N0
з:
У1
KJ
Изобретение относится к измерительной технике и может быть использовано для определения параметров течений, распределенных по глубине океанов или мооей, в океанографии.
Известен способ Макарова-Нансена определения течения с судна, заключающийся в одновременных наблюдениях с двумя вертушками: первой опущенной на горизонт, где следует измерить течение, и второй, опущенной на значительную глубину, где течение, как предполагается, отсутствует. Нижний прибор регистрирует скорость дрейфа судна, но в противоположном действительному направлении, а верхний - равнодействующую измеряемого истинного течения на глубине его погружения и движения Гобратного1 судна. По этим данным на основании параллелограмма скоростей определяют направление и скорость течения на заданном горизонте, как вторую Составляющую 1,
Однако на больших глубинах существуют течения, скорости которых иногда сравнимы со скоростями течения в поверхностных слоях, а направление может значительно отличаться от направления поверхностного течения, поэтому определение этим способом параметров течения приводит к значительным ошибкам. Кроме того, измерение параметров течения возможно только в дрейфе судна, что усложняет осуществление съемки намеченного полигона, так как судно при дрейфе почти неуправляемо, Скорость дрейфа в сравнении с возожной скоростью хода судна мала, то увеличивает время съемки полигона.
Наиболее близким по технической сущности к предлагаемому является способ определения параметров течения по ходу суднау заключающийся, в том, что на судне буксирукием измеительную линию с датчиками, распрееленньлми по ее длине, путем его еремещения галсами определяют на каждом галсе направление движения судна 2,
Недостатком известного способа явяется невозможность измерить параетры течения, распределенные по глубине всего слоя, в котором нахоится измерительная линия.
Цель изобретения - повышение быстродействия процесса съема поля течения,
Поставленная цель достигается тем, что согласно способу определения вертикальной структуры поля течения на ходу судна, буксирующего измерительную линию с датчиками, распределенными по ее длине, путем перемещения судна галсами и определения на каждом галсе направления движения cyднa осуществляют не менее трех галсов с постоянной скоростью судна и на каждом галсе с помощью датчиков измерительной линии определяют скорость потока, обтекающего из мерительную линию глубину погружения участков измерительной линии, отклонение измерительной линии от диаметральной плоскости судна в
0 плане, затем определяют направление потока в географических координатах и по векторам скорости потока распределенным по глубине, определяют составляющие вектора течения в вертикальной плоскости.
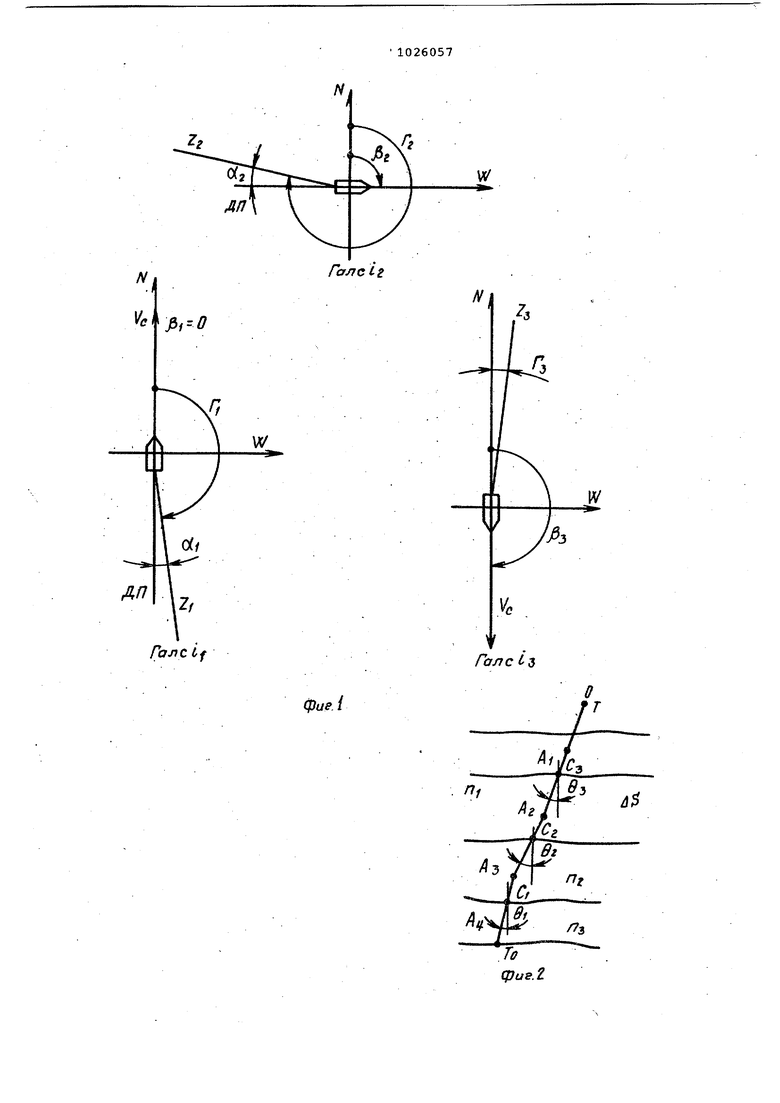
На фиг, 1 изображены галсы судна j, j и j, выполненные на участке полигона океана при буксировке измерительной линии , на
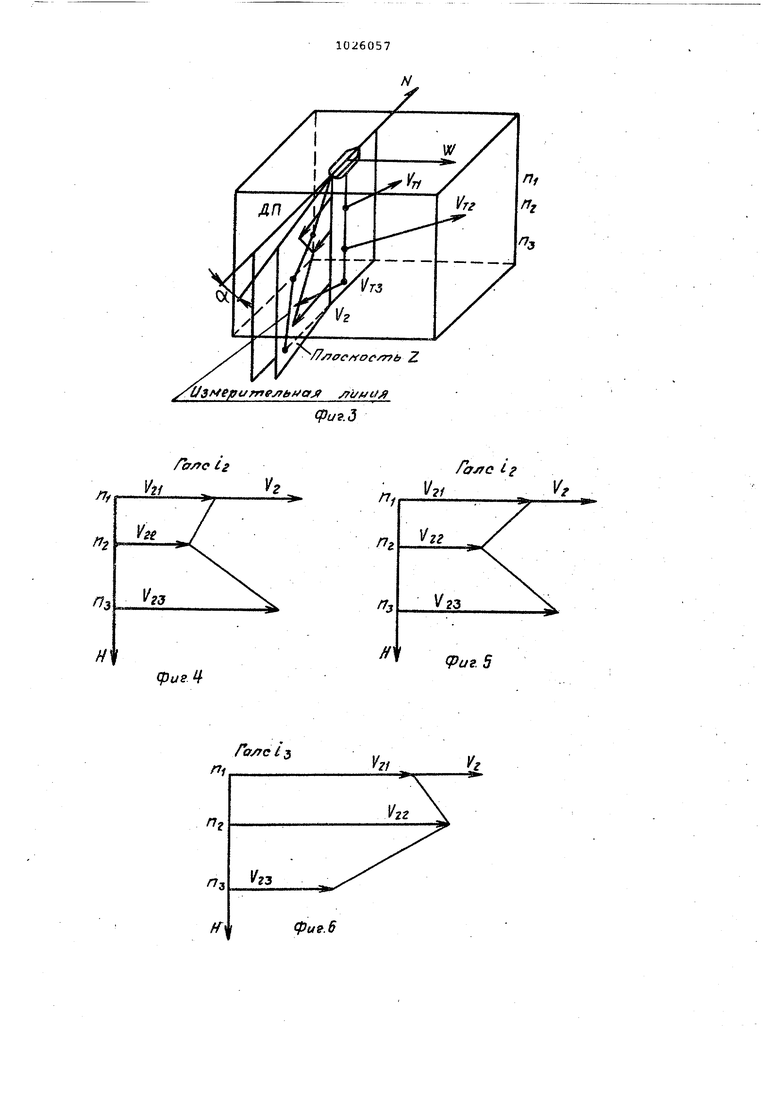
0 фиг, 2 - гидрологическая измерительная линия, буксируемая судном, профиль которой определяется соответственно для каждого галса т. i -и на фиг, 3 - судно, буксирующее гидрологическую линию по галсу : в пространстве, а также плоскость Z, в которой лежит измерительная линия и поток жидкости 2 , распределенный по глубинам п , п 2. и п и формирующий-профиль измерительной линии, и распределение истинного те-чения 1 по глубинам п , п и на фиг. - эпюры потока жидкости -2, распределенные по глубинам
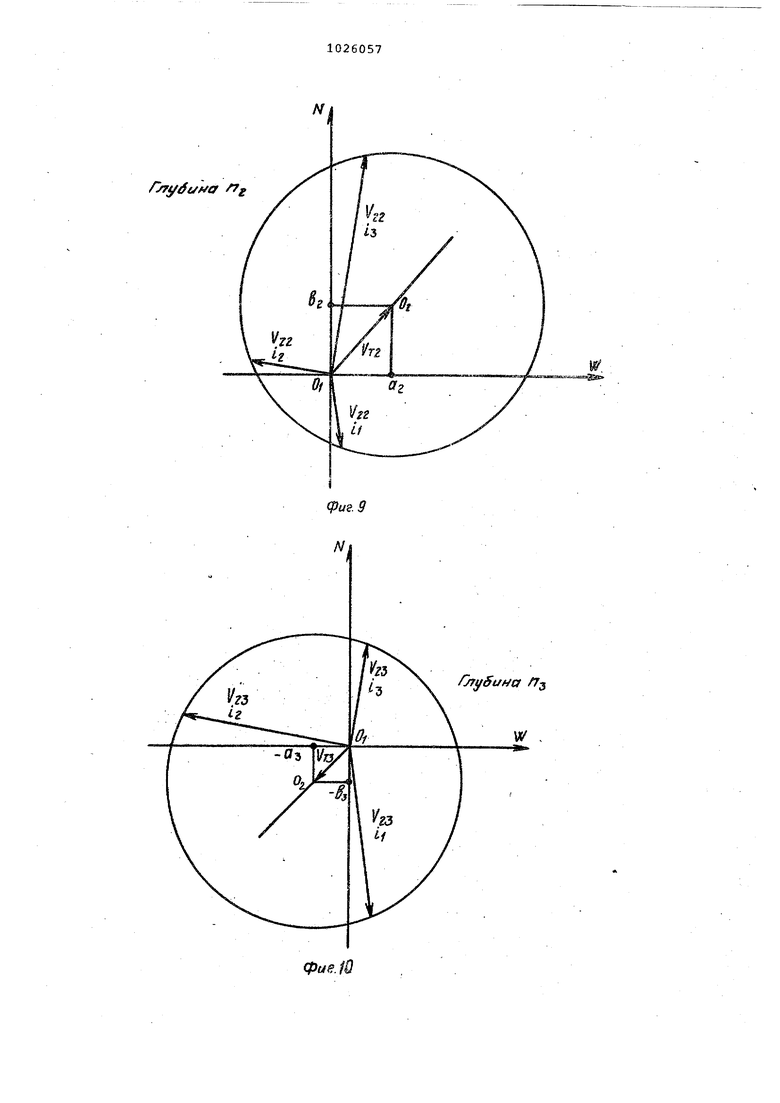
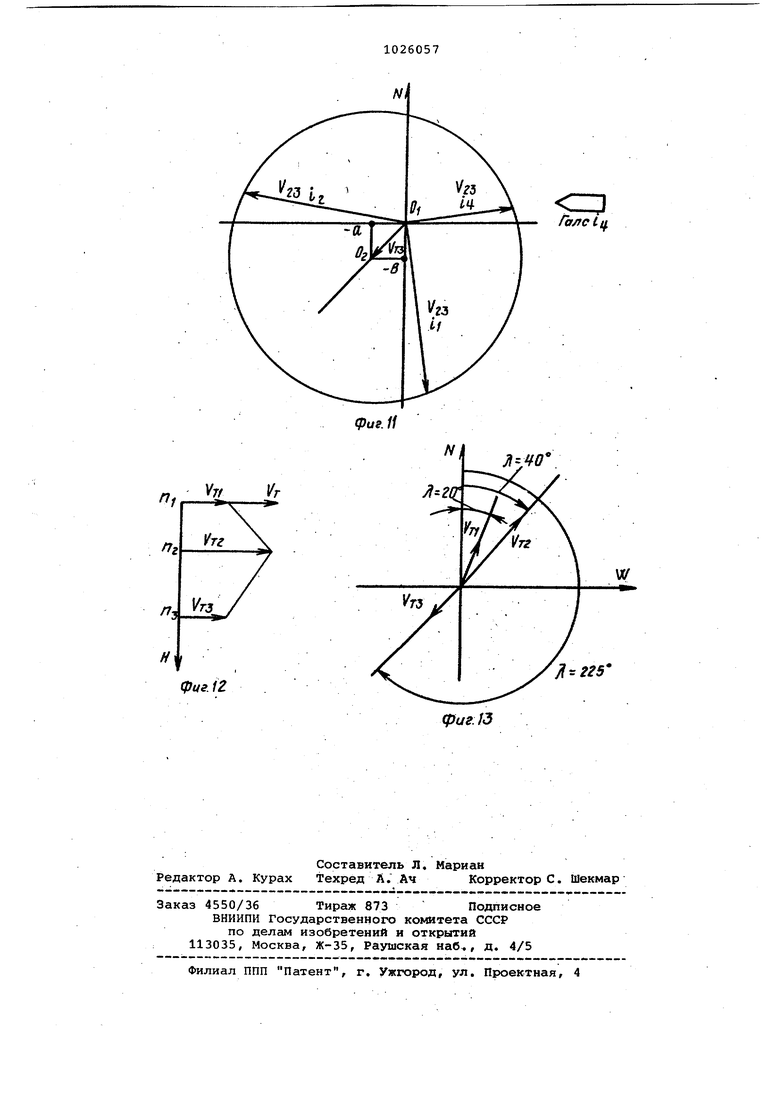
,п, Hi и HI для галсов з, a,. з , судна, на Лиг. 7 - распределение V-J для глубины ГЦ в плоскости горизонта глубины (вид сверху), поясняющее определение 1$рординат х и у для концов вектора соответственно для галсов j, j и, J , на фиг. 8-10 - векторы V для глубин соответственно п, плоскости горизонта глубины (вид сверху). поясняющие определение координат точки 0, модуля и направление ис инного течения, т.е. определение V , на фиг. 11 - вектор А.ДЛЯ глубины п, где вместо галса (фиг. 10) введен галс ц, что показывает,,что
0 при любых галсах конец вектора Vz
лежит на окружности с центром на фиг. 12 - эпюра значений модуля истинного течения участка полигона, на котором осуществлялись галсы
ги з,г ; на фиг. 13 - векторы
о т,. VT
-Ч
Ti та и VT, географических координатах (вид сверку) на участке полигона, на котором осуществлялись галсы .t , Ij. |э ,
Способ осуществляют следукядим образом.
Исследуемый полигон океана условно делят на участки (или обозначают точки координат, в которых будут осуществляться галсы судна). Судно с постоянной скоростью V осуществляет, например, галсы i, 2 и i,, на участке полигона (или в точке координат полигона) соответственно под углами , О, 50 180 относительно севера (фиг. 1). На каждом укаэайгном галсе i , i и 1,,(фиг. 2) осуществляют измерение угла 9 отклонения участков измерительной линии, .расположенных между датчиками (например датчиками угла и давления) А А, и от вертикали, или определяют О по известной длине участков и показанию.датчиков давления.. . ,
Затем измеряют глубину располо|Жения участков измерительной линии с помощью Датчиков давления и с покющью датчиков усилия усилие натяжения Т на средине участков измерительной линии в точках С, С и С- или измеряют, усилие натяжения на одном из концов линии и определяют натяжение на средине участков линии аналитически по формулам
. ° 0-йр Й . СО ® П ср,
если измерено натяжение в нижней .точке линии А. Если натяжение определяется S точке О крепления измерительной линии на судне, тогда расчет наряжения на средине участков измерительной линии осуществляют сверху вниз (фиг. 2).
Далее измерят на каждом галсе 1 , 1 и i угол отклонения oi- измерительной линии от диаметральной плоскости судна (да) и направление (курс) судна р СФиг. 1 и 3). По о( и р для каждого галса определяют угол Г отклонения измерительной линии относительно севера (т.е. определяют ее положение в географических координатах) при f,, Г fi + + 180 - c/ ; р. О, г О + 4- 180 - « при 1ЧГ2.„ fie + + 180° + dft; Т,, 90 + 10 280 ; при U Г« Р% - 180 ч- o/vЬ 180 + 7° 7.
Определяют скорость потока Z в плоскости формирующего профиль измерительной линии,соответственно для го ризонтов (глубин) П-, п, (фиг.3-6) для соответствующих галсов -j , и по математической модели, описывающей зависимость профиля измерительной линии от воздействия на нее переменного по глубине потока
-Т. .ecog&cp) , .
Д0 5&„сов вс,р4-эе. Up &cp-ueein p)
-w
здесь
, Кэ9Р ,
idS
где Т - усилие натяжения на средине рассматриваемого участка системы;. Д - изменение угла отклонения в слое, Оа. } aS - длина участка; е - средний угол отклонения от вертикали в слое.А,р {%-€,; 1/2/ К - коэффициент сопротивления
л
формы;
- эффективный диаметр участ эфка системы/
|) - плотность жидкости; п - количество датчиков . К- - коэффициент сопротивления
контейнеров датчиков/ S - площёщь миделя контейнера
датчика; К- - коэффициент сопротивления
трения,
m - номер слоя, на котором определяются параметры, U) - сила плавучести. Получают различные значения в)иг.4б) так как при различных галсах изменяется профиль линии (фиг. 2), потому что судно движется под различными углами к вектору истинного течения VY .
Определяют координаты х и у концов векторов Vj для каждой глубины, например, для глубины п 1 (в географических координатах) по углу Г с учетом расположения векторов течейия V в четвертях коордннат (фиг. 7). Для каждой глубины п, и П: (фиг. 8-10) , используя известные значения х и у для этих глубин, определяют координаты а н Е центра окружности по формулам
- )Ua.-S,)-(4-KVv V)CVV,) ° .,)-()):3 )Wa-4,V xa- tiMya-x% a-V) 2.CtJi-Va)W,,-yiV(Xa-XO(.Vi-V)3
Эти формулы используются потому, что установлено как бы не изменялись галсы судна при постоянной скорости и как бы от этого не изменился модуль и направление потока х, конец вектора V всегда лежит на окружности. Поэтому по трем известным точкам (координатам концов векторов V взятых на одной глубине) возможно построить окружность. Отсюда следует, что по предлагаемому способу для определения истинного течения VT достаточно трех галсов.
Пйд любым углом образующих ломаную линию.
Определяют модуль истинного течения Vf для каждой глубины (фиг. 8-10) по формуле
VT- Va + bS
так как было замечено, что вектор истинного течения V всегда выходит из центра географических координат О, и его конец лежит в точке 0.
Определяют направление истинного течения V (фиг. 8-10) по формуле
vf arctg (о(ь) ,
учитывая по знакам при а и в, в какой четверти координат лежит угол f . Если +в, ч-а, то Vy направлен относительно севера под углом f , так как А. Ч + М / V 0.
Если -в, +а, то Vf, направлен под углом Д., т.е. ) 90 + ; Ц) 90.
Если -в, -а, то V направлен под углом X 180 + 1 , так как Ч 180. Если +в, -а. то V направлен под углом Л 270+Ч , f 270.
Привязка параметров течения по глубине осуществляется по показаниям датчиков давления, которые дают глубину нахождения всех участков измерительной линии. Датчики давления могут быть в точках Лу, или С, ,(фиг. 2f пункт 3).
После измерений необходимых паоаметров для определения вектора V. распределенного по глубине, судно выполняет галсы и измерения в другом районе океана (или в точке полигона). После определения v , распределенного по глубине на участках (точках)(фиг. 12 и 13) всего выбранного полигона, строят поле течения, т.е. строят векторы по площади и вертикали полигона.
На фиг. 11 показан один из примеров определения V на глубине п при изменении галсов, в частности изменение галса i, на галс i. .
5 Полученные данные V показаны на фиг. 12 и 13.
Преимущество предлагаемого способа заключается в возможности на ходу судна, осуществляя минимальное
Q число галсов (три), определять параметры течения (модуль и нагфавление), распределенные по глубине, т.е. возможно получить эпюру течения, а также построить годограф скорости.
5 Параметры течения по глубине возможно получать в реальном масштабе времени, используя судовую ЭВМ, так как один конец кабель-троса гидрологической измерительной линии закреплен на судне и связан с бортовой аппаратурой, в структуру которой входит ЭВМ. Сокращается время съемки поля течения на исследуемом полигоне океана.
Галс it
фие. i
l/Sf f/Cfiffrtejritf ajf i//aif (pu9.3
/ff/fC t,
ь
л,,Ли.
Vsf
/7г
гэ
Пз
И
(pus Ц/h-ffc t-г


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения средних параметровТЕчЕНия HA ХОду СудНА | 1979 |
|
SU838577A1 |
| Буксируемый комплекс для измерения параметров течения | 1980 |
|
SU964541A1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2426154C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ ТЕЧЕНИЙ | 2003 |
|
RU2261460C2 |
| Способ определения скорости морского подводного течения | 2016 |
|
RU2622460C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПО ИЗМЕРЕНИЯМ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2550299C2 |

Пг
(рие.б
lf
Ж
Глубина /7/
Ж
/TI
фаг. 8
r y t/ffcf g
Галс1ц,
фцг. iZ
N
.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидрометеоиздат, 2-е изд | |||
| Л., 1977, с | |||
| Приспособление для удержания и защиты диафрагмы в микрофонной коробке | 1925 |
|
SU431A1 |
| Способ определения средних параметровТЕчЕНия HA ХОду СудНА | 1979 |
|
SU838577A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
