} « / о V г 102 .. Машина для укладки деревьев, включающая самоходное шасси, манипулятор, имекичий поворотную в вертикальной и горизонтальной плоскостях опору, в которой с возможностью возвратно-поступательного перемещения установлена балка с захватом, о т - л и ч а ю UI а я с я тем, что, балка снабжена приводной кареткой, а захват установлен на каретке и снабжен приводом его поворота относительно каретки, Зо Машина по п. 2, о тли ч .а ю1ц а я с я тем, что манипулятор снаб жен датчиком разжима захвата в месте укладки и возврата каретки в исходное положение. k. Машина по п. 2, о т л и ч а ющ а я с я тем, что, с целью уменьше ния массы конструкции и сохранения . грузовой устойчивости при укладке деревьев большого объема, балка снабжена элементом ее дополнительной фиксации. 5.Машина по пп. 2 и «t, отличающаяся тем, что элемент дополнительной фиксации балки выполнен поворотным. 6.Масиина по пп. 2 и i, о т л и чающаяся тем, что элемент дополнительной фиксации балки выполнен в виде захватного устройства. 7.Машина по пп. 2, JMG, отличающаяся тем, что балка снабжена датчиком разжима захватного устройства элемента дополнительной фиксации, который установлен на балке между датчиком разжима захвата и захватным устройством элемента дополнительной фиксации (алки.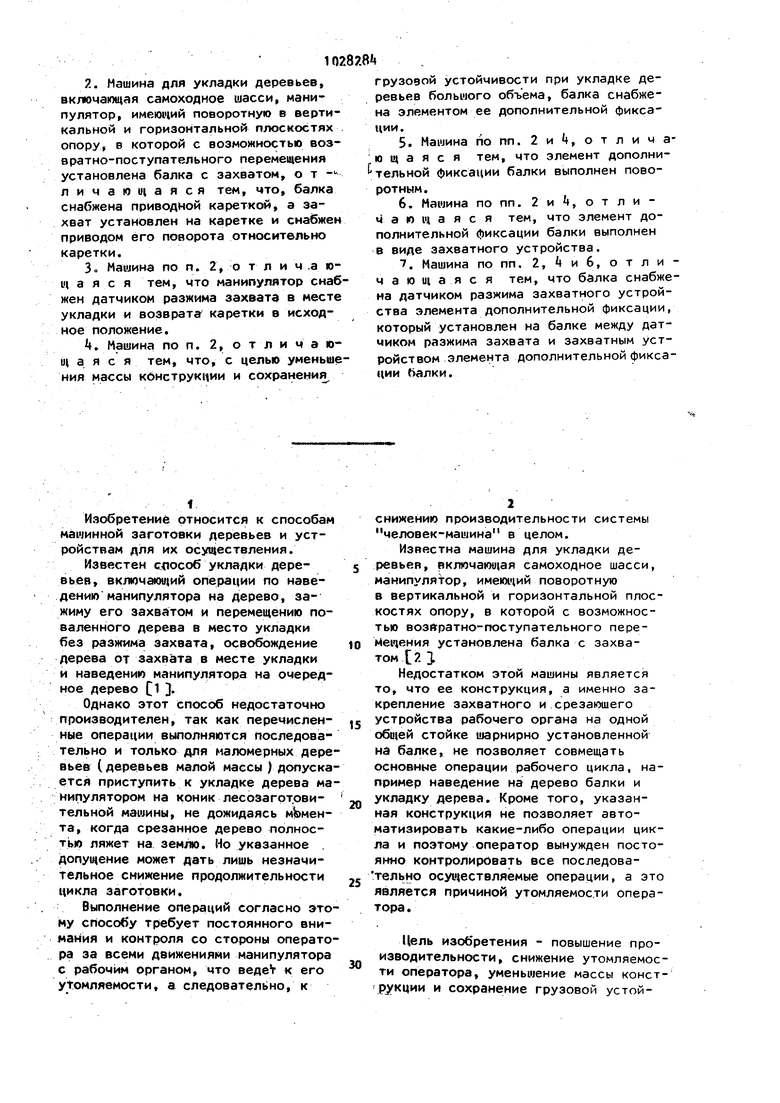
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВАЛКИ И ТРЕЛЕВКИ ДЕРЕВЬЕВ ВАЛОЧНО-ТРЕЛЕВОЧНОЙ МАШИНОЙ | 2012 |
|
RU2536627C2 |
| СПОСОБ НАПРАВЛЕННОЙ ВАЛКИ ДЕРЕВЬЕВ | 2013 |
|
RU2540544C2 |
| ВАЛОЧНО-ТРЕЛЕВОЧНАЯ МАШИНА | 1995 |
|
RU2105466C1 |
| Машина для валки деревьев | 1981 |
|
SU978784A1 |
| СПОСОБ РАСКРЯЖЕВКИ УЛОЖЕННЫХ В ШТАБЕЛЬ ДЕРЕВЬЕВ | 2014 |
|
RU2599563C2 |
| Захватно-срезающее устройство | 1977 |
|
SU716538A1 |
| Лесозаготовительная машина | 1983 |
|
SU1132856A1 |
| Валочно-треловочная машина | 1978 |
|
SU738554A1 |
| СПОСОБ ОБРАБОТКИ ДЕРЕВЬЕВ, СКЛАДИРОВАННЫХ В ШТАБЕЛЕ | 2023 |
|
RU2819280C1 |
| Манипулятор лесозаготовительной машины | 1990 |
|
SU1782920A1 |
к Способ укладки деревьев, включакнций операции по наведению манипулятора на дерево, зажиму его захватом манипулятора и перемещению поваленного дерева в место укладки без разжима захвата, освобомдение дерева от захвата в месте укладки и наведение манипулятора на очередное дерево, отличающийся тем, что, с целью повышения производительности и снижения утомляемости оператс ра, .наведение манипулятора на очередное дерево осуи(ествляют одновременно с перемещением поваленного дерева в место укладки.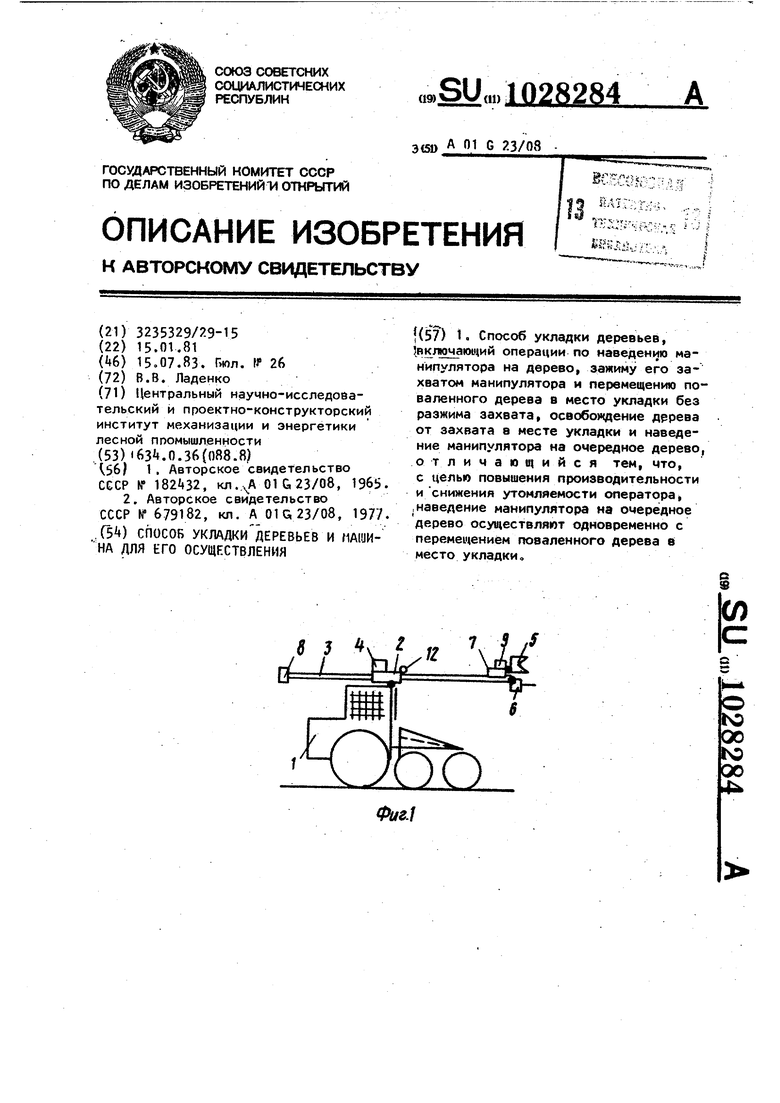
Изобретение относится к способам машинной заготовки деревьев и устройствам для их осуществления.
Известен слособ укладки деревьев, включаюи(ий операции по наведению манипулятора на дерево, зажиму его захватом и перемещению поваленного дерева в место укладки без г азжима захвата, освобождение дерева от захвата в месте укладки и наведению манипулятора на очередное дерево С
Однако этот способ недостаточно производителен, так как перечисленные опера11ии выполняются последовательно и только для маломерных деревьев (деревьев малой массы ) допускается приступить к укладке дерева манипулятором на коник лесозаготрвительной машины, не дожидаясь мЬмента, когда срезанное дерево полностью ляжет на землю. Но указанное допущение может дать лишь незначительное снижение продолжительности цикла заготовки.
Выполнение операций согласно этому способу требует постоянного внимания и контроля со стороны оператора за всеми движениями манипулятора с рабочим органом, что ведеУ к его утомляемости, а следовательно, к
снижению производительности системы человек-машина в целом.
Известна машина для укладки деревьев, включаюи(ая самоходное шасси, манипулятор, имею1ций поворотную в вертикальной и горизонтальной плоскостях опору, в которой с возможностью возйратно-поступательного переМещения установлена балка с захватом 2 1
Недостатком этой машины является то, что ее конструкция, а именно закрепление захватного и срезающего устройства рабочего органа на одной общей стойке шарнирно установленной ни балке, не позволяет совмещать основные операции рабочего цикла, например наведение на дерево балки и укладку дерева. Кроме того, указанная конструкция не позволяет автоматизировать какие-либо операции цикла и поэтому оператор вынужден постоянно контролировать все последова тельно осу1чествляемыб операции, а это является причиной утомляемости оператора.
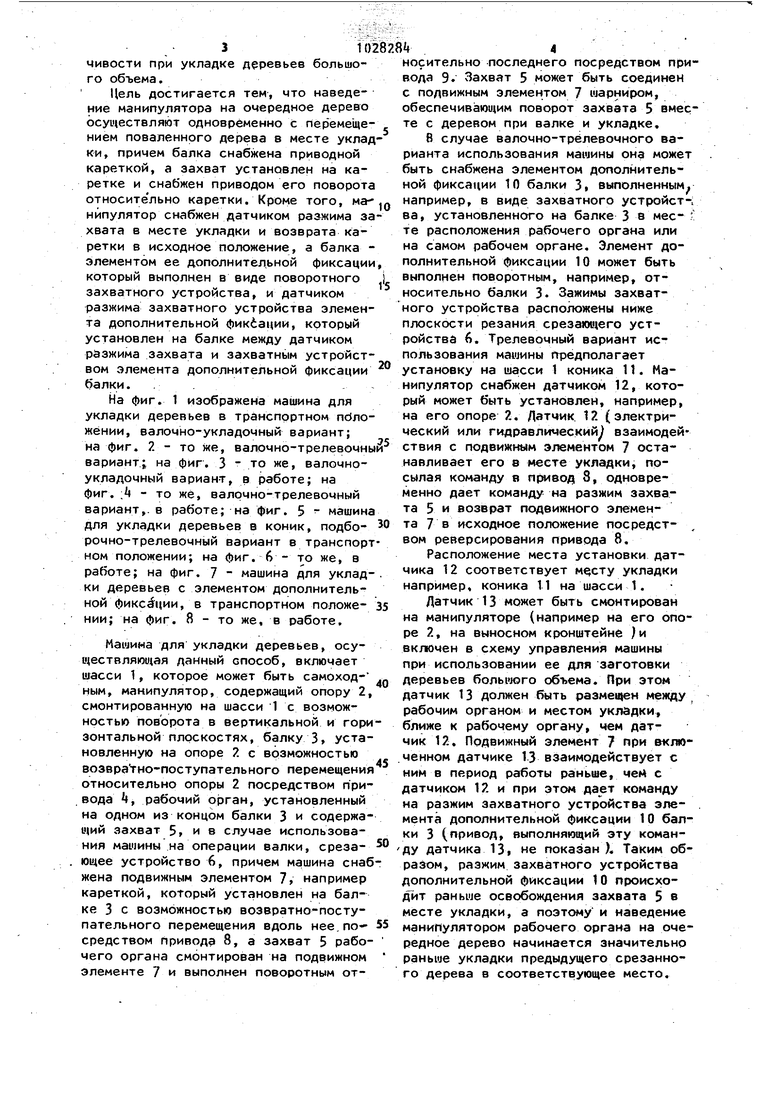
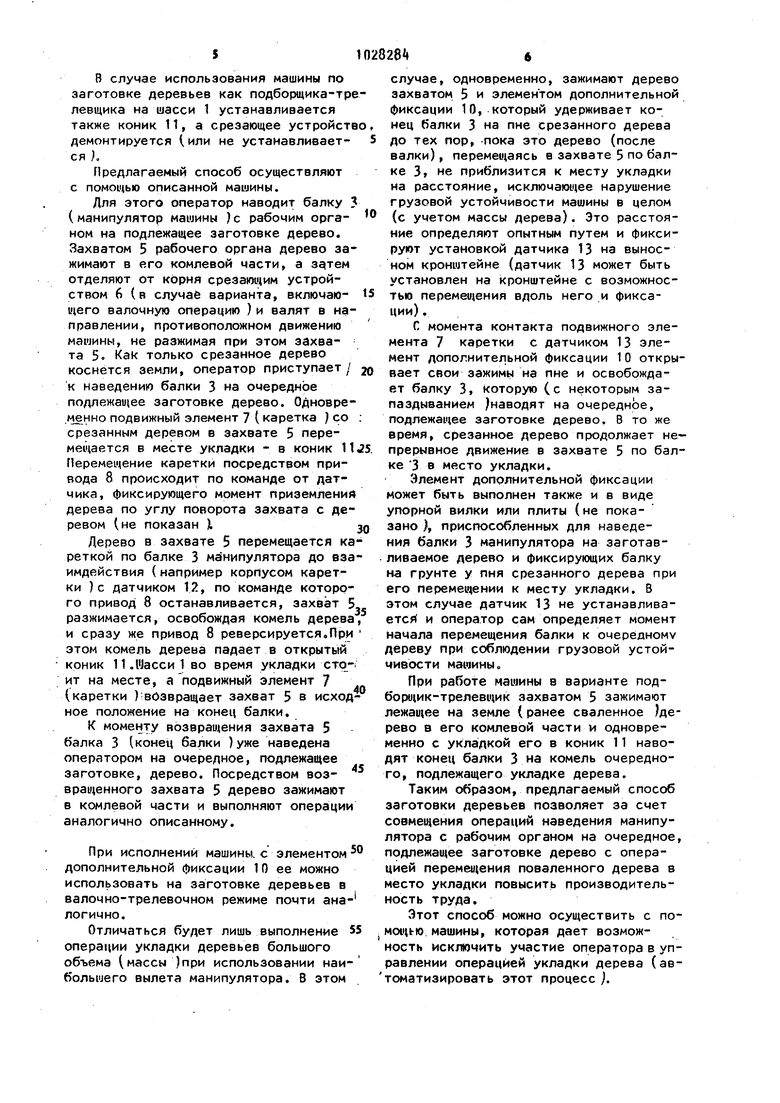
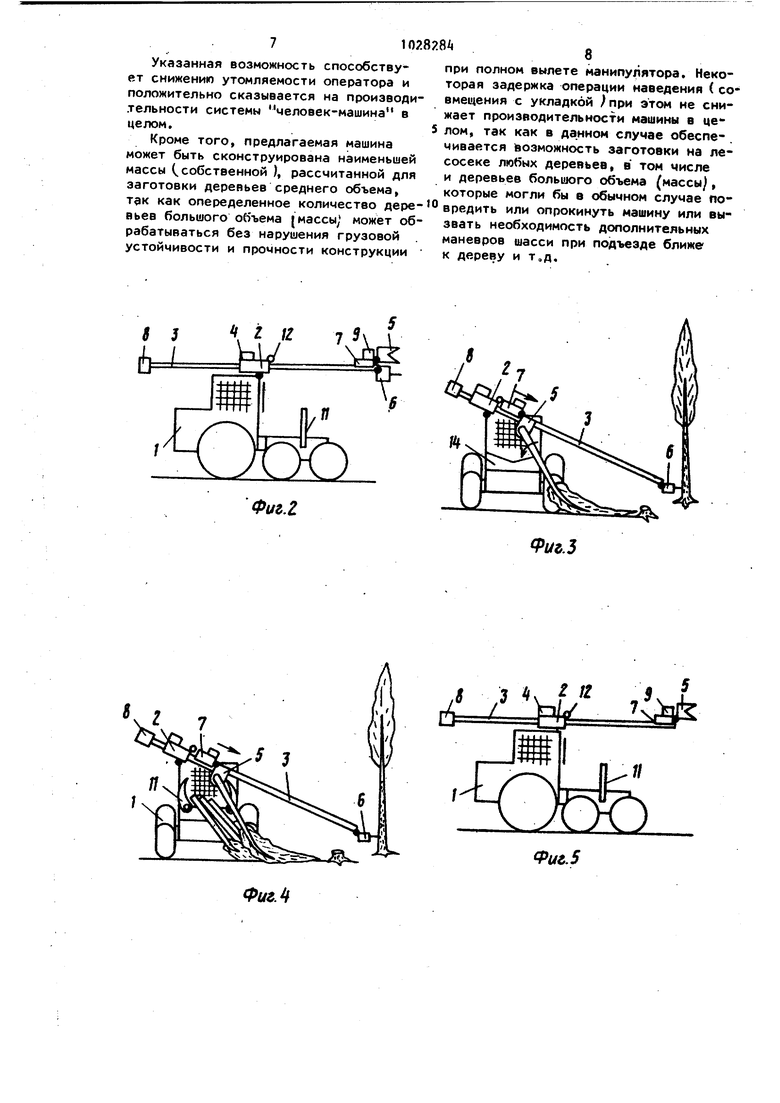
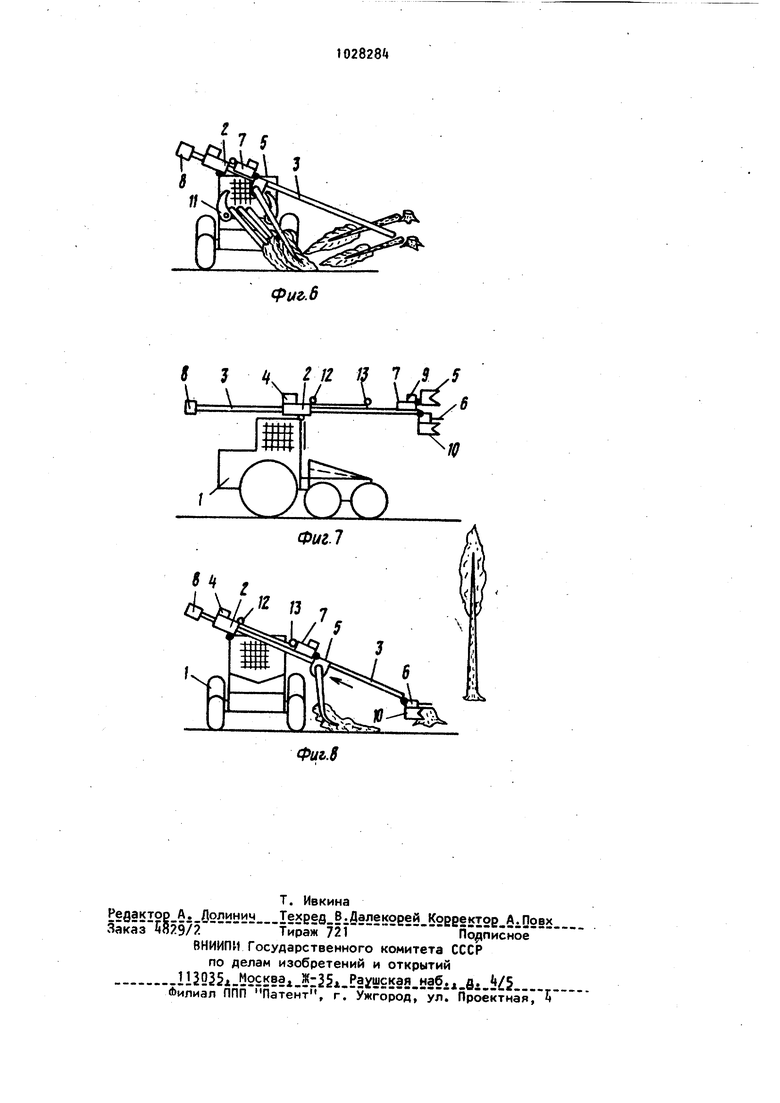
Цель изобретения - повышение производительности, снижение утомляемости оператора, уменьшение массы конструкции и сохранение грузовой устойчивости при укладке деревьев большого объема. Цель достигается тем, что наведение манипулятора на очередное дерево осуществляют одновременно с перемещением поваленного дерева в месте уклад ки, причем балка снабжена приводной кареткой, а захват установлен на каретке и снабжен приводом его поворота относительно каретки. Кроме того, манипулятор снабжен датчиком разжима за хвата в месте укладки и возврата каретки в исходное положение, а балка элементом ее дополнительной фиксации который выполнен в виде поворотного захватного устройства, и датчиком разжима захватного устройства элемента дополнительной фикбации, который установлен на балке между датчиком разжима захвата и захватнь1м устройством элемента дополнительной фиксации балки. .На фиг. 1 изображена машина для укладки деревьев в транспортном пбложёнии, валочно-укладочный вариант; на фиг, 2 - то же, валочно-трелевочны вариант; на фиг. 3 то же, валочноукладочный вариант, в работе; на фиг. :Ц - то же, валрчно-трелевочный вариант,, в работе; на фиг. 5 машина для укладки деревьев в коник, подборочно-трелевочный вариант в транспорт ном положении; на фиг. 6 - то же, в работе; на фиг. 7 машина для укладки деревьев с элементом дополнительной фиксации, в транспортном положении; на фиг. 8 - то же, в работе. Машина для укладки деревьев, осулчествляющая данный способ, включает шасси 1, которое может быть самоход- я ным, манипулятор, содержащий опору 2, смонтированную на шасси 1 с возможностью поворота в вертикальной и гори зонтальной плоскостях, балку 3 установленную на опоре 2 с возможностью возвратно-поступательного перемещения относительно опоры 2 посредством привода , рабочий о|эган, установленный на одном из концом балки 3 и содержащий захват 5, и в случае использования машины на операции валки, срезающее устройство 6, причем машина снаб жена подвижным элементом 7, например кареткой, который установлен на балке 3 с возможностью возвратно-поступательного перемещения вдоль нее. по- средством приводу 8, а захват 5 рабочего органа смонтирован на подвижном элементе 7 и выполнен поворотным относительно последнего посредством привода 9. Захват 5 может быть соединен с подвижным элементом 7 шарниром, обеспечивающим поворот захвата 5 вместе с деревом при валке и укладке, 8 случае валочно-трёлевочного варианта использования машины она может быть снабжена элементом дополнительной фиксации 10 балки 3 выполненным например, в виде захватного устройств ва, установленного на балке 3 в мес- -. те расположения рабочего органа или на самом рабочем органе. Элемент дополнительной фиксации 10 может быть выполнен поворотным, например, относительно балки 3. Зажимы захватного устройства расположены ниже плоскости резания срезаклцего устройства 6. Трелевочный вариант использования машины предполагает установку на шасси 1 коника 11. Манипулятор снабжен датчиком 12, который может быть установлен, например, на его опоре Я. Датчик. 12 (электрический или гидравлический) взаимодействия с подвижжйм элементом 7 останавливает его 8 месте укладки, посылая команду в привод 8, одновременно дает команду на разжим захвата 5 и возврат подвижного элемента 7 в исходное положение посредст- , вом реверсирования привода 8. Расположение места установки датчика 12 соответствует укладки например, коника 11 на шасси 1. Датчик 13 может быть смонтирован на манипуляторе (например на его опоре 2, на выносном кронштейне )и включен в схему управления машины при использовании ее для заготовки деревьев объема. При этом датчик 13 должен быть разме1цен между , рабочим органом и местом укладки, ближе к рабочему органу, чем датчик 12. Подвижный элемент 7 при включенном датчике 13 взаимодействует с ним в период работы раньше, чей с датчиком 12 и при этом дает команду на разжим захватного устройства элемента дополнительной фиксации 10 балки 3 (привод, выполняющий эту команду датчика 13, не показан ). Таким образом, разжим захватного устройства дополнительной фиксации 10 происход ит раньше освобождения захвата 5 в месте укладки, а поэтому и наведение манипулятором рабочего органа на очередное дерево начинается значительно раньше укладки предыдущего срезанного дерева в соответствующее место. В случае использования машины по заготовке деревьев как подборщика-тр левщика на шасси 1 устанавливается также коник 11, а срезающее устройст демонтируется (или не устанавливается ), Предлагаемый способ осуществляют с помощью описанной машины. Для этого оператор наводит балку (манипулятор машины )с рабочим органом на подлежащее заготовке дерево. Захватом 5 рабочего органа дерево за жимают в его комлевой части, а отделяют от корня срезающим устройством 6 (в случае варианта, включающего валочную операцию ) и валят в на правлении, противоположном движению машины, не разжимая при этом захвата 5. Как только срезанное дерево коснется земли, оператор приступает / к наведению балки 3 на очередное подлежаи(ее заготовке дерево. Одновре.менно подвижный элемент 7 ( каретка ) со срезанным деревом в захвате 5 перемещается в месте укладки - в коник 1 Перемещение каретки посредством привода 8 происходит по команде от датчика, фиксирующего момент приземлений дерева по углу поворота захвата с деревом (не показан Ц Дерево в захвате 5 перемещается ка реткой по балке 3 манипулятора до вза имдействия {например корпусом каретки )с датчиком 12, по команде которрГО привод 8 останавливается, захват 5 разжимается, освобождая комель дерева и сразу же привод 8 реверсируется,При этом комель дерева падает в открытый коник 11 ЛУасси 1 во время укладки стоит на месте, аподвижный элемент 7 (каретки )возвращает захват 5 в исход ное положение на конец балки. К моменту возвращения захвата 5 балка 3 (конец балки )уже наведена оператором на очередное, подлежащее заготовке, дерево. Посредством возвращенного захвата 5 дерево зажимают в комлевой части и выполняют операции аналогично описанному. При исполнений машины с элементом дополнительной фиксации 10 ее можно использовать на заготовке деревьев в валочно-трелевочном режиме почти аналогично. Отличаться будет лишь выполнение операции укладки деревьев большого объема (массы )при использовании наибольшего вылета манипулятора. В этом случае, одновременно, зажимают дерево захватом 5 и элементом дополнительной фиксации 10, который удерживает конец балки 3 на пне срезанного дерева до тех пор, пока это дерево (после валки), перемещаясь в захвате 5 по балке 3, не приблизится к месту укладки на расстояние, исключающее нарушение грузовой устойчивости машины в целом (с учетом массы дерева). Это расстояние определяют опытным путем и фиксируют установкой датчика 13 на выносном кронштейне (датчик 13 может быть установлен на кронштейне с возможностью перемещения вдоль него и фиксации) . С момента контакта подвижного элемента 7 каретки с датчиком 13 элемент дополнительной фиксации 10 открывает свои зажимы на пне и освобождает балку 3, которую (с некоторым запаздыванием наводят на очередное, подлежащее заготовке дерево. В то же время, срезанное дерево продолжает непрерывное движение в захвате 5 по балке 3 в место укладки. Элемент дополнительной фиксации может быть выполнен также и в виде упорной вилки или плиты (не показана I, приспособленных для наведения балки 3 манипулятора на заготавливаемое дерево и фиксирующих балку на грунте у пня срезанного дерева при его перемещении к месту укладки. В этом случае датчик 13 не устанавливаетс; и оператор сам определяет момент начала перемещения балки к очерёдному дереву при соблюдении грузовой устойчивости мтчины. При работе машины в варианте подборщик-трелевщик захватом 5 зажимают лежащее на земле (ранее сваленное )дерево в его комлевой части и одновременно с укла1дкой его в коник 11 наводят конец балки 3 на комель очередного, подлежащего укладке дерева. Таким образом, предлагаемый способ заготовки деревьев позволяет за счет совмещения операций наведения манипулятора с рабочим органом на очередное, подлежащее заготовке дерево с операцией перемеи(ения поваленного дерева в место укладки повысить производительность труда. Этот способ можно осуществить с поМО11(ЬЮ: машины, которая дает возможность исключить участие оператора в управлении операцией укладки дерева (автоматизировать этот процесс ), Указанная возможность способствует снижению утомляемости оператора и положительно сказывается на производительности системы человек-машина в целом. Кроме того, предлагаемая машина может быть сконструирована наименьшей массы (собственной ), рассчитанной для заготовки деревьев среднего объема, так как опеределенное количество деревьев большого объема (массы; может обрабатываться без нарушения грузовой . устойчивости и прочности конструкции при полном вылете манипулятора. Некоторая задержка операции наведения ( совмещения с укладкой )при этом не снижает производительности машины в це лом, так как в данном случае обеспе- . чивается {возможность заготовки на лесосеке любых деревьев, в том числе и деревьев большого объема (массы, которые могли бы в обычном случае повредить или опрокинуть машину или вызвать необходимость дополнительных маневров шасси при подъезде ближе к дереву и т,д.
г // 7
8 J
/
Фиг.2
v. 7
5 3
fut-S
.6
I j « г г
Ю
Фиг.7
Фи1.8
7 J ,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ выделения акрилонитрила | 1974 |
|
SU679132A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| .G) СНОСОВ УКЛАДКИ ДЕРЕВЬЕВ И МАШИНА для ЕГО ОСУЩЕСТВЛЕНИЯ | | |||
