Изобретение относится к прокатно му производству, а именно к устройствам автоматического регулированил толщины полосы на широкополосных стангис. Известно устройство для компенса ции (фильтрации) сигнала эксцентриситета вашков, содержащее в каналах усилия прокатки различные частотные фильтры,например, нижних частот Недостатком такого устройства яв ляется то, что для эффективного подавления сигнала эксцентриситета вал ков необходимы такие постоянные вре мени, которые вьззывсцот значительные фазовые сдвиги полезной составляющей усилия прокатки. Это приводит к увеличению динамической погрешности регуляторов толщины, а следовательно, к снижению точности регулирования. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство содержащее измеритель усилия прокатки, первый сумматор, первую следящую систему, включающую второй сумматор и первый интегратор, охваченны отрицательной обратной связью, первый источник опорного напряжения, дифференцирующий блок, ключ, два бло ка-определения модуль-функции, втору следящую систему, содержащую третий сумматор, и второй интегратор, охваченные отрицательной обратной связью четвертый сумматор, компаратор, первый элемент задержки, причем выход измерителя усилия прокатки соединен со входом второго сумматора первой следящей системы, выход которого соединен со входами дифференцирующего блока, в-торого блока определения МОдуль-функций и первого интегратор выход дифференцирующего блока соединен со входом ключа, выход которого соединен со входом первого блока определения модульфункции, выход первого блока определ ния модуль-функции соединен с первым входом третьего сумматора второй следящей системы, выход которого сое динен со входом второго интегратора второй следящей системы, выход второго интегратора второй, следящей системы соединен с первым входом четвертого сумматора, второй вход которого и второй вход третьего сумматора соединены с выходом первого источника опорного напряжения, выход четвертого сумматора соединён с первым входом компаратора, второй вход которого соединен с выходом второго блока определения модуль-функции, выход компаратора соединен с управляющим входом первого интегратора первой следящей системы и входом пер вого элемента задержки, выход которого соединен с управляющим входом ключа. Устройство работает следующим образом. Сигнал усилия прокатки поступает на вход первой следящей системы, выходной сигнал которой является выходом устройства. Интегратор первой следящей системы имеет два режима работы Интегрирование мять , в зависимости от сигнала на его управляющем входе, В исходном состоянии интегратор находится в реПамятьВ процессе работы устройства из выходного сигнала второго сумматора, соответствующего текущему отклонению усилия прокатки от запомненного первым интегратором значения, выделяется составляющая, обусловленная эксцентриситетом валков, путем дифференцирования этого сигнала и определения его модульфункции. Затем эта составляющая поступает на первый вход третьего сумматора, на второй вход которого поступает величина опорного напряжения, равная первоначально установленной зоне нечувствительности. Вторая следящая система, состоящая из третьего сумматора и второго интегратора, осуществляет усреднение и сглаживание сигнала эксцентриситета валков и корректировку первоначально заданной зоны нечувствительности от первого источника опорного напряжения. Компаратор сравнивает модульфункцию сигнала отклонения усилия с зоной нечувствительности и в случае превышения им зоны нечувствительности переключает первый интегратор в режим интегрирования. Зона нечувствительности определяется только в режиме интегрирования первого интегратора с выдержкой времени на переходный процесс, что достигается с помощью ключа и элемента задержки С2 . Недостатками этого устройства являются низкая точность, особенно при переменной скорости прокатки, большая сложность и, как следствие, трудность настройки и невысокая надежность устройства. Низкая точность при переменной скорости прокатки обуславливается тем, что сигнал эксцентриситета валков выделяется из полного сигнала отклонения усилия прокатки путем дифференцирования последнего. Аналогично, сглаживание и усреднение сигнала эксцентриситета осуществляется вторым интегратором. Ясно, что величина сигнала на выходе дифференцирующего блока зависит от частоты этого сигнала. При переменной скорости прокатк, а следовательно, и частоте эксцентриситета валков, сигнал электроситета выделяется с бЬльшой погрешностью и соответственно зона нечувствительности не будет соответствовать амплитуде этого сигнала, что необходимо для нормальной работы устройства. Анёшогичнс, второй интегратор, осуществляющий сглаживание выпрямлен ного сигнала эксцентриситета должен иметь большую постоянную времени, соответствующую частоте эксцентриси тета при минимальной возможной скорости прокатки. А при увеличении скорости прокатки в пять и более ра-з что характерно, например, для непрерывных станов холодной прокатки, интегратор не успевает следить за изменением амплитуды эксцентриситета валков, что также приводит к увеличению погрешности устройства, Сложность устройства определяется наличием тринадцати сложных блоков, многие из Которых/например эталонные источники, элементы задержки и др., подлежат параметрической настройке. Целью изобретения является повышени точности работы устройства при одновре менном упрощении его конструкции. Указанная цель достигается тем, что устройство для компенсации эксцентриситета валков при автоматическом регулировании толщины полосы, содержащее следящую систему, включающую последовательно соединенные сумматор и интегратор, охваченные от рицательной обратной связью, компа ратор,. первый вход которого соединен с выходом сумматора, а выход с управляющим входом интегратора, и блок-модуля, дополнительно снабжено перестраиваемыми по частоте фильтрами высокой и низкой частот, причем вход фильтра высокой частоты также соединен с выходом сумматора, а выход - с входом блока модуля, выход блока модуля соединен с входом филь ра низкой частоты,выход которого соеди нен с вторым входом компаратора,а управ ляющие входы фиЛьтров низкой и высокой частот соединены с датчикомскорости прокатки, введенным в устройство. Поставленная цель достигается также тем, что перестраиваешле по частоте фильтры высокой и низкой частот состоят, каждый из последовательно соединенных соответственно второго и третьего сумматора и второго и треть его интеграторов, охваченных отрицаveJi bHUMH обратными связями, и широтно-импульсного модулятора, причем входы широтно-импульсных модуляторов являются управляющими входами фильт ров, а выходы соединены с управляющими входами второго и третьего интеграторов, входами фильтров являются входы второго и третьего сумматоров , выходом фильтра высокой частоты является выход второго сумматора, а выходом фильтра низкой частоты является выход третьего интегратора. Введение в канал настройки зоны нечувствительности компаратора пере,1 страиваемых по частоте фильтров высокой и низкой частот позволяет при любой скорости прокатки выдерживать постоянным произведение Тфш где Тф - эквивалентная постоянная фильтра, э частота эксцентриситета валков, благодаря чему амплитуда сигнала на выходе фильтра высоких частот и срответственно на втором входе компаратора (выход фильтра низкой частоты) не зависит от скорости прокатки и всегда равняется амплитуде эксцентриситета валков. Благодаря этому можно исключить дополнительные стабилизирующие блоки н связи (ключ, элемент задержки, четвертый сумматор, источник опорного напряжения и т.д.), т.е. упростить устройство. Исполнение перестраиваемых фильтров высоких и низких частот в виде последовательно соединенных сумматора и интегратора, управляемых широтно-импульсным модулятором, позволяет осуществить линейную зависимость между полосой пропускания фильтров и скоростью прокатки и унифицировать конструкцию устройства в целом. Частота широтно-импульсного модулятора выбирается на несколько порядков выше верхней частоты эксцентриситета валков. Отношение t/T у широтноимпульсного модулятора, где Т время вьвдачи управляющего сигнала и соответственно время нахождения второго и третьего интеграторов в режиме интегрирования, а Т - полный период колебаний модулятора,- пропорционально управляющему сигналу (скорости прокатки), -Благодаря этому эквивалентная постоянная интегрирования второго и третьего интеграторов уменьшается обратно пропорционально скорости прокатки, а следовательно, произведение жш остается постоянным. Таким образом, введение новых блоков и связей позволяет увеличить точность работы устройства при одновременном упрощении его конструкции . На фиг.1 приведена функциональная схема устройства; на фиг.2 - вариант исполнения перестраиваемых фильтров высокой и низкой частот. Устройство содержит следящую систему, состоящую из сумматора 1 и интегратора 2/ охваченных отрицательной обратной связью, компаратор 3 первый вход которого соединен с цыходом сумматора 1, а выход с управляющим входом интегратора 2, блок 4 модуля, перестраиваемые по частоте фильтры высокой 5 и низкой 6 частот, вход фильтра 5 высокой частоты соединен с выходом сумматора 1, а выход - со входом блока 4 модуля, выход блока 4 модуля соединен со входом фильтра 6 низкой частоты,-выход которого соединен со вторым входом компаратора 3, первый вход сумматора 1 соединен с датчиком усилия прокатки 7, управляющие входы фильтров б низкой и 5 высокой частоты соединены с датчиком 8 скорости прокатки, а выход интегратора является выходом устройства.
Перестраиваемые по частоте фильтры высокой 5 и низкой б частоты содержат (фиг,2) соответственно сумматор 9 и интегратор 10 и сумматор 11 и интегратор 12, охваченные отрицательными обратными связями и широтноимпульсные модуляторы 13, входы которых соединены с датчиком 8 скорости прокатки, а выходы - с управляющими входами интеграторов 10-и 12.
Устройство работает следующим образом.
На выходе сумматора I выделяется сигнал отклонения усилия прокатки от значения, запомненного интегратором 2, и поступает на первый вход компаратора 3. Из этого сигнала в фильтре 5 высокой частоты выделяется составляющая, -вызванная эксцентриситетом валков, выпрямляется в блоке 4 и сглаживается фильтром б низко-й частоты. С выхода фильтра б постоянный сигнал, пропорциональный амплитуде эксцентриситета валков, поступает на второй вход компаратора 3. Если сумма полезной доставляющей сигнала усилия прокатки и сигнала эксцентриситета валков на первом входе компаратора 3 по модулю .больше сигнала/ поступеиощего с фильтра б, компаратор срабатывает и переводит интегратор 2 в режим Интегрирования . Интегратор отслеживает полезную составляющую сигнала усилия прокатки до тех пор, пока не закроется компаратор 3 и не переведет интегратор 2 в режим Память. Частота среза фильтров 5 и б изменяется прям пропорционально сигналу скорости прокатки, поступсиощему от датчика 8, так как скважность, сигнала широтноимпульсного модулятора 13 прямо пропорциональна скорости прокатки. Благодаря этому, чем больше скорость прокатки-, тем большую часть периода модулятора интеграторы 10 и 12 находятся в режиме интегрировё1Ния, что равноценно уменьшению их эквивалентной постоянной интегрирования. Погрешность данного устройства в 2 раза меньше, чем у описанного выше, и составляет порядка 5 т по усилию прокатки или 10 мкмм по толщине. Благодаря этому уменьшается среднеквадратическое отклонение толщины полосы на 3 мкмм, что обеспечивает дополнительное приближение к нижней границе минусового допуска и увеличение выхода годного в среднем на 0,2%.
Расчетный экономический эффект составляет 80,000 тыс. руб. на кажды миллион тонн проката.
Э ДА-С ..SO руб/т.0
80000 руб,
где ДА - увеличение выхода готового,
т;
С - себестоимость 1 т листового , к проката/ руб/т; jj--0,5 - коэффициент реализации проката по полезной площади.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для компенсацииэКСцЕНТРиСиТЕТА ВАлКОВ пРи ABTO-МАТичЕСКОМ РЕгулиРОВАНии ТОлщиНыпРОКАТыВАЕМОй пОлОСы | 1979 |
|
SU818691A1 |
| Система автоматической настройки эквивалентной жесткости клети | 1980 |
|
SU884769A1 |
| Устройство для фильтрации эксцентриситета валков при автоматическом регулировании толщины полосы | 1982 |
|
SU1063496A1 |
| Устройство автоматического регулирования толщины полосы | 1982 |
|
SU1044363A1 |
| Устройство для автоматического регулированияТОлщиНы пРОКАТА | 1979 |
|
SU806188A2 |
| Устройство для автоподстройки зоны нечувствительности | 1982 |
|
SU1045969A1 |
| Устройство автоматического регулирования толщины прокатываемой полосы | 1990 |
|
SU1731321A1 |
| Устройство для автоматического поддержания постоянной толщины проката | 1980 |
|
SU908456A1 |
| Устройство управления приводом нажимных винтов клети прокатного стана | 1981 |
|
SU984532A1 |
| Устройство для определения жесткостипОлОСы B пРОцЕССЕ НЕпРЕРыВНОй гОРячЕйпРОКАТКи | 1979 |
|
SU848110A1 |
1. УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ЭКСЦЕНТРИСИТЕТА ВАЛКОВ ПРИ АВТС 1АТИЧЕСКОМ РЕГУЛИРОВАНИИ ТОЛЩИНЫ ПОЛОСЫ, содержгиаее следшцую систему, включающую последовательно соединенные сумматор и интегратор, охваченные отрицательной обратной связью, компаратор, первый вход которого соединен с выходом сумматора, а выход - с управляющим входом интегратора, и блок модуля, о т л ичающееся тем, что, с целью повышения точности работы и упрощения конструкции устройства, оно дополнительно содержит перестраиваемые по частоте фильтры высокой и .низкой частот, причем вход фильтра высокой частоты также соединен с выходом сумматора, а выход - с входом блока, модуля, выход блока модуля соединен с входом фильтра низкой частоты, выход которого соединен с входом компаратора, а управляющие входы фильтров высокой и низкой частот соединены с датчиком скорости прокатки, введенным в устройство. 2. Устройство по п. 1, отличающееся тем, что перестраиваемые по частоте фильтры высокой и низкой частот состоят кгикдый кз последовательно соединенных соответственно второго и третьего сумматора и второго и третьего интеграторов, охваченных отрицательными обратными с связями, и широтно-импульсного модулятора, причем-входы широтно-импульс-Я ных модуляторов являются управляющими входами фильтров, а выходы соединены с управляющими входами второго и третьего интеграторов, входами фильтров являются входы второго и третьего сумматоров, выходом фильтра высокой частоты является выход второго сумматора, а выходом фильтра низкой частоты является выход третьего интегратора. S1 ТГ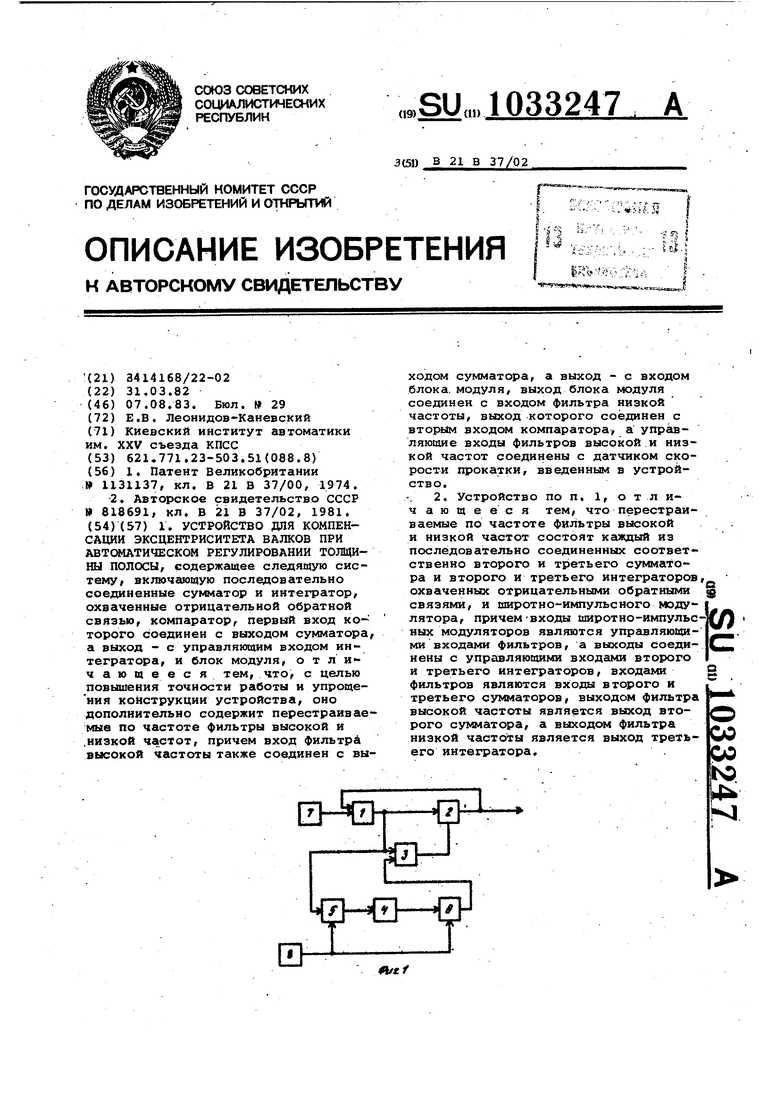
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Великобритании 1131137, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
