Изобретение относится к механизмам, применяемым в технике для получения заданного движения выходного звена.
Известен дельта-робот [Clavel R. Device for the movement and positioning of an element in space, US Patent No. 4976582, Dec. 11, 1990], имеющий пространственную параллельную структуру и состоящий из трех рычагов, прикрепленных с помощью шарниров к стойке. В параллельных цепях механизма используются параллелограммы, позволяющие сохранять пространственную ориентацию выходного звена. Недостатком такого устройства является невозможность воспринимать выходным звеном большие нагрузки ввиду исполнения параллельных цепей в виде параллелограммов, а также ограниченное число степеней свободы выходного звена, равное четырем (линейные смещения вдоль каждой из трех осей координат и поворот вокруг оси, перпендикулярной основанию).
Наиболее близким к предлагаемому устройству является ротопод [Coulombe J., Bonev I.A. A New Rotary Hexapod for Micropositioning. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany. 2013, pp. 877-880, стр. 877, Fig. 2], относящийся к механизмам параллельной структуры и включающий стойку, выполненную в виде замкнутой круговой направляющей, выходное звено, шесть кинематических цепей, включающих каждая каретку, установленную на круговой направляющей, и промежуточное звено, выполненное в виде стержня и соединенное посредством сферических кинематических пар с одного конца с кареткой, а с другого конца с выходным звеном. Движение выходного звена контролируется шестью приводами, которые приводят в движение каретки, выполняющие в механизме роль ведущих звеньев.
Данный механизм принимается за прототип предлагаемого устройства. Недостаток прототипа заключается в невозможности полного контроля движений платформы при использовании менее шести приводов, в частности, одного привода.
Техническая проблема заключается в создании такого механизма параллельной структуры, в котором движение выходного звена могло бы контролироваться единственным ведущим звеном.
Сущность заявляемого устройства заключается в том, что предлагается устройство для пространственной ориентации объектов, включающее стойку в виде замкнутой круговой направляющей, выходное звено, шесть кинематических цепей, содержащих каждая каретку, установленную с возможностью перемещения по круговой направляющей, и промежуточное звено, причем кинематические пары, соединяющие промежуточные звенья с каретками и выходным звеном выполнены сферическими, при этом устройство снабжено центральным диском, выполненным в виде цилиндрического зубчатого колеса и связанным со стойкой посредством центральной вращательной кинематической пары, при этом каждая кинематическая цепь снабжена ведущим зубчатым колесом, выполненным за одно целое с ведущим диском, который соединен посредством гибкой связи с ведомым диском, на котором жестко установлен кривошип, образующий вращательную кинематическую пару с соответствующим камнем, входящим в поступательную кинематическую пару с начальным звеном, сопряженным с центральным диском вращательной кинематической парой, и жестко соединенным с соответствующей кареткой, при этом ведущее зубчатое колесо и ведомый диск образуют со стойкой вращательные кинематические пары с вертикальными осями. Кроме этого, в каждой кинематической цепи кривошип выполнен с отверстиями в части, выступающей за диаметр ведомого диска.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в том, что движение выходного звена контролируется единственным ведущим звеном, благодаря установке внутри круговой направляющей нового одноподвижного механизма с центральной вращательной кинематической парой, подвижные звенья которого жестко соединены с каретками, движущимися по круговой направляющей и на которые устанавливаются шесть промежуточных звеньев, ориентирующих выходное звено в пространстве.
Предлагаемое изобретение поясняется чертежом, где
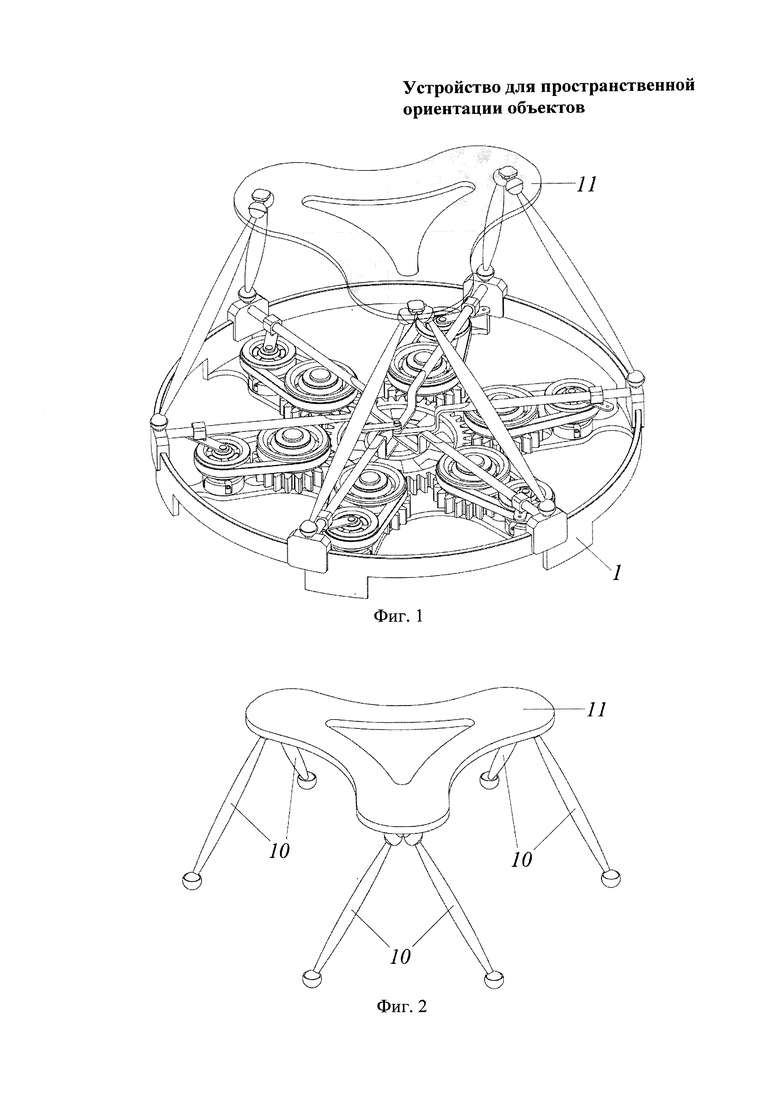
на фиг. 1 изображено устройство для пространственной ориентации объектов,
на фиг. 2 изображена пространственная кинематическая цепь параллельной структуры,
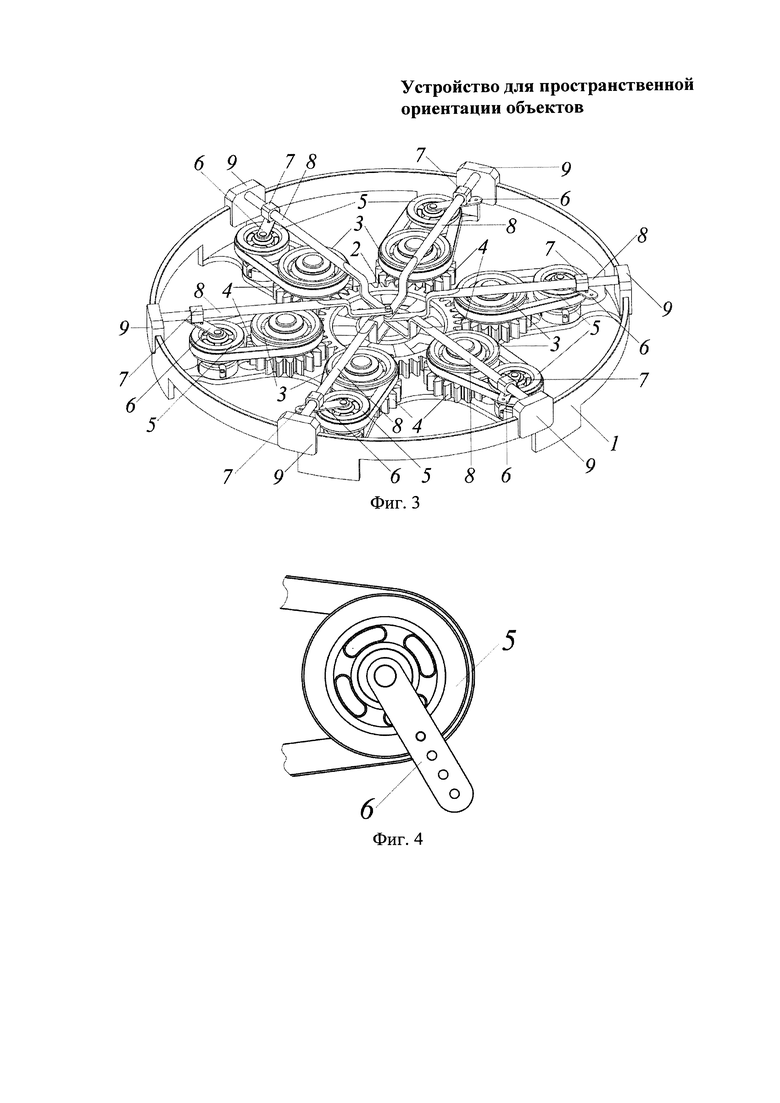
на фиг. 3 изображен одноподвижный плоский механизм,
на фиг. 4 изображен ведомый диск с кривошипом.
Устройство состоит из стойки 1, выполненной в виде замкнутой круговой направляющей, центрального диска 2, выполненного в виде цилиндрического зубчатого колеса, ведущих дисков 3, жестко соединенных с зубчатыми цилиндрическими колесами 4, ведомых дисков 5, кривошипов 6, камней 7, начальных звеньев 8, жестко соединенных с каретками 9, промежуточных звеньев 10 и выходного звена 11.
Центральный диск 2 образует со стойкой 1 центральную вращательную кинематическую пару, а также зубчатое зацепление с цилиндрическими колесами 4. Ведущие диски 3, жестко установленные на колесах 4, соединены с ведомыми дисками 5 посредством гибкой связи, а со стойкой 1 посредством вращательных кинематических пар. Камни 7 образуют с кривошипами 6, жестко установленными на ведомых дисках 5, вращательные кинематические пары, а с начальными звеньями 8 - поступательные кинематические пары. При этом начальные звенья 8 образуют с центральным диском 2 вращательные кинематические пары. Каретки 9 входят со стойкой 1 во вращательные кинематические пары, а с промежуточным звеном 10 - в сферическую кинематическую пару. Оси вращательных пар 1-2, 1-3 (1-4), 1-5(1-6), 6-7, 2-8 и 1-9 направлены перпендикулярно плоскости движения кареток 9. Выходное звено 11 и промежуточные звенья 10 соединяются сферическими кинематическими парами.
Устройство, изображенное на фиг. 1, образуется путем соединения пространственной кинематической цепи параллельной структуры, изображенной на. фиг. 2, и плоского одноподвижного механизма, изображенного на фиг. 3, посредством установки промежуточных звеньев 10 на каретки 9 через сферические кинематические пары. Полученный таким образом пространственный механизм параллельной структуры приводится в движение поворотом центрального диска 2, который полностью контролирует движение выходного звена 11.
С учетом того, что на кривошипах 6 выполнены отверстия с возможностью установки вращательных кинематических пар 6-7 на разном расстоянии от центра вращения ведомых дисков 5 (фиг. 4), появляется возможность получать разные перемещения кареток 9 для каждой кинематической цепи механизма, тем самым изменяя траекторию движения выходного звена 11.
Принцип работы механизма заключается в следующем. При вращении центрального диска 2, движение передается через зубчатые передачи 2-4 на колеса 4, которые приведут в движение ведущие диски 3 за счет того, что они выполнены с колесами 4 за одно целое. Далее через гибкие связи движение передается ведомым дискам 5, а соответственно и жестко соединенным с ними кривошипам 6, которые вращаясь, приведут в движение камни 7, которые перемещаясь вдоль начального звена 8, будут отклонять его, тем самым перемещая каретки 9 относительно стойки 1. При этом движение от кареток 9 передается на промежуточные звенья 10, которые приводят в движение выходное звено 11, ориентируя его на заданные углы и расстояния относительно стойки 1.
Применение предлагаемого устройства целесообразно для задания пространственной ориентации и перемещения объектов, а также для выполнения цикличных операций, требующих движение по заданной траектории. Предлагаемый механизм может быть использован в качестве основания механизмов-тренажеров транспортных средств, а также для создания медицинского оборудования, например, применяться в конструкциях манипуляционных горизонтальных поверхностей для наклонов и перемещений пациентов или конечностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| Устройство для перемешивания | 2023 |
|
RU2799476C1 |
| ОРИЕНТИРУЮЩАЯ ПЛАТФОРМА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2714147C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2008 |
|
RU2369430C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| СКЛАДНОЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2720270C1 |
Изобретение относится к механизмам, применяемым для получения заданного движения выходного звена. Устройство содержит стойку в виде замкнутой круговой направляющей, выходное звено, шесть кинематических цепей, содержащих каждая каретку, установленную с возможностью перемещения по круговой направляющей, и промежуточное звено. Кинематические пары, соединяющие промежуточные звенья с каретками и выходным звеном, выполнены сферическими. Устройство снабжено центральным диском, выполненным в виде цилиндрического зубчатого колеса и связанным со стойкой посредством центральной вращательной кинематической пары. Кинематическая цепь снабжена ведущим зубчатым колесом, выполненным за одно целое с ведущим диском, который соединен посредством гибкой связи с ведомым диском, на котором жестко установлен кривошип, образующий вращательную кинематическую пару с соответствующим камнем, входящим в поступательную кинематическую пару с начальным звеном, сопряженным с центральным диском вращательной кинематической парой, и жестко соединенным с соответствующей кареткой. Ведущее зубчатое колесо и ведомый диск образуют со стойкой вращательные кинематические пары с вертикальными осями. Изобретение обеспечивает возможность контролировать движение выходного звена единственным ведущим звеном. 1 з.п. ф-лы, 4 ил.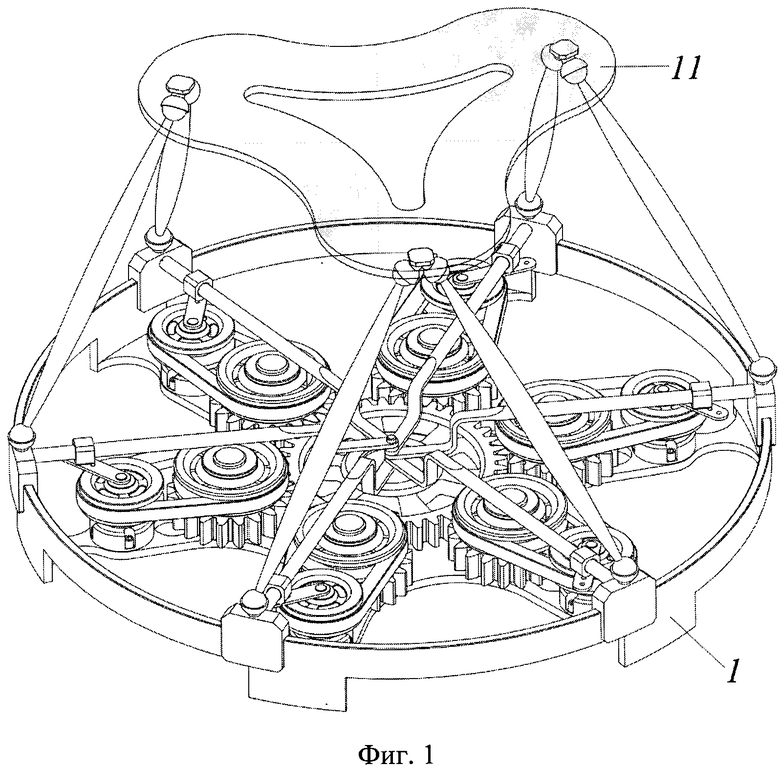
1. Устройство для пространственной ориентации объекта, содержащее стойку в виде замкнутой круговой направляющей, выходное звено, шесть кинематических цепей, содержащих каждая каретку, установленную с возможностью перемещения по круговой направляющей, и промежуточное звено, причем кинематические пары, соединяющие промежуточные звенья с каретками и выходным звеном, выполнены сферическими, отличающееся тем, что устройство снабжено центральным диском, выполненным в виде цилиндрического зубчатого колеса и связанным со стойкой посредством центральной вращательной кинематической пары, при этом каждая кинематическая цепь снабжена ведущим зубчатым колесом, выполненным за одно целое с ведущим диском, который соединен посредством гибкой связи с ведомым диском, на котором жестко установлен кривошип, образующий вращательную кинематическую пару с соответствующим камнем, входящим в поступательную кинематическую пару с начальным звеном, сопряженным с центральным диском вращательной кинематической парой, и жестко соединенным с соответствующей кареткой, при этом ведущее зубчатое колесо и ведомый диск образуют со стойкой вращательные кинематические пары с вертикальными осями.
2. Устройство по п. 1, отличающееся тем, что в каждой кинематической цепи кривошип выполнен с отверстиями в части, выступающей за диаметр ведомого диска.
| Coulombe J., Bonev I.A | |||
| A New Rotary Hexapod for Micropositioning | |||
| Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Ветряный двигатель с принудительно поворачиваемыми посредством цепных передач лопастями | 1924 |
|
SU877A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 4976582 A1, 11.12.1990 | |||
| ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ НЕМЕТАЛЛИЧЕСКИХПОКРЫТИЙ | 0 |
|
SU160612A1 |
| Способ получения прорезиненного материала | 1960 |
|
SU133044A1 |

