2о Стенд по п. 1, о т л и ч а ю щ и и с я тем, что упомянутый датчик снабжен конечными выключателями, управляемыми маятником в среднем и край- них его положениях и включенными в цепь управления золотником и распределителем.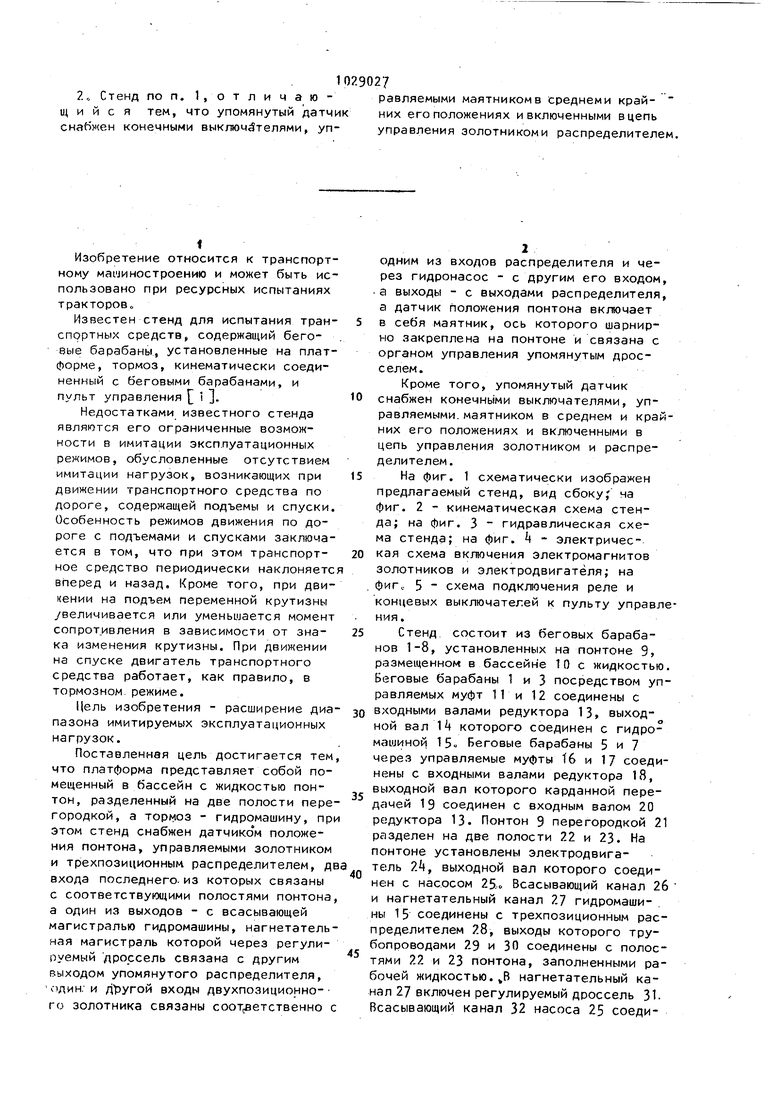
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания самоходных корнеклубнеуборочных машин и имитатор нагрузок на копатели корнеклубнеуборочных машин | 1982 |
|
SU1092370A1 |
| Стенд для испытания транспортных средств | 1981 |
|
SU962782A1 |
| Стенд для испытания самоходных машин | 1988 |
|
SU1555632A1 |
| Стенд для испытания транспортных средств | 1982 |
|
SU1032346A1 |
| Стенд для динамических испытаний рукавов | 1990 |
|
SU1828959A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1991 |
|
RU2030727C1 |
| Система управления гидравлическим рекуператором энергии торможения транспортного средства | 1977 |
|
SU743903A1 |
| Тормозная система транспортного средства | 1980 |
|
SU893638A1 |
| Способ испытания колесных транспортных средств и стенд для его осуществления | 1982 |
|
SU1146566A1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
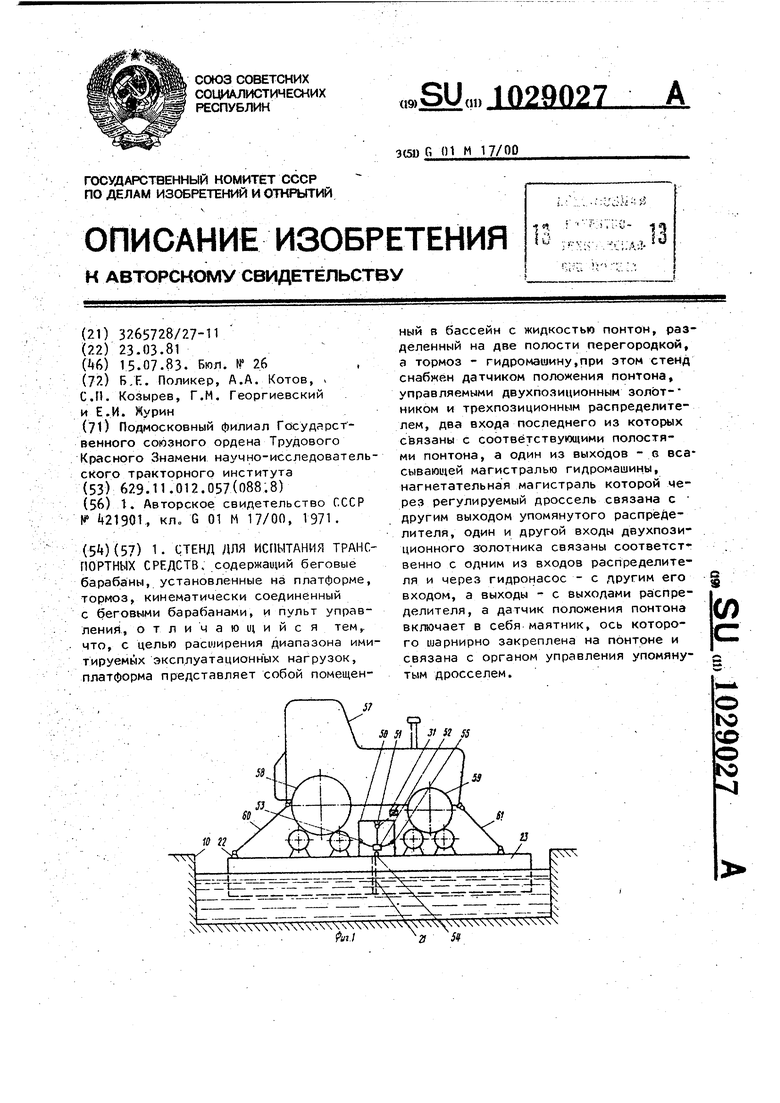
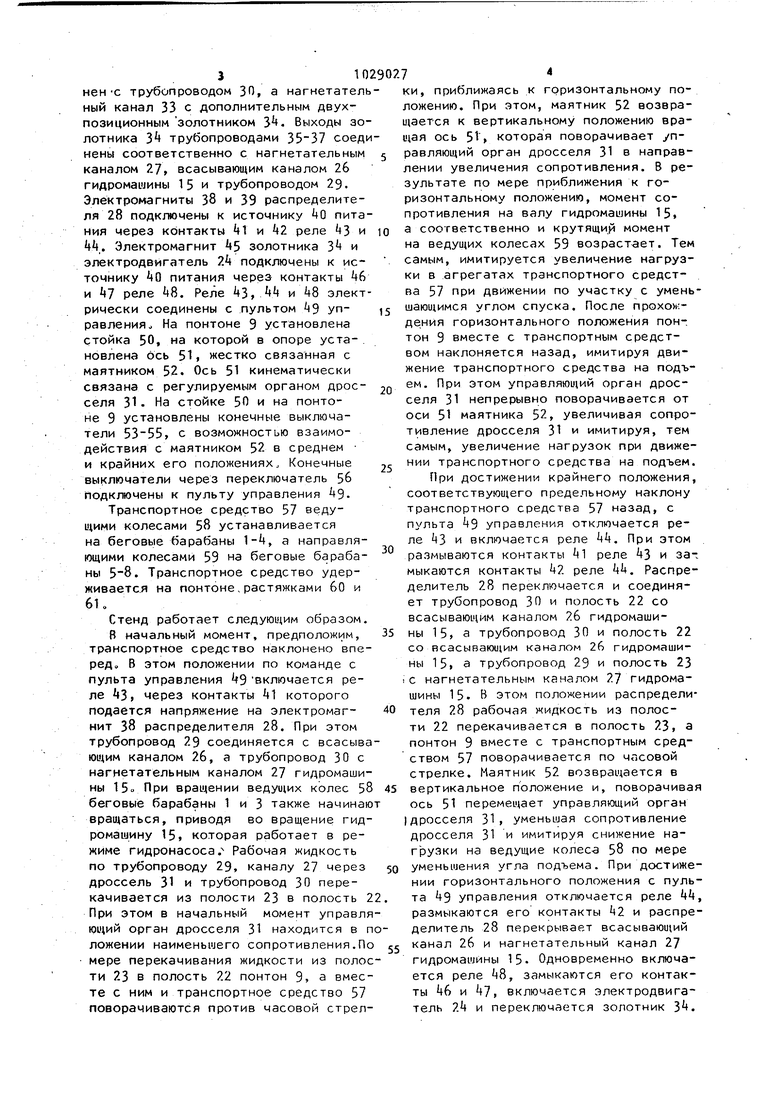
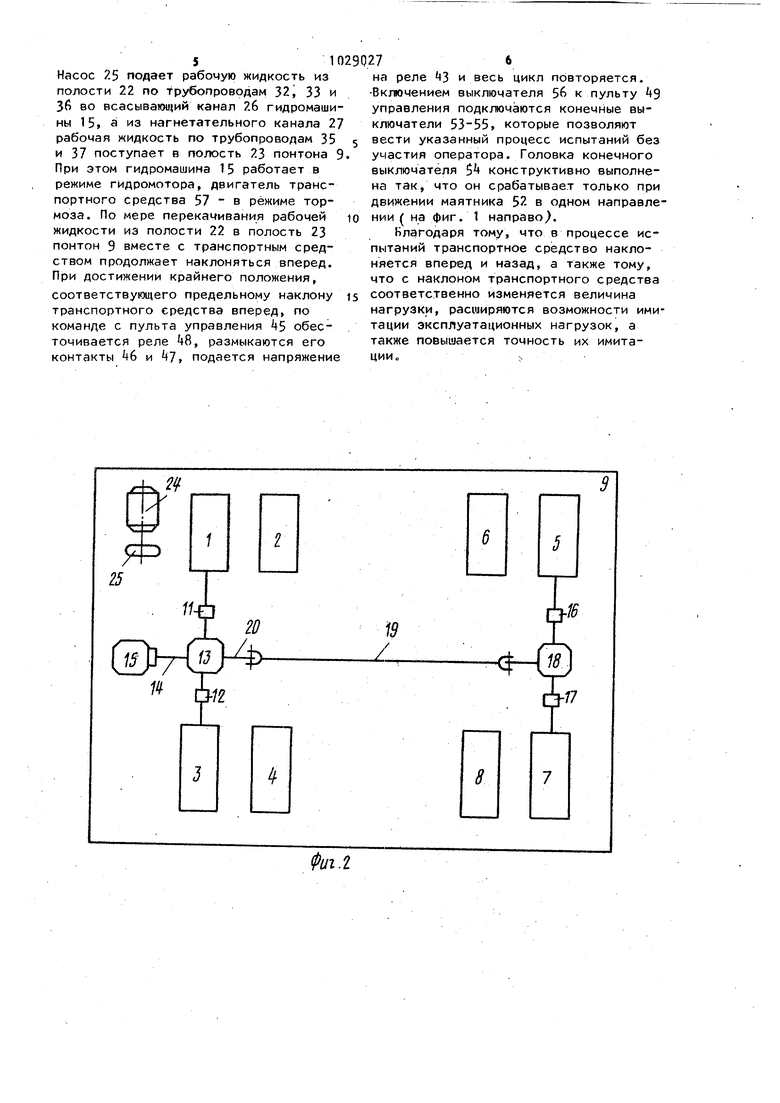
Изобретение относится к транспортному машиностроению и может быть использовано при ресурсных испытаниях тракторов. Известен стенд для испытания транспортных средств, содержащий беговые барабаны, установленные на платформе, тормоз, кинематически соединенный с беговыми барабанами, и пульт управления | i . Недостатками известного стенда являются его ограниченные возможности в имитации эксплуатационных режимов, обусловленные отсутствием имитации нагрузок, возникающих при движении транспортного средства по дороге, содержащей подъемы и спуски Особенность режимов движения по дороге с подъемами и спусками заключается в том, что при этом транспортное средство периодически наклоняетс вперед и назад. Кроме того, при двикении на подъем переменной крутизны увеличивается или уменьшается момент сопротивления в зависимости от знака изменения крутизны. При движении на спуске двигатель транспортного средства работает, как правило, в тормозном, режиме. Цель изобретения - расширение диа пазона имитируемых эксплуатационных нагрузок. Поставленная цель достигается тем что платформа представляет собой помещенный в бассейн с жидкостью понтон, разделенный на две полости пере городкой, а тормоз - гидромашину, пр этом стенд снабжен датчикам положения понтона, управляемыми золотником и трехпозиционныи распределителем, д входа последнего, из которых связаны с соответствующими полостями понтона а один из выходов - с всасывающей магистралью гидромашины, нагнетатель ная магистраль которой через регулируемый дроссель связана с другим выходом упомянутого распределителя, один, и другой входы двухпозиционного золотника связаны соот5ветственно одним из входов распределителя и через гидронасос - с другим его входом, а выходы - с выходами распределителя, а датчик Положения понтона включает в себя маятник, ось которого шарнирно закреплена на понтоне и связана с органом управления упомянутым дросселем. Кроме того, упомянутый датчик снабжен конечными выключателями, управляемыми, маятником в среднем и крайних его положениях и включенными в цепь управления золотником и распределителем. На фиг. 1 схематически изображен предлагаемый стенд, вид сбоку; на фиг. 2 - кинематическая схема стенда; на фиг. 3 - гидравлическая схема стенда; на фиг. h - электрическая схема включения электромагнитов золотников и электродвигателя; на фиг. 5 - схема подключения реле и концевых выключателей к пульту управления . Стенд состоит из беговых барабанов 1-8, установленных на понтоне 9, размещенном в бассейне 10 с жидкостью. Беговые барабаны 1 и 3 посредством управляемых муфт 11 и 12 соединены с входными валами редуктора 13, выходной вал 14 которого соединен с гидромашиной 15о Беговые барабаны 5 и 7 через управляемые муфты 16 и 17 соединены с входными валами редуктора 18, выходной вал которого карданной передачей 19 соединен с входным валом 20 редуктора 13. Понтон 9 перегородкой 21 разделен на две полости 22 и 23. На понтоне установлены электродвигатель .А, выходной вал которого соединен с насосом 25. Всасывающий канал 26 и нагнетательный канал 27 гидромашины 15 соединены с трехпозиционным распределителем 28, выходы которого трубопроводами 29 и 30 соединены с полостями 22 и 23 понтона, заполненными рабочей жидкостью.В нагнетательный канал 27 включен регулируемый дроссель 31Всасывающий канал 32 насоса 25 соединенС трубопроводом ЗП, а нагнетатель ный канал 33 с дополнительным двухпозиционным золотником 3. Выходы золотника 3 трубопроводами соед нены соответственно с нагнетательным каналом 27, всасывающим каналом 26 гидромашины 15 и трубопроводом 29. Электромагниты 38 и 39 распределителя 28 подключены к источнику 40 пита ния через контакты 1 и 42 реле 3 и 4А. Электромагнит 5 золотника 3+ и электродвигатель .k подключены к источнику 40 питания через контакты 46 и 47 реле 48. Реле 43, 44 и 48 элект рически соединены с пультом 49 управления На понтоне 9 установлена стойка 50. на которой в опоре уста- . новлена ось 51, жестко связанная с маятником 52. Ось 51 кинематически связана с регулируемым органом дросселя 31 На стойке 50 и на понтоне 9 установлены конечные выключатели , с возможностью взаимодействия с маятником 52 в среднем и крайних его положениях. Конечные выключатели через переключатель 5б подключены к пульту управления 49Транспортное средство 57 ведущими колесами 58 устанавливается на беговые барабаны 1-4, а направляющими колесами 59 на беговые барабаны . Транспортное средство удерживается на понтоне,растяжками 60 и 61. Стенд работает следующим образом, В начальный момент, предположим, транспортное средство наклонено вперед, В этом положении по команде с пульта управления 49 включается реле 43, через контакты 41 которого подается напряжение на электромагнит 38 распределителя 28. При этом трубопровод 29 соединяется с всасыва ющим каналом 26, а трубопровод 30 с нагнетательным каналом 27 гидромашины 15о При вращении ведущих колес 58 беговые барабаны 1 и 3 также начинаю вращаться, приводя во вращение гидромашину 15, которая работает в режиме гидронасоса. Рабочая жидкость по трубопроводу 29, каналу 27 через дроссель 31 и трубопровод 30 перекачивается из полости 23 в полость 2 При этом в начальный момент управля ющий орган дросселя 31 находится в п ложении наименьшего сопротивления.По мере перекачивания жидкости из полос ти 23 в полость 22 понтон 9, а вместе с ним и транспортное средство 57 поворачиваются против часовой стрелки, приближаясь к горизонтальному положению. При этом, маятник 52 возвращается к вертикальному положению вращая ось 51 которая поворачивает управляющий орган дросселя 31 в направлении увеличения сопротивления. В результате по мере приближения к горизонтальному положению, момент сопротивления на валу гидромашинь 15 а соответственно и крутящий момент на ведущих колесах 59 возрастает. Тем самым, имитируется увеличение нагрузки в агрегатах транспортного средства 57 при движении по участку с уменьшающимся углом спуска. После прохох:де.ния горизонтального положения понтон 9 вместе с транспортным средством наклоняется назад, имитируя движение транспортного средства на подъем. При этом управляюи1ий орган дросселя 31 непрерывно поворачивается от оси 51 маятника 52, увеличивая сопротивление дросселя 31 и имитируя, тем самым, увеличение нагрузок при движении транспортного средства на подъем. При достижении крайнего положения, соответствующего предельному наклону транспортного средства 57 назад, с пульта 49 управления отключается реле 43 и включается реле 44. При этом размываются контакты 41 реле 43 и за-, мыкаются контакты 42 реле 44. Распределитель 28 переключается и соединяет трубопровод ЗП и полость 22 со всасывающим каналом 2б гидромашины 15, а трубопровод 30 и полость 22 со всасываюи им каналом 26 гидромашины 15, а трубопровод 29 и полость 23 c нагнетательным каналом 27 гидромашины 15. В этом положении распределителя 28 рабочая жидкость из полости 22 перекачивается в полость 23, а понтон 9 вместе с транспортным средством 57 поворачивается по часовой стрелке. Маятник 52 возвращается в вертикальное положение и, поворачивая ось 51 перемещает управляющий орган I дросселя 31, уменьшая сопротивление дросселя 31 и имитируя снижение нагрузки на ведущие колес-а 58 по мере уменьшения угла подъема. При достижении горизонтального положения с пульта 49 управления отключается реле 44, размыкаются его контакты 42 и распределитель 28 перекрывает всасываюи|ий канал 2б и нагнетательный канал 27 гидромашины 15. Одновременно включается реле 48, замыкаются его контакты 46 и 47, включается электродвига тель 24 и переключается золотник 34.
Насос 25 подает рабочую жидкость из полости 22 по трубопроводам 32j 33 и Зб во всасывающий канал 2б гидромашины 15 а из нагнетательного канала 27 рабочая жидкость по трубопроводам 35 и 37 поступает в полость 23 понтона 9 При этом гидромашина 15 работает в режиме гидромотора, двигатель транспортного средства 57 - в режиме тормоза. По мере перекачивания рабочей жидкости из полости 22 в полость 23 понтон 9 вместе с транспортным средством продолжает наклоняться вперед. При достижении крайнего положения, соответствущего предельному наклону транспортного средства вперед, по команде с пульта управления kS обесточивается реле 48, размыкаются его контакты 6 и 7, подается напряжение
на реле 43 и весь цикл повторяется. -Вкт)чением выключателя 5б к пульту S управления подключаются конечные выключатели , которые позволяют вести указанный процесс испытаний без участия оператора. Головка конечного выключателя 5 конструктивно выполнена так, что он срабатывает только при движении маятника 52 в одном направлении ( на фиг. 1 направо.
благодаря тому, что в процессе испытаний транспортное средство наклоняется вперед и назад, а также тому, что с наклоном транспортного средства соответственно изменяется величина нагрузки, расширяются возможности имитации эксплуатационных нагрузок, а также повышается точность их имитации „:,
дЗ 45
т
11-2
41
Г гГТ
7
4
| Л | |||
| Способ изготовления абсорбционного и катализационного вещества из угля | 1925 |
|
SU21901A1 |
