ff Изобретение относится к гндроавтома тике и может быть использовано в элек-ь рогидравлических системах подъемнотраиспортных машин, станков и промышленных роботов. Известен гидравлический привод объем ного регулирования, содержащий последовательно связанные сумматор, электронн усилитель, электрогидравлический усилитель и гидродвигатели поворота регулирую щего органа насоса, соединенного гидроли ниями с испол1штельным гидродвигателем, датчик скорости поворота регулирующего органа, подключенный к сумматору Недостатками этого привода $шляются низкие точность и надежность вслед.ствие зависимости скорости и угла ловорота регулирующего органа от величины . момента на регулирующем органе. Известен также гидравлический привод объемного регулирования, содержавш последовательно связанные первый и вто рой сумматоры, электронный усилитель, электрогидравлический усилитель и гид-родвигатели поворота регулирующего органа насоса, соединенного гидролиниями с исполнительными гидродвигателём, датчик перепада давлений в гидролиниях, связанный с положительным входом второго сумматора, датчик угла поворота регулирующего органа, подключенный к отрицательному входу одного из суммато ров, и датчик скорости поворота регулирующего органа, подключе шый к одному из входов второго суМматрра 12 3 , Недостатками известного привода 5шляют ся низкие быстродействие и точность из-за того, что в нем обеспечивается компенсация части скоростной составляющей возмущающего момента на регулирующем органе. Целью изобретения является повьпие- ние быстродействия и точности. Указанная uejjb достигается тем, что гидравлический привод объемного регулирования, содержащий последовательно связанные первый и второй сумматоры, электронный усилитель, электрогидравлический усилитель и гидродвигатели поворота регулирующего органа насоса, соединенного гидролиниями с исполнитель ным гидродвигателем, датчик перепада давлений в гидролиниях, связанный с положительным входом второго сумматора, датчик угла поворота регулирующего органа, подключенный к отрицательному входу одного из сумматоров, и датчик скорости поворота регулирующего органа. подключенный к одному из входов второго сумматора, снабжен блоком умножения, первым преобразователем с передаточной функцией типа кусочно-линейной сигнатуры со скачком в начале координат и вторым преобразователем с не етной степенной передаточной функцией, причем датчик перепада давлений подключен к одному из входов блока умножения, который связан с положительным входом сумматора, датчик угла поворота подключен к второму входу блока умножения через первый преобразователь, а датчик скорости поворота подключен к положительному входу второго сумматора через второй преобразователь. На чертеже изображена схема гидравлического привода объемного регулирования. Привод содержит последовательно связанные первый 1, второй сумматор 2, элейтронный усилитель 3, электрогидравлический усилитель 4 и гидродвигатели 5 и 6 поворота регулирующего органа 7 насоса 8, соединенного гидролиниями 9 и 10 с исполнительным гидродвигателём 11, датчик 12 перепада давлений в гидролиниях 9 и 10, датчик угла поворота регулирующего органа 7, выполненный в виде вращающегося трансформатора 13, подключенного к отрицательному входу сумматора 1, датчик скорости поворота регулирующего органа 7, вьшолненный в виде тахогенератора 14, первый преобразователь 15 с передаточной функцией типа кусочно- 1инейной сигнатуры со скачком в начале координат, второй преобразователь 16 с нечетной степенной передаточной функцией, например, третьей степени, и блок 17 умножения. При этом датчик 12 подключен к одному из входов блока 17, который связан с положительным входом сумматора 2, вращающийся трансформатор 15 подключен ко второму входу блока 17 через преобразователь 15, а тахогенератор 14 подключен к положительному входу сумматора 2 через преобразователь 16. Гидравлический привод объемного регулирования работает следующим образом. Задающий сигнал подается на сумматор 1, в виде сигнала рассогласования поступает на сумматор 2 и далее через усилитель 3 - на усилитель 4, управляющий перемещением гидродвигателей 5,6 к регулирующего органа 7 насоса 8. В зависимости от угла и скорости поворо310та регулирующего органа 7 в гидроли-ниях 9 и 10 возникает перепад давлеНИИ, а на регулирующем органе 7 - вой- мущающий момент, противодействующий отработке сигнала рассогласования, который может быть описан выражением . М (Q5igHr -l -,r) ДР+К аГ, где У - угол поворота регулирующего органа 7; у - скорость поворота регулирующего органа 7; Др - перепад давлений в гидролиниях 9 и 10; ,-. 1 1/ - коэффициенты пропорциональное I 2 . Величина возмущающего момента определяет ощибку и быстродействие привода. Датчик 12 формирует сигнал, пропорциональнь1й Л Р , тахогенератор 14 фор-г мирует сигнал, пропорциональный ,, а преобразователь 16 подает сигнал ка положительный вход сумматора 2, вращающийся трансформатор 13 фор884мирует сигнал, пропорциональный , а преобраэова-гель 15 подает сигнал, (i (aSlV gln-lCJ X на один из входов блока 17, на другой вход которого подается сигнал Д Р датчика 12, в результате на второй положительный ЁХОД сумматора 2 поступает сигн13л (о в 10И + )ГлР. Таким образом, к сигналу рассогласования в сумматоре 2 прибавляется сигнал (J2 T09fgH + 1С,)ДР4- Kii пропорциональный возмущающему моменту на регулирующем органе 7 и, следовательно, компенсирующий вли5шие этого момента на отработку задающего сигнала, поступающегчэ на привод. Таким образом повыщается быстродействие и точность при отработке задающего сигнала. Использование изобретения в эЛектрогидравлических системах подъемно-транспортных машин, станков и промьшшенных роботов позволит повысить их быстродействие и, тем самым, эффективность их использования.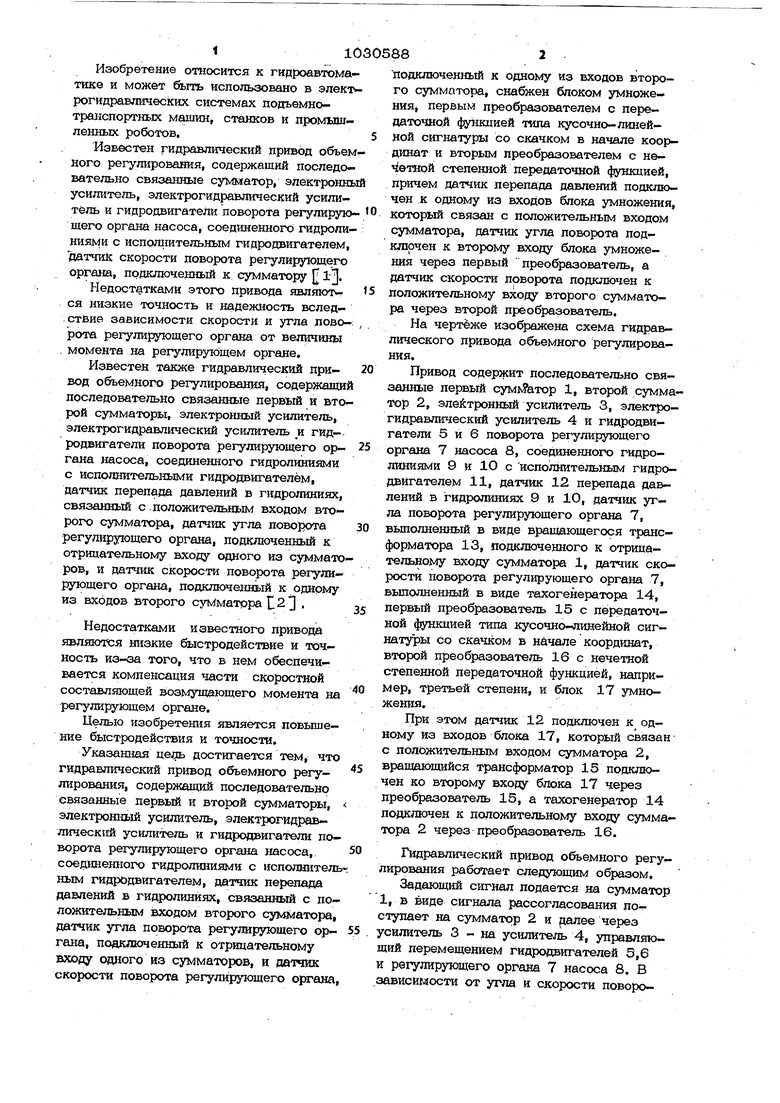
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1980 |
|
SU928093A1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| Электрогидравлический следящий привод | 1979 |
|
SU848773A1 |
| Электрогидравлический следящий привод | 1981 |
|
SU1028903A2 |
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| Электрогидравлический привод с управлением по ускорению | 1975 |
|
SU577325A1 |
| Электрогидравлический следящий привод робота | 1990 |
|
SU1740806A1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1645659A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1250740A1 |
ГВДРАВЛИЧЕСКИЙ ПРР1ВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ, содержащий последовательно связанмые первый и второй сутуматоры, электронный усили-тель, злектрогидравлический усилитель и гидродвигатели поворота регулирук.ш1его органа насоса, соединенного гидролиниями с исполнительны гидродвигателем, датчик перепада давлений в гидролиникх, связанный ; пололсительным входом второго суг-гматора, датчик угла поворота регулирук шего органа, подключенный к отрицательному входу одного из сумматоров, и датчик скорости поворота регулирующего органа, подключенный к одномуиз входов второго сумматора, отличающийся тем, что, с целью повьшхения быстродействия и точности, он снабжен блоком умножения, первым преобразователем с передаточной функцией типа кусочно-линейной сигнатуры со-скачком в начале координат и вторымпреобразователем с нечетной степенной передаточной функцией, причем датчик пе4репада давлений подключен к одному из входов блока умножения, который связан с положительным входом второго сумма® тора, датчик утла поворота подключен к второму входу блока умножения через первый преобразователь а датчик скорости поворота подключен к положительному входу второго сумматора через второй преобразователь.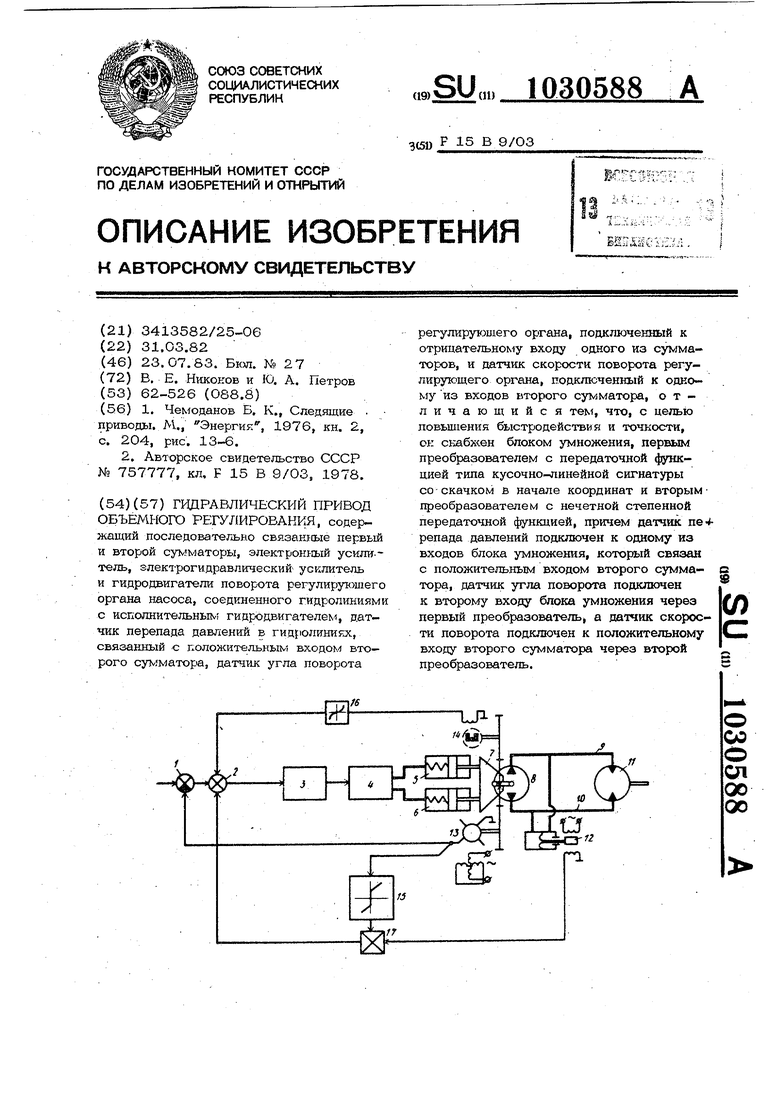
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чемоданов Б | |||
| К., Следящие | |||
| приводы | |||
| М., Энергия, 1976, кн | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ротационный фильтр-пресс для отжатия торфяной массы, подвергшейся коагулированию, и т.п. работ | 1924 |
|
SU204A1 |
| Насос | 1917 |
|
SU13A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 757777, кл, F 15 В 9/03, 1978. | |||
