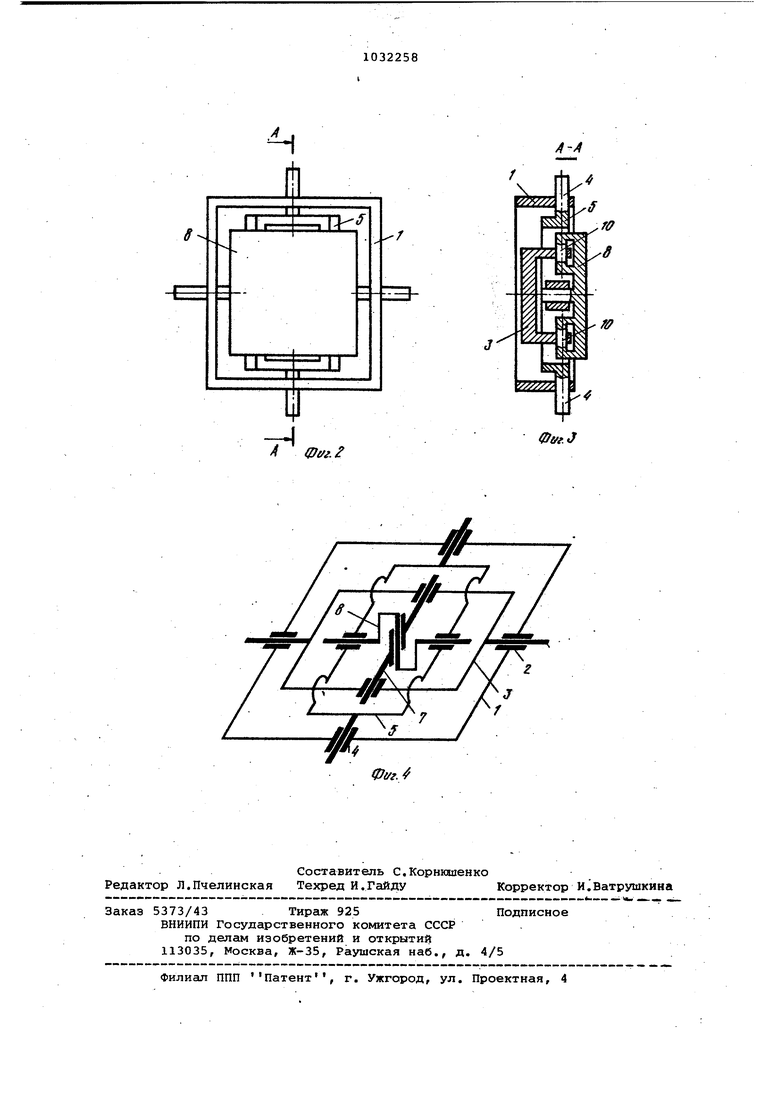
Изобретение относится к мгишиност ению и приборостроению и может быть использовано для перемещения и пово рота по двум координатам с малыми ходами. Известно устройство двухкоординатного перемещения, :одержащее основание, во взаимно перпендикулярны направляющих которого установлены ведущие звенья, взаимодействующие с ведомым звеном посредством штифTaCl. Наиболее близким к предлагаемому является устройство двухкоординатно перемещения, содержащее основание, во взаимно перпендикулярных направл ющих которого установлены ведущие .звенья, взаимодействующие с ведомым 3BeHOML2. В указанном устройстве ведомое звено перемещается по двум координатам. Для того, чтобы ведомому зве ну дать возможность одновременного перемещения и поворота, на него необходимо дополнительно установить устройство двухкоординатного повоРОта. Соединение двух устройств увели.чивает количество направляющих и соответственно стыков, что приводит к понижению точности и жесткости конечного звена)и увеличению габарита устройства. Кроме того, вращательные моменты, возникающие при повороте по двум координатам,действуют не на жестком основании, а на подвижных звеньях двухкоординатного пер емещения, что ухудшает динамические характеристики перемещения, приводящие к понижению точности движения конечного звена уст- ройства. Цель изобретения - расширение эксплуатационных возможностей и повышение точности перемещения. Указанная цель достигается тем, что в устройство двухкоординатного деремещения, содержащее основание с направляк)щими, установленными на не в одной плоскости, ведомое и два ве дущих звена, снабжено промежуточньам звеном с направляющими, установленными перпендикулярно к направляющим одного ведущего звена, а направляющие .ведомого звена установлены в то же плоскости перпендикулярно к нап- равляющим другого ведущего звена, промежуточное звено соединено с ве домым с помощью направляющих, установленных перпендикулярно плоскости расположения ведущих звеньев, при этом направляющие всех звеньев выполнены цилиндрическими. На фиг. 1 показано устройство двухкоординатного линейного перемещения, сечение; на фиг. 2 - то же,, вид устройства сверху; на фиг. 3 сечение А-А на фиг. 2; на фиг, 4 схема устройства. Устройство двухкоординатного перемещения содержит основание 1,на котором в круглых направляющих 2 ус тановлено ведущее звено 3.. Перпендикулярно :оси направляющих 2 в основании 1 в круглых направляющих 4 установлено второе ведущее звено 5,. На ведущем звене 5 с помощью кругЛ1ЛХ направляющих 6, расположенных соосно. с направляющими 2, установлено промежуточное звено 7. Ведомое звено 8 соединено с помощью круглой направлякяней 9, уста- . новленной перпендикулярно к осям направляющих 2,4 и б,с промежуточным звеном 7, ас помощью круглых направляющих. 10, установленных соосно с направляющими 4 - с ведущим звеном 3. Устройство работает следующим образом. При вращении при перемещении веду щего звена 5 с помощью промежуточного звена 7 вращается или перемещается ведомое звено Ь по одной коордийате, при вращении или перемещении ведущего звена 3 - по другой координате. В предлагаемом устройстве использование одной направляющей для поворота и перемещения в каждой координате позволяет уменьшить количество стыков и элементов между звеном и основанием, а также снимаются вращательные моменты с подвижных элементов, что приводит к повышению точности, упрощению конструкции и уменьению габаритов. Устройство позволяет снаружи упавлять ведомым звеном при его нахожении в закрытой камере без применения дополнительных передач.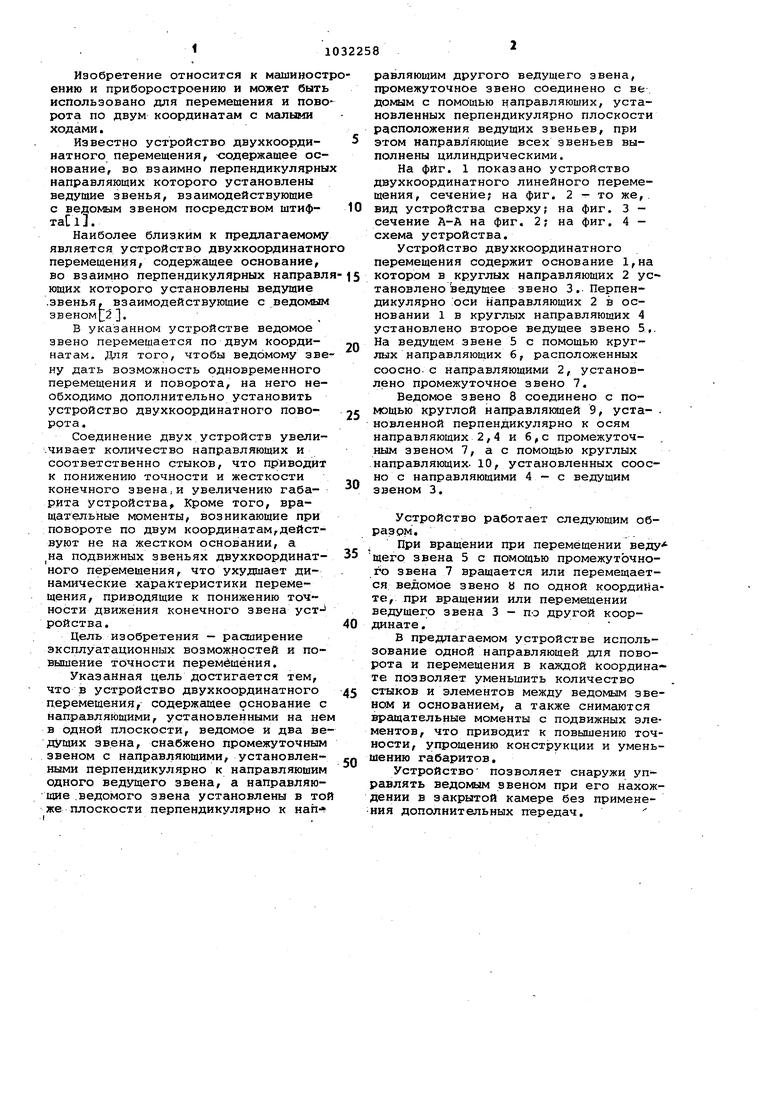
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИР МАНИПУЛЯТОРА | 2005 |
|
RU2283217C1 |
| Микроманипулятор для сферических объектов | 1986 |
|
SU1366385A1 |
| ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ) | 2005 |
|
RU2284896C1 |
| ГИБКИЙ ПРОИЗВОДСТВЕННЫЙ МОДУЛЬ | 1989 |
|
RU2014201C1 |
| Устройство для перемещения по дуге при стереофотосъемке | 1988 |
|
SU1597851A1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2384398C2 |
| РЫЧАЖНЫЙ ПЯТИЗВЕННЫЙ МЕХАНИЗМ | 2020 |
|
RU2751011C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
УСТРОЙСТВО ДВУХКООРДИНАТНОГО ПЕРЕМЕЩЕНИЯ, Содержащее основание с направляющими, установленными на нем в одной плоскости, ведомое и два ведущих звена, о т л и ч аю щ е е с я тем, что, с целью расширения эксплуатационных возможностей, и повышения точности перемещения, оно снабжено промежуточньш звеном с направляющими, установленными перпендикулярно к направляющим одного ведущего звена, а направляющие ведомого звена установлены в той плоскости перпендикулярно к направляющим другого ведущего звена, промежуточное звено соединеноос ведо. кым с помощью нащгзвляющих, установленных перпендикулярно к плоскости расположения .ведущи с звеньев,при i этом направляющие всех звеньев лы-, )полнены цилиндрическими. е (Л с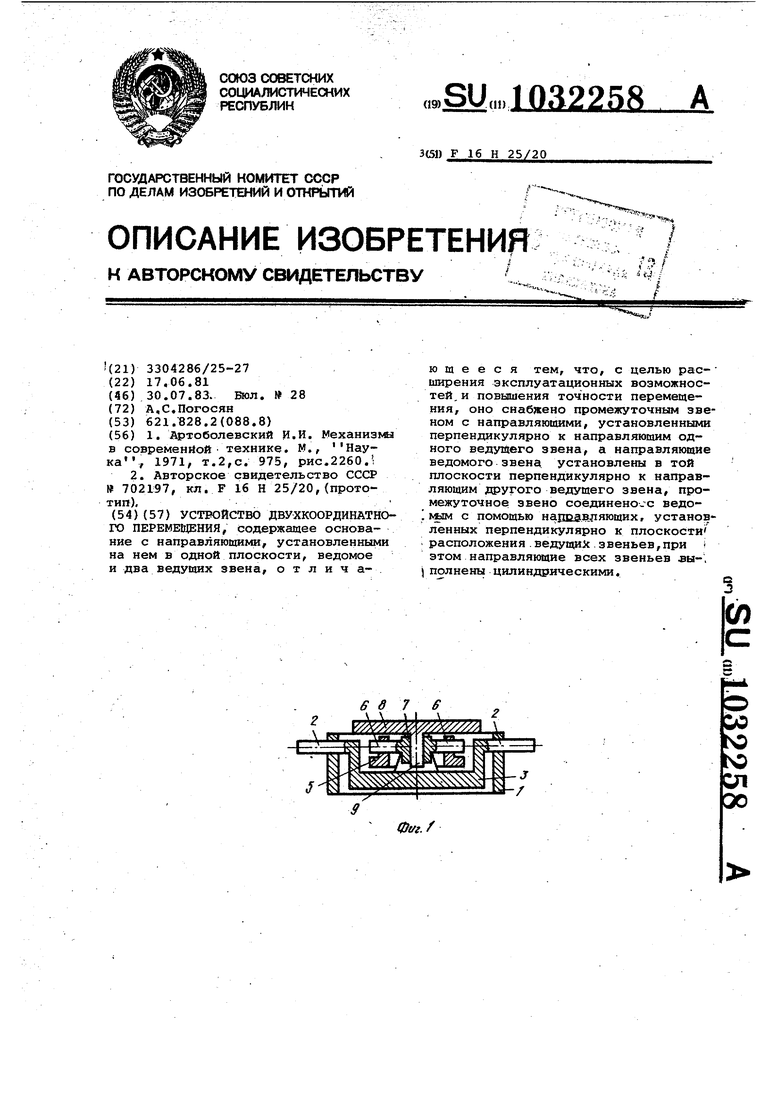
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Артоболевский И.И | |||
| Механизмы в современйой-технике | |||
| М., Наука, 1971, т.2,с | |||
| Осаждающая ванна для выделки искусственных нитей из вискозы | 1925 |
|
SU975A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство двухкоординатного перемещения | 1977 |
|
SU702197A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
