Изобретение может быть использовано, в частности, в лесной промышленности.
Известен манипулятор лесозаготовительной машины, содержащий основание, смонтированное на нем опорное звено, шарнирно соединенную с последним стрелу с шарнирно сочлененной рукоятью, на конце которой установлен с возможностью поворота относительно нее рабочий орган с приводом его поворота, и гидроцилиндры поворота стрелы и рукояти, шарнирно установленные на опорном звене и соединенные соответственно со стрелой и рукоятью.
Однако конструкция такого манипулятора при переносе срезанного дерева из дальнего по отношению к шасси положения в, ближнее не обеспечивает вертикальности дерева и требует корректировки положения рабочего органа относительно рукояти, что вызывает значительные динамические нагрузки. В транспортном положении рабочий орган такого манипулятора располагается на значительном удалении от шасси, что при транспортировке приводит к значительным динамическим нагрузкам. С учетом этого эксплуатационные характеристики рассматриваемого манипулятора невысоки.
Целью изобретения является улучшение эксплуатационных характеристик манипулятора путем уменьшения динамических нагрузок при корректировке положения рабочего органа в процессе работы и перемещении манипулятора в транспортном положении.
Для достижения этой цели у манипулятора лесозаготовительной машины, содержащего основание, смонтированное на нем опорное звено, шарнирно соединенную с последним стрелу с шарнирно сочлененной рукоятью, на конце которой установлен с возможностью поворота относительно нее рабочий орган с приводом его поворота, и гидроцилиндры поворота стрелы и рукояти, шарнирно установленные на опорном звене
и соединенные соответственно со стрелой и рукоятью, опорное звено шарнирно соединено с основанием с возможностью поворота в плоскости, параллельной или
совпадающей с плоскостью поворота стрелы посредством установленного на основании гидроцилиндра.
При этом шарнирное соединение стрелы С опорным звеном расположено соосно с
шарнирным соединением последнего с основанием.
На фиг. 1 показан предлагаемый манипулятор при срезании, переносе и укладке дерева в формируемую пачку, а также зона
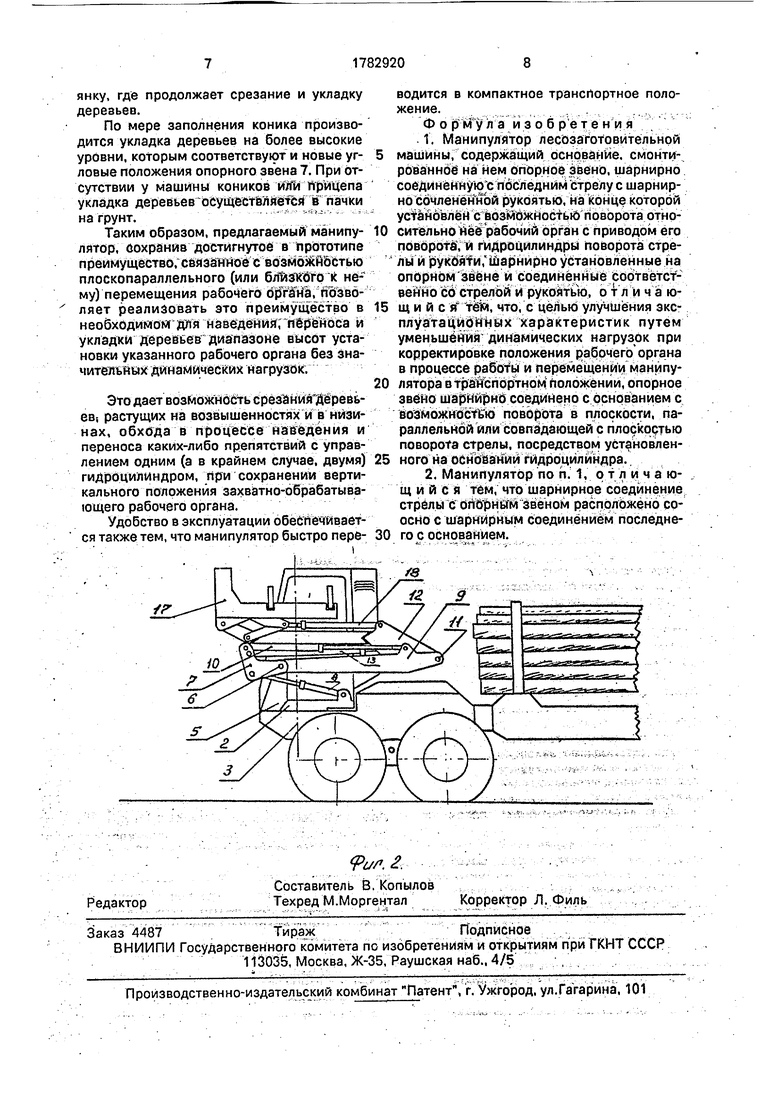
работы этого манипулятора; на фиг. 2 - машина с манипулятором в транспортном положении.
Предлагаемый манипулятор монтируют на поворотном относительно самоходного
шасси 1 основании 2 (на фиг. 1 показана вертикальная геометрическая ось 3 поворота основания 2 относительно шасси 1). Самоходное шасси 1 может иметь различную конструкцию. В частности, на чертежах показан вариант шарнирно сочлененного удлиненного шасси, предусматривающего установку на нем коников 4 для транспортировки деревьев в полностью погруженном положении. Конструкция самоходного шасси предусматривает установку на нем лишь одного устройства для удержания деревьев в полупогруженном положении. В случае, если лесозаготовительная машина не предназначена для транспортировки срезаемых
деревьев, самоходное шасси не оборудуется устройствами для удержания деревьев. На основании 2 установлены, например, кронштейны 5. На кронштейнах 5 посредством оси 6 установлено опорное звено 7 с
возможностью поворота вокруг этой оси посредством привода, например одного или нескольких гидроцилиндров 8.
На тех же кронштейнах 5 с возможностью поворота в плоскости, параллельной
5 17829206
плоскости поворота опорного звена 7, мо-в конструкции манипулятора подобраны
жет быть смонтирована стрела 9. В частном,расстояния между осями 11 и 15 и между
наиболее простом и надёжном варианте,осями 6 и 14, а также длина стрелы (т.е.
изображенном на чертежах, ось поворотарасстояние между осями 6и 11)идлинахода
стрелы 9 совпадает (или соосна) с осью по-5 гидроцилиндра 13.
ворота 6 опорного звена 7. Стрела 9 с воз-Работа предлагаемого манипулятора можностью поворота в той же плоскостиможет быть рассмотрена в случае установки может быть посредством оси шарнирно ус-его на валочно-транспортной машине. При тановлена и на опорном звене 7. Для пово-переездах машины манипулятор должен рота стрелы манипулятор снабжен10 быть уложен в транспортное положение гидроцилиндром 10, одна из вэаимопод-(фиг. 2), при этом гидроцилиндры 8 и 18 вижных частей которого шарнирно закреп-вытянуты, а гидроцилиндры 13 и 18 втянуты, лена на опорном звене 7, а другая - наМанипулятор в таком положении представ- стреле 9. Противоположный опорному зве-ляет собой компактную конструкцию, в кону 7 (или основанию 2) конец стрелы шар-15 торой при перемещении машины нирно подсоединен (посредством оси 11) квозникают инерционные нагрузки, значи- рукояти 12, для поворота которой установ-тельноменьшие,чемуманипулятора-прото- лен гидроцилиндр 13. При этом одна из еготипа.
взаимоподвижных частей шарнирно за-Оператор устанавливает машину в нача- креплена на опорном звене 7 посредством20 ле подлежащей разработке ленты. С no- оси 14. а другая - посредством оси 15 намощью гидроцилиндров 8, 10, 13. 18 он рукояти 12.переводит манипулятор из транспортного -Возможен вариант, при котором оси по-положения в рабочее и наводит захватно- ворота гидроцилиндров 10 и 13 относитель-обрабатывающий рабочий орган 17 на дере- но опорного звена 7 соосны или совпадают.25 во. Если дерево растет на возвышении или На конце рукояти 12 посредством оси 16в яме по отношению к опорной поверхности шарнирно закреплен корпус захватно-обра-шасси машины, то оператор в процессе на- батывающего рабочего органа 17. Для пово-ведения на него использует гидроцилиндр рота этого органа в плоскости поворота8; в остальных случаях он может и не исполь- рукояти 12 установлен привод, например30 зовать этот гидроцилиндр, наводя манипу- гидроцилиндр 18, одна из взаимоподвиж-лятор только с помощью гидроцилиндров 13 ных частей которого шарнирно закрепленаи 18. Далее оператор зажимает дерево за- на рукояти 12, а другая с помощью шарнирахватами и с помощью срезающего механиз- 19 подсоединена к звеньям 20,21; послед-ма (не показан) рабочего органа 17 срезает ние свободными концами шарнирно связа-35 его. После этого дерево в вертикальном по- ны соответственно с корпусом органа 17 иложении переносится к шасси. Отклонения рукоятью 12. Захватно-обрабатывающийдерева с рабочим органом 17 от вертикаль- рабочий орган 17 может быть различным вкого положения при таком переносе легко зависимости от объема фукнций, выполняв-ликвидируются гидроцилиндром 8, не вызы- мых машиной. В частности, если машина40 вая серьезных динамических нагрузок на валочно-пакетирующая или валочно-трелё-манипулятор.
вочная, в качестве этого органа на манипу-После плоскопараллельного (или близляторе установлено захватно-срезающеекого к нему) переноса дерева поворотом осустройство: если машина валочно-сучкорез-нования 2 вокруг оси 3 посредством
нал, валочно-сучкорезно-трелевочная, то в45 привода (не показан) оператор переводит
качестве органа 17 на манипуляторе уста-манипулятор с деревом в зону.укладки,
новлено захватно-сучкорезно-срезающееограниченную стойками коников 4. Затем
устройство и т.д.гидроцилиндром 18 оператор поворачиваКонструкция предлагаемого манипу-ет орган 17 с деревом вокруг оси 16 и в
лятора, как и манипулятора-прототипа,50 конце этого поворота освобождает дерево
должна обеспечивать возможность пло-из захватов органа 17. Дерево укладываскопараллельного (или с небольшими от-ется, таким образом, на основания кониклонениями от него) перемещения рабочегоков 4. Далее оператор переводит
органа 17. В связи с этим в процессе пово-манипулятор в исходное положение и осурота стрелы 9 должно быть обеспечено55 ществляет наводку органа 17 на очередное
близкое к параллельному (а в частных случа-дерево. Циклы: наводка - зажим - срезаях и параллельное) относительное перёме- ние - перенос - укладка повторяются до
щение продольной оси гидроцилиндра 13 иукладки в коник всех деревьев, срезанных
плоскости, проходящей через оси 6 и 11. Изс одной стоянки. Затем оператор перемеусловия возможности такого перемещениящает машину на следующую рабочую стоянку, где продолжает срезание и укладку деревьев.
По мере заполнения коника производится укладка деревьев на более высокие уровни, которым соответствуют и новые угловые положения опорного звена 7. При отсутствии у машины коников ил и прицепа укладка деревьев осуществляется 8 пачки на грунт.
Таким образом, предлагаемый манипулятор, сохранив достигнутое в прототипе преимущество, связанное с возможностью плоскопараллельного (или блТШбго к нему) перемещения рабочего opYa ria, позво- ляет реализовать это преимущество в необходимом для наведения, переноса и укладки деревьев диапазоне высот установки указанного рабочего органа без значительных динамических нагрузок.
Это дает возможность срезания Деревь- ев, растущих на возвышенностях и в низинах, обхода в процессе наведения и переноса каких-либо препятствий с управлением одним (а в крайнем случае, двумя) гидроцилиндром, при сохранении вертикального положения захватно-обрабатыва- ющего рабочего органа.
Удобство в эксплуатации обеспечивается также тем, что манипулятор быстро переводится в компактное транспортное положение.
Формула изобретения
1,Манипулятор лесозаготовительной машины, содержащий основание, смонтированное на нем опорное звено, шарнирно соединенную последним стрелу с шарнирно сочлененной рукоятью, на конце которой установлен с возможностью поворота относительно нес рабочий орган с приводом его поворота, и гидроцилиндры поворота стрелы и рукОяти,1 шарнирно установленные на опорном звене и соединенные соответственно со стрелой и рукоятью, отличающ и и с я тем, что, с целью улучшения эксплуатационных характеристик путем уменьшения динамических нагрузок при корректировке положения рабочего органа в процессе работы и перемещении манипулятора в транспортном положении, опорное звено шарнирно соединено с основанием с возможностью поворота в плоскости, параллельной или совпадающей с плоскостью поворота стрелы, посредством установленного на основании гидроцилиндра.
2.Манипулятор по п. 1, отличающийся тем, что шарнирное соединение стрелы с опорным звеном расположено со- осно с шарнирным соединением последиего с основанием.

| название | год | авторы | номер документа |
|---|---|---|---|
| Лесозаготовительная машина | 1982 |
|
SU1080791A1 |
| ЗАХВАТНО-СРЕЗАЮЩЕЕ УСТРОЙСТВО ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2529159C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1998 |
|
RU2130249C1 |
| СПОСОБ НАПРАВЛЕННОЙ ВАЛКИ ДЕРЕВЬЕВ | 2013 |
|
RU2540544C2 |
| Валочно-пакетирующая машина | 1971 |
|
SU409681A1 |
| Лесозаготовительная машина | 1983 |
|
SU1159515A1 |
| СПОСОБ РАСКРЯЖЕВКИ УЛОЖЕННЫХ В ШТАБЕЛЬ ДЕРЕВЬЕВ | 2014 |
|
RU2599563C2 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2002 |
|
RU2202877C1 |
| Транспортное средство для формирования и перевозки пачки длинномерных грузов | 1981 |
|
SU988608A1 |
| Лесозаготовительная машина | 1983 |
|
SU1148592A1 |
Изобретение может быть особенно эффективно использовано на машинах, работающих по методу накопления пачки лесоматериалов определенного объема. Манипулятор монтируют, например, на валоч- но-транспортной машине. Оператор устанавливает машину в начале разрабатываемой ленты. С помощью гидроцилиндров 8,10,13,18 он переводит манипулятор из транспортного положения в рабочее и наводит захватно-обрабатываю- щий орган 17 на дерево. При этом использование гидроцилиндра 8 подъема опорного звена 7 осуществляется ори нахождении дерева на возвышении или в яме по отношению к опорной поверхности шасси машины; в остальных случаях наводка манипулятора может происходить только с помощью гид- роцшшидров 13,18. Далее дерево зажимается и срезается, после чего в вертикальном л
| Стрела лесозаготовительной машины | 1973 |
|
SU522766A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
