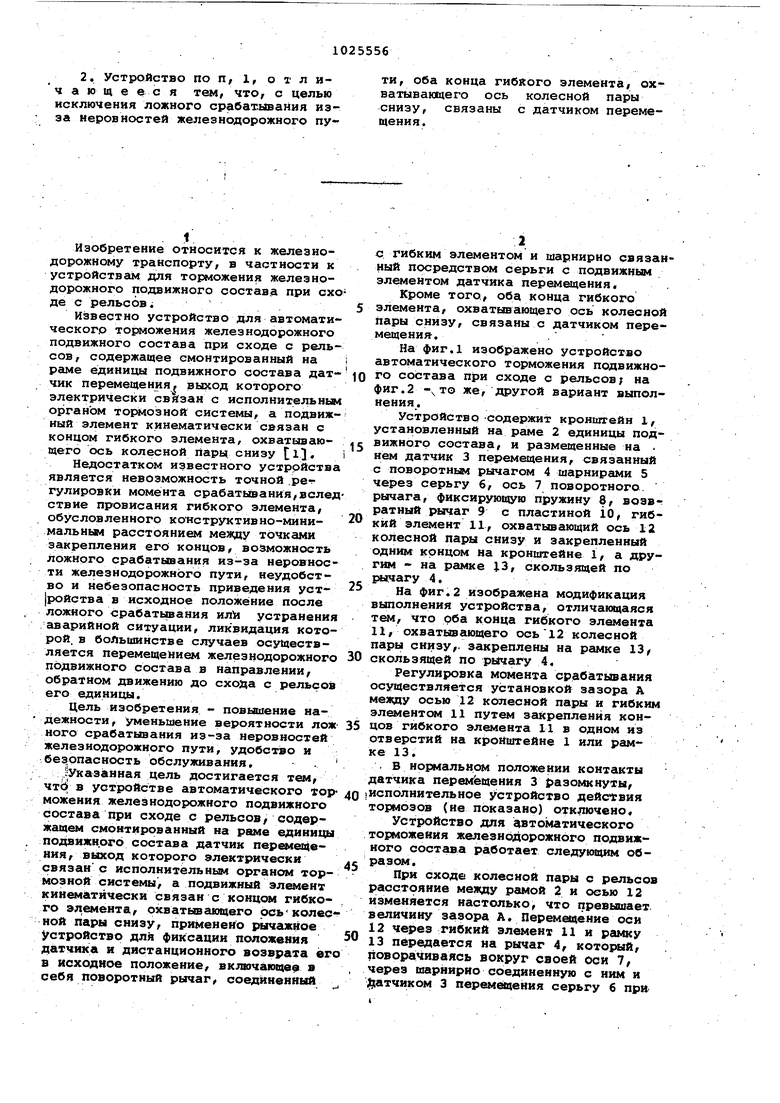
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического торможения железнодорожного подвижного состава при сходе с рельсов | 1976 |
|
SU686921A1 |
| Устройство для автоматического торможения железнодорожного подвижного состава при сходе с рельсов | 1987 |
|
SU1411196A1 |
| Устройство для автоматического торможения карьерного железнодорожного подвижного состава при сходе с рельсов | 1982 |
|
SU1022849A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОДВИЖНОГО СОСТАВА ПРИ СХОДЕ С РЕЛЬСОВ | 1992 |
|
RU2025340C1 |
| УСТРОЙСТВО ОСТАНОВКИ ПОЕЗДА ПРИ СХОДЕ КОЛЕСНОЙ ПАРЫ | 2021 |
|
RU2768095C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| Балочное заграждающее устройство для закрепления вагонов | 2014 |
|
RU2617910C2 |
| ПЕРЕДВИЖНОЙ АВТОМАТИЧЕСКИЙ ГРЕБНЕСМАЗЫВАТЕЛЬ | 2024 |
|
RU2831816C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Рычажно-пружинное устройство (варианты) и способ закрепления железнодорожного подвижного состава | 2018 |
|
RU2694881C1 |
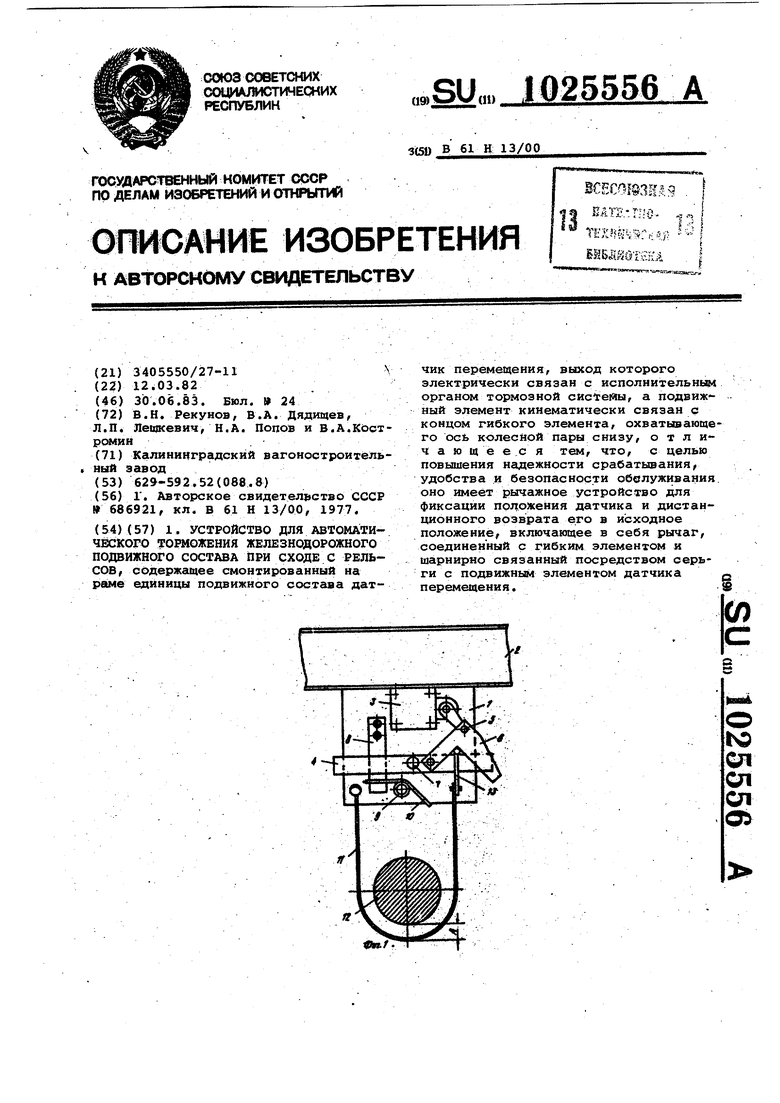
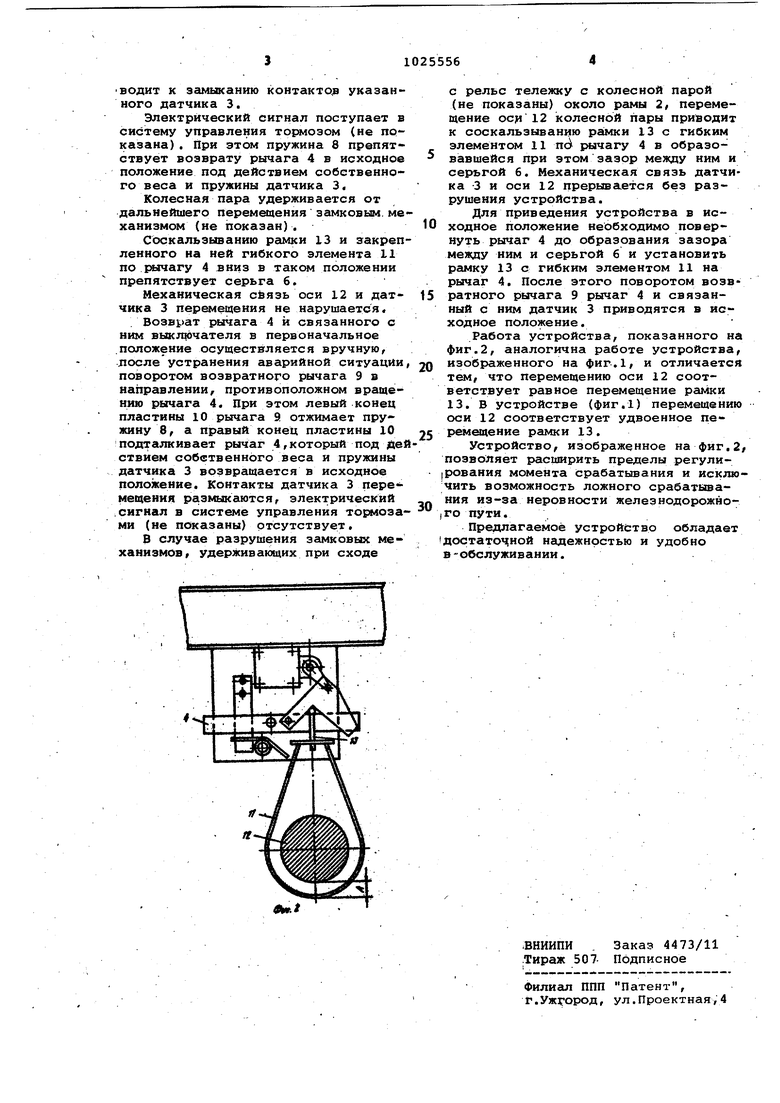
Изобретение относится к железнодорожному транспорту, в частности к устройствам для торможения железнодорожного подвижного состава при схо де с рельсов; Известно устройство для автоматического торможения железнодорожного подвижного состава при сходе с рельсов, содержащее смонтированный на раме единицы подвижного состава датчик перемещения выход которого электрически cBk3aH с исполнительным органом тормозной системы, а подвижный элемент кинематически связан с концом гибкого элемента, охватывающего ось колесной пары снизу 1}. Недостатком известного устррйства является невозможность точной .perгулировки момента срабатывания,вслед ствие провисания гибкого элемента, обусловленного конструктивно-минимальным расстоянием между точками закрепления его концов, возможность ложного срабатывания из-за неровнос ти железнодорожного пути, неудобство и небезопасность приведения уст|ройства в исходное положение после ложного срабатьюания ил устранения аварийной ситуации, ликвидация которой, в большинстве случаев осуществляется перемещением железнодорожного подвижного состава в направлении, обратном движению до схода с рельсов его единицы. Цель изобретения - повышение надежности, уменьшение вероятности лож ного срабатывания из-за неровностей железнодорожного пути, удобство и безопасность обслуживания, |Указа Нная цель достигается тем, 4Td; в устройстве автоматического top можения железнодорожного подвижного состава при сходе с рельсов/ содержащем смоктированиый на раме единицы подвижнргб состава датчик перемещения, выход которого электрически связанс исполнительным органом тормозной с ис т емы, а подвижный элемент кинематически связан с концом гибкого элемента, охватывающего рськолес ной пары снизу, применено рычгикиое устройство для фиксации положения датчика и дистанционного возврата ег в исходное положение, включающее в себя поворотный рычаг, соединенный с гибким элементом и шарнирно связанный посредством серьги с подвижным элементом датчика перемещения. Кроме того, оба конца гибкого элемента, охватывающего ось колесной пары снизу, связаны с датчиком перемещения. На фиг.1 изображено устройство автоматического торможения подвижного состава при сходе с рельсов; на фиг.2 же, другой вариант выполнения. Устройство содержит кронштейн 1, установленный на раме 2 единицы подвижного состава, и размещенные на нем датчик 3 перемещения, связанный с поворотным рычагом 4 шарнирами 5 через серьгу 6, ось 7 поворотного, рычага, фиксирующую пружину 8, воэвратный рычаг 9 с пластиной 10, гибкий элемент 11, охватывающий ось 12 колесной пары снизу и закрепленный одним концом на кронштейне 1, а другим - на рамке }.3, скользящей по рычагу 4. На фиг.2 изображена модификация выполнения устройства, отличающаяся тем, что оба конца гибкого элемента II, охватывающего ось12 колесной пары сн11зу,. закреплены на рамке 13 скользящей по рычагу 4. Регулировка момента срабатывания осуществляется установкой зазора А между осью 12 колесной пары и гибким элементом 11 путем закрепления концов гибкого элемента 11 в одном из отверстий на кронштейне 1 или рамке 13. . в нормальном положении контакты датчика перемещения 3 { азомкнуты, {Исполнительное устройство действия тормозов (не показано) отклпочено. Устройство для автоматического торможения железнодорожного подвижного состава работает следующим образом. При сходе колесной пары с рельсов расстояние между рамой 2 и осью 12 изменяется настолько, что превышает, величину зазора А. Перемещение оси 12через гибкий элемент 11 и рамку 13передается на рычаг 4, который, поворачиваясь вокруг своей оси 7, через шарнирно соединенную с ним и Ь(атчиком 3 перемещения серьгу 6 при
| Г | |||
| Устройство для автоматического торможения железнодорожного подвижного состава при сходе с рельсов | 1976 |
|
SU686921A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
