Изобретение относится к области машиностроения, в частности к механизмам, имеющим более одной кинематической цепи, передающей движение от основания к выходному звену (механизмы параллельной структуры).
Известен пространственный механизм, содержащий четыре кинематических цепи, передающие движение от основания к выходному звену (патент US 6997669 по кл. В66С 1/00 от 12 ноября 2002 г.). Этот механизм имеет четыре степени свободы: три независимых поступательных перемещения выходного звена по декартовым координатам и один поворот. Недостатком данного устройства является большое количество кинематических цепей, создающих ограничения на рабочую зону механизма по условию отсутствия их взаимного соприкосновения при движении механизма. Поворот выходного звена также ограничен этим условием. Кроме того, большое количество звеньев и кинематических пар образует достаточно сложную конструкцию, точное изготовление и калибровка которой проблематичны.
Известен пространственный механизм, содержащий три кинематические цепи, каждая из которых содержит две вращательных кинематических пары и одну цилиндрическую, сопрягающую подвижные звенья оси кинематических пар, принадлежащих одной и той же кинематической цепи параллельны (патент CN 1304820 по кл. B23Q 1/48 от 28 февраля 2001 г.). Недостатком данного механизма является отсутствие возможности поворота выходного звена.
Наиболее близким техническим решением по отношению к предложенному устройству по совокупности существенных признаков является пространственный механизм, упомянутый в патенте US 6729202 от 31 мая 2001 г. по кл. B25J 11/00. Этот механизм содержит кинематические цепи, каждая из которых содержит две вращательные кинематические пары и цилиндрическую кинематическую пару, сопрягающую ведущее звено с основанием, оси кинематических пар, принадлежащих одной и той же кинематической цепи, параллельны. Недостатком данного механизма является отсутствие возможности поворота выходного звена.
Задача, на решение которой направлено заявленное изобретение, заключается в увеличении диапазона поворота выходного звена, диапазона его поступательных перемещений и обеспечении возможности точного изготовления и калибровки механизма.
Поставленная задача решается за счет того, что пространственный механизм включает в себя две кинематические цепи. Первая кинематическая цепь состоит из ведущего звена, сопряженного с основанием цилиндрической кинематической парой, ведомого звена, сопряженного с ведущим звеном вращательной кинематической парой, выходного звена механизма, сопряженного с ведомым звеном вращательной кинематической парой. Оси всех кинематических пар первой кинематической цепи параллельны оси ее цилиндрической кинематической пары. Вращательная кинематическая пара, сопрягающая ведущее звено и ведомое звено, имеет ограничители угла вращения, установленные на ведущем или на ведомом звене первой кинематической цепи, позволяющие этой кинематической цепи проходить область неуправляемого движения. Упомянутые ограничители могут быть с упругими элементами во избежание удара при их использовании. Способ прохода этой области аналогичен способу, описанному в патенте RU 2288091 по кл. B25J 9/10 от 14 декабря 2004 г. Проход области неуправляемого движения позволяет увеличить диапазон поворота выходного звена.
Вторая кинематическая цепь также состоит из ведущего звена, сопряженного с основанием цилиндрической кинематической парой, ведомого звена, сопряженного с ведущим звеном вращательной кинематической парой, ось которой параллельна оси цилиндрической кинематической пары. Кроме того, вторая кинематическая цепь содержит промежуточное звено, сопряженное с ведомым звеном вращательной кинематической парой, ось которой параллельна оси цилиндрической кинематической пары второй кинематической цепи. Промежуточное звено сопрягается с выходным звеном механизма вращательной кинематической парой, ось которой параллельна оси цилиндрической кинематической пары первой кинематической цепи.
Предпочтительно, чтобы оси цилиндрических кинематических пар двух кинематических цепей были взаимно перпендикулярны.
Ведущие звенья механизма сопрягаются с основанием цилиндрическими кинематическими парами, которые допускают перемещение вдоль оси кинематической пары и вокруг нее. До недавнего времени эти перемещения приходилось реализовывать, применяя раздельные приводы, например в механизме, описанном в патенте ЕР 0263627 по кл. B25J 17/02 от 30 сентября 1986 г. или в мехатронном модуле, описанном в патентной заявке RU 2006104075 по кл. В24В 19/14 от 13 февраля 2006 г. Применение совместного вращательно-поступательного синхронного привода с ротором в виде постоянного магнита позволяет уменьшить число кинематических пар и упростить конструкцию механизма. Примеры совместных вращательно-поступательных синхронных приводов приводятся в патенте US5952744 по кл. Н02К41/00 от 23 июня 1998 г. и в патенте US6798087 по кл. Н02К41/00 от 8 января 2002 г. Такой привод вместе с датчиками положения составляет вращательно-поступательный мехатронный модуль, предназначенный для приведения в движения ведущего звена каждой кинематической цепи пространственного механизма.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения.
Следовательно, заявленное изобретение, соответствует требованию "новизна" по действующему законодательству.
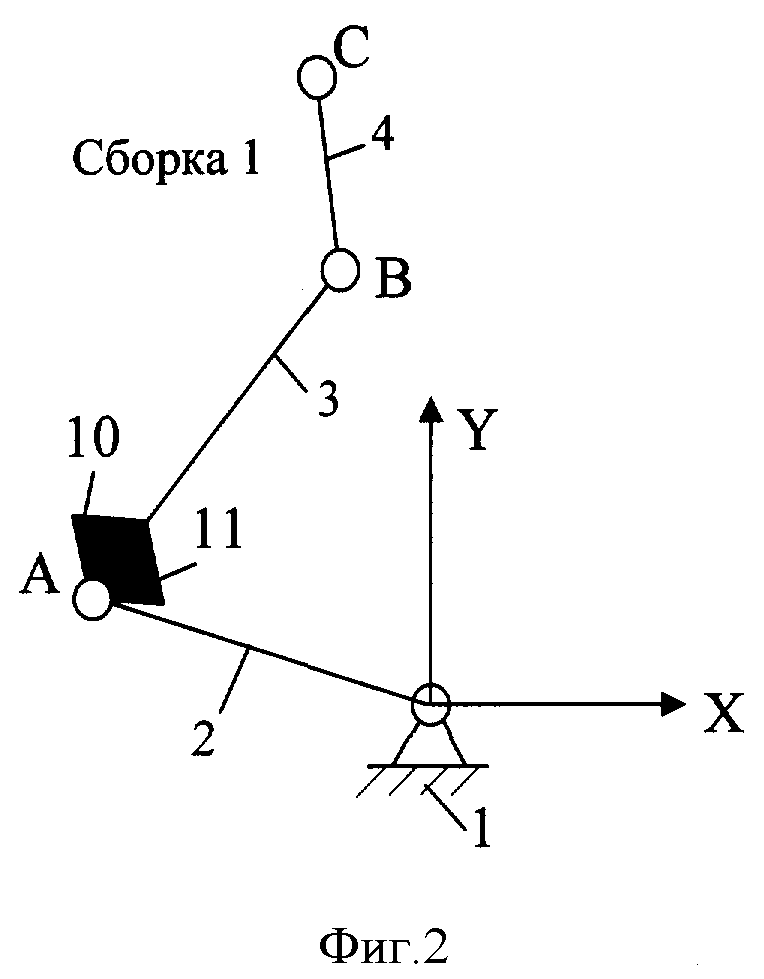
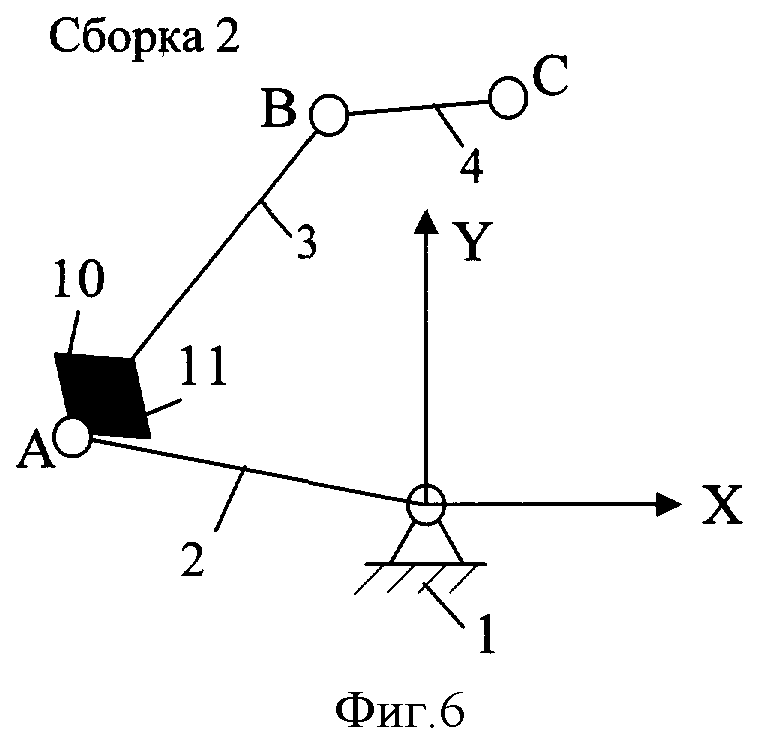
На фиг.1 представлен вид в перспективе пространственного механизма. На фиг.2-6 представлена последовательность прохода области неуправляемого движения первой кинематической цепи с применением ограничителя угла вращения.
Пространственный механизм в соответствии с предпочтительным вариантом осуществления изобретения (фиг.1) содержит основание 1, сопряженное с ведущим звеном 2 цилиндрической кинематической парой. На основании размещены мехатронный модуль 8 вращательно-поступательных перемещений и мехатронный модуль 9 вращательно-поступательных перемещений. Мехатронный модуль 8 перемещает ведущее звено 2 по линейной координате q1 вдоль оси Z и угловой координате q2 вокруг оси Z модуля. Система координат XYZ на фиг.1 выбрана так, чтобы ось Z совпадала с осью цилиндрической кинематической пары первой кинематической цепи, а ось X была параллельна оси цилиндрической кинематической пары второй кинематической цепи механизма. Ведомое звено 3 сопрягается с ведущим звеном 2 вращательной кинематической парой, имеющей ограничитель 10 угла вращения, второй ограничитель 11 угла вращения не виден и показан схематически на других чертежах. Выходное звено 4 сопрягается вращательной кинематической парой со звеном 3 и вращательной кинематической парой с промежуточным звеном 7. Оси кинематических пар, сопрягающих звенья 1 и 2, 2 и 3, 3 и 4, 4 и 7, параллельны. Звено 7 сопрягается вращательной кинематической парой с ведомым звеном 6. Звено 6 сопрягается вращательной кинематической парой с ведущим звеном 5. Звено 5 сопрягается с основанием 1 цилиндрической кинематической парой и перемещается мехатронным модулем 9 вращательно-поступательных перемещений по линейной координате вдоль оси кинематической пары и угловой координате q4 вокруг оси кинематической пары. Оси кинематических пар, сопрягающих звенья 1 и 5, 5 и 6, 6 и 7, параллельны. Выходное звено 4 может, например, содержать привод вращения режущего инструмента при использовании пространственного механизма в технологических машинах.
Устройство в соответствии с предпочтительным вариантом осуществления изобретения работает следующим образом. Мехатронный модуль 8 перемещает выходное звено по оси Z, перемещая первую кинематическую цепь по координате q1. Мехатронный модуль 9 перемещает выходное звено по оси X, перемещая вторую кинематическую цепь по координате q3. Мехатронный модуль 9 изменением координаты q4 перемещает звено 7 по оси Y и вместе с ним перемещает выходное звено по этой оси, при этом выходное звено поворачивается вокруг оси кинематической пары, сопрягающей звенья 4 и 7 (угол α). Чтобы звено 4 перемещалось поступательно по оси Y, нужно поддерживать постоянным угол α, который зависит от координаты q2, которая изменяется по заданному закону мехатронным модулем 8. Пространственный механизм имеет четыре независимые управляемые координаты q1, q2, q3, q4, которые позволяют перемещать выходное звено по четырем независимым координатам X, Y, Z, α. Это дает возможность применять механизм для поступательного перемещения электрошпинделя режущего инструмента. Возможность поворота на угол α позволяет инструменту получить доступ к участкам обрабатываемой детали, имеющей сложную поверхность.
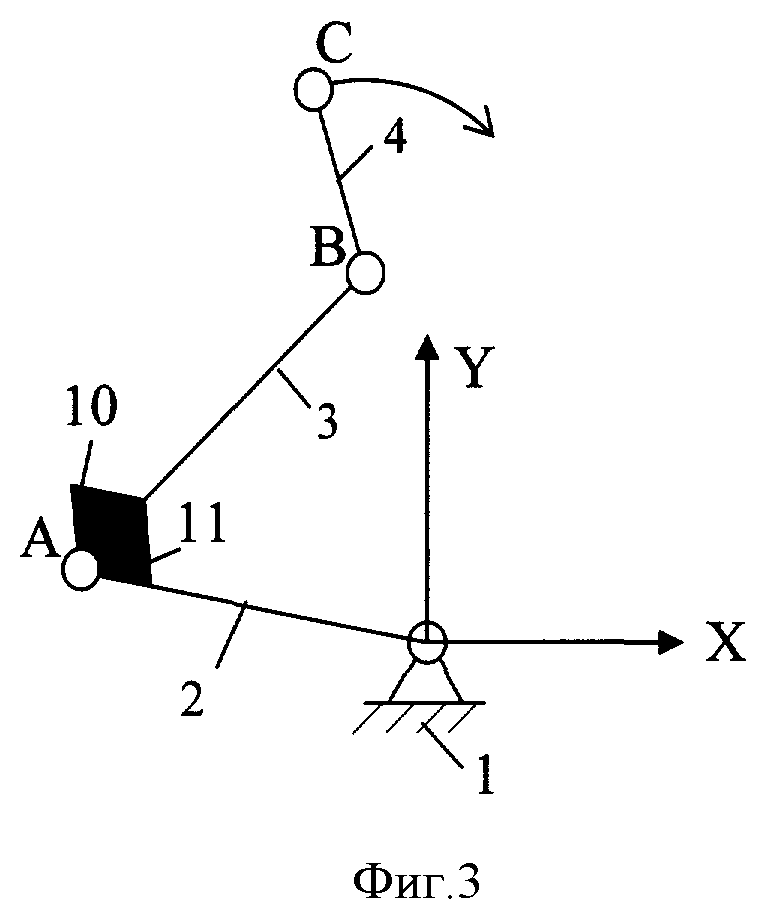
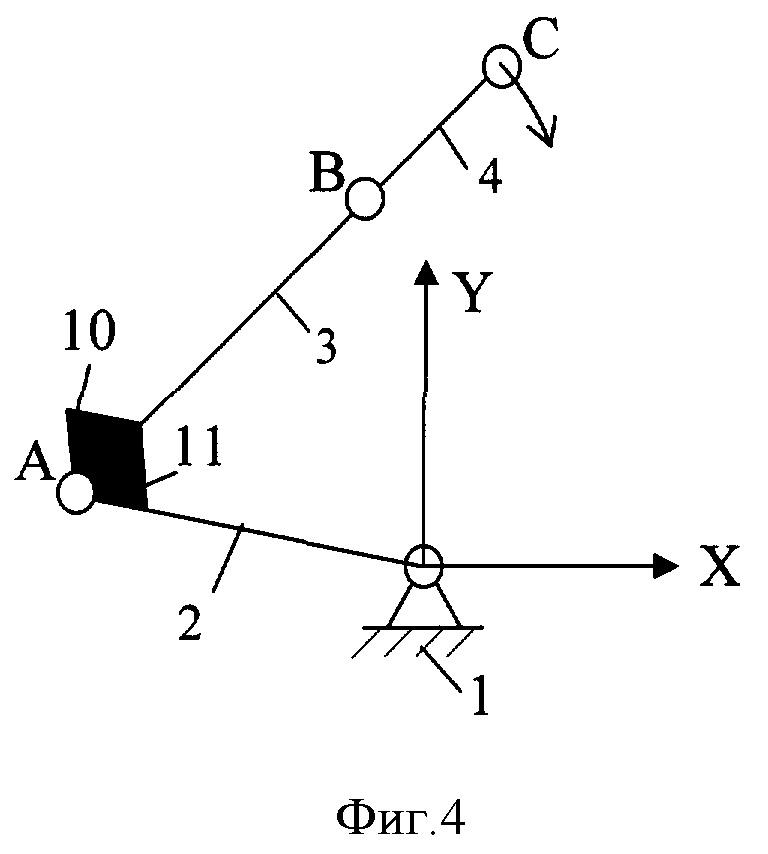
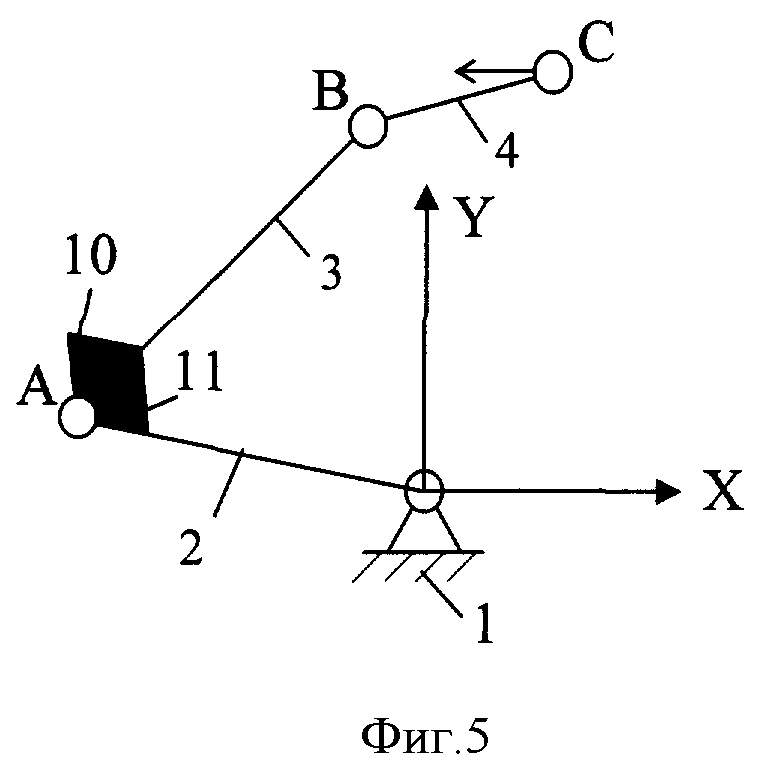
Для увеличения диапазона поворота выходного звена на угол α предлагаемое устройство обеспечивает возможность прохода области неуправляемого движения первой кинематической цепи. Первая кинематическая цепь механизма осуществляет плоское движение при постоянной координате q1 и изображена на фиг.2-6 как кинематическая схема плоского механизма. Оси трех кинематических пар, сопрягающих звенья 2 и 3, 3 и 4, 4 и 7, обозначены соответственно как А, В, С. Если А, В, С расположены на одной прямой, то группа звеньев 3 и 4 находится в состоянии неуправляемого движения. Если А, В, С расположены в треугольнике ABC против часовой стрелки, то группа звеньев 3 и 4 находится в сборке 1 (фиг.2). Если А, В, С расположены в треугольнике ABC по часовой стрелке, то группа звеньев 3 и 4 находится в сборке 2 (фиг.6). Чтобы перейти из сборки 1 в сборку 2, необходимо исключить состояние неуправляемого движения при переходе (фиг.4). Для этого в конструкцию механизма вводится ограничитель 11 угла (фиг.2), а для обратного перехода - ограничитель 10 угла. Переход из сборки 1 в сборку 2 производится следующим образом: ось С перемещается мехатронным модулем 9 в направлении уменьшения координаты Y. В положении, показанном на фиг.3, ограничитель 11 угла прижимается к звену 2 через звено 3. Затем мехатронный модуль 9 осуществляет перемещение оси С по дуге вокруг оси В по часовой стрелке, проходя положение, показанное на фиг.4, где ограничитель 11 угла исключает неуправляемое перемещение группы звеньев 3 и 4 в сборку 1. Продолжая дуговое перемещение оси С, производится переход группы звеньев 3 и 4 в сборку 2 (фиг.5) с уменьшением числа степеней свободы механизма на 1. Чтобы начать перемещение в сборке 2, ограничитель 11 угла отводится от звена 2 (фиг.6) перемещением оси С в направлении уменьшения координаты X. Обратный переход из сборки 2 в сборку 1 может быть произведен тем же способом, но с применением другого ограничителя 10 того же угла.
Изобретение не должно рассматриваться как ограниченное только вариантом осуществления, описанным выше, но могут производиться различные видоизменения и сочетания. Например, могут применяться различные виды конструкций мехатронных модулей вращательно-поступательных перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| ШАРНИР МАНИПУЛЯТОРА | 2005 |
|
RU2283217C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПРОСТРАНСТВЕННЫЙ ПАРАЛЛЕЛОГРАММНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2022 |
|
RU2784764C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| СКЛАДНОЙ МЕХАНИЗМ С ИНТЕГРИРОВАННЫМИ КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ | 2019 |
|
RU2729835C1 |
| ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ) | 2005 |
|
RU2284896C1 |
| СТЕРЖНЕВАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2760496C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534706C1 |
Изобретение относится к области машиностроения, в частности к пространственному механизму, имеющему две кинематические цепи, передающие движение от основания к выходному звену. Каждая кинематическая цепь имеет ведущее звено, сопряженное с основанием цилиндрической кинематической парой, ведомое звено, сопряженное с ведущим звеном вращательной кинематической парой. Первая кинематическая цепь содержит выходное звено, сопряженное вращательными кинематическими парами с ведомым звеном первой кинематической цепи и со второй кинематической цепью. Вторая кинематическая цепь содержит промежуточное звено, сопряженное с ведомым звеном вращательной кинематической парой, ось которой параллельна оси цилиндрической кинематической пары второй кинематической цепи, и сопряженное с выходным звеном вращательной кинематической парой, ось которой параллельна оси цилиндрической кинематической пары первой кинематической цепи. Каждая кинематическая цепь приводится в движение двухкоординатным вращательно-поступательным мехатронным модулем. Изобретение позволит увеличить диапазон поворота выходного звена за счет создания возможности прохода области неуправляемого движения механизма путем применения ограничителей поворота в одной из вращательных кинематических пар механизма и увеличить диапазон поступательных перемещений выходного звена. 3 з.п. ф-лы, 6 ил.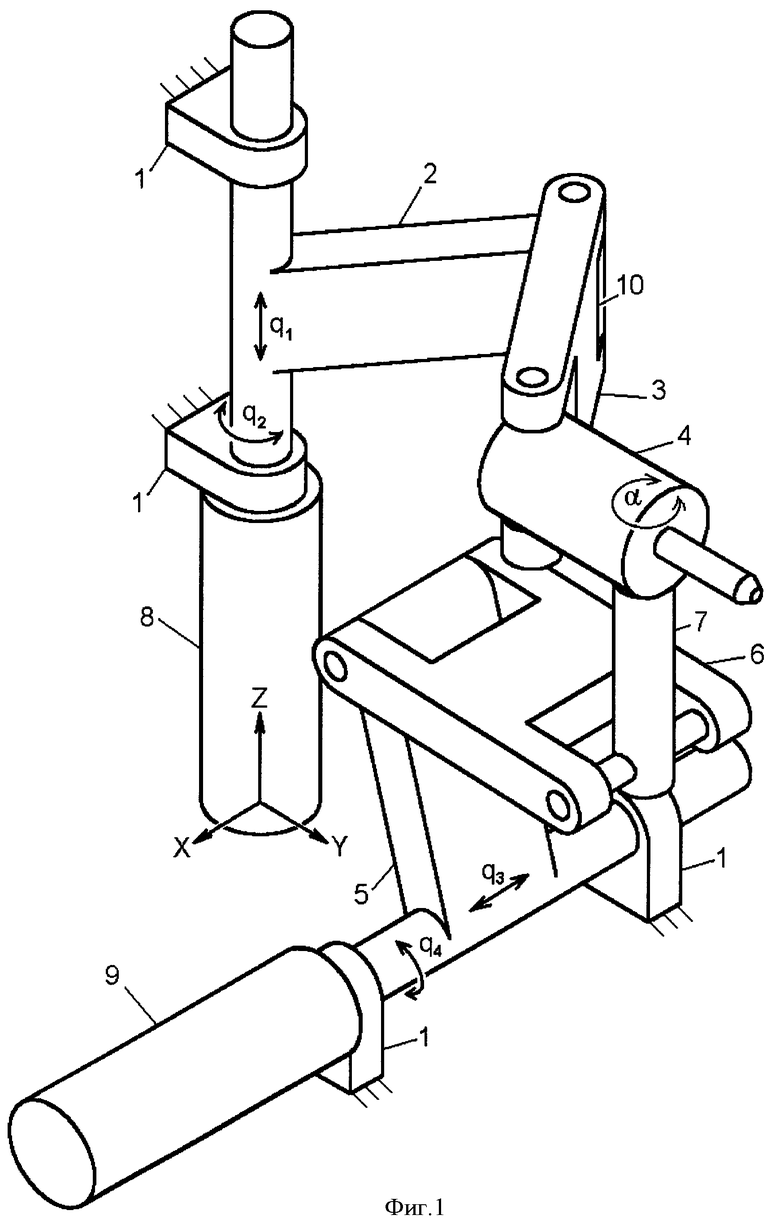
1. Пространственный механизм, содержащий основание, первую и вторую кинематические цепи, каждая из которых имеет ведущее звено, сопряженное с основанием цилиндрической кинематической парой, ведомое звено, сопряженное с ведущим звеном вращательной кинематической парой, первая кинематическая цепь содержит выходное звено, сопряженное вращательными кинематическими парами с ведомым звеном первой кинематической цепи и со второй кинематической цепью, отличающийся тем, что для обеспечения возможности поворота выходного звена вторая кинематическая цепь содержит промежуточное звено, сопряженное с ведомым звеном вращательной кинематической парой, ось которой параллельна оси цилиндрической кинематической пары второй кинематической цепи, и сопряженное с выходным звеном вращательной кинематической парой, ось которой параллельна оси цилиндрической кинематической пары первой кинематической цепи.
2. Пространственный механизм по п.1, отличающийся тем, что оси цилиндрических кинематических пар двух кинематических цепей взаимно перпендикулярны.
3. Пространственный механизм по п.1, отличающийся тем, что ведущие звенья приводят в движения вращательно-поступательными мехатронными модулями, каждый из которых выполняет управляемые перемещения по двум независимым координатам в соответствующей цилиндрической кинематической паре.
4. Пространственный механизм по п.1, отличающийся тем, что вращательная кинематическая пара, сопрягающая ведущее звено и ведомое звено первой кинематической цепи, имеет ограничители угла вращения, установленные на ведущем или на ведомом звене этой кинематической цепи, для обеспечения возможности прохода области неуправляемого движения и тем самым увеличения диапазона поворота выходного звена, ограничители снабжены упругими элементами во избежание удара при их использовании.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Пространственный механизм с четырьмя степенями свободы | 1989 |
|
SU1668786A1 |
| ПРОСТРАНСТВЕННЫЙ РЕГУЛИРУЕМЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РОБОТА | 2003 |
|
RU2245241C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКООРДИНАТНЫМ ПЯТИЗВЕННЫМ МАНИПУЛЯТОРОМ | 2004 |
|
RU2288091C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

