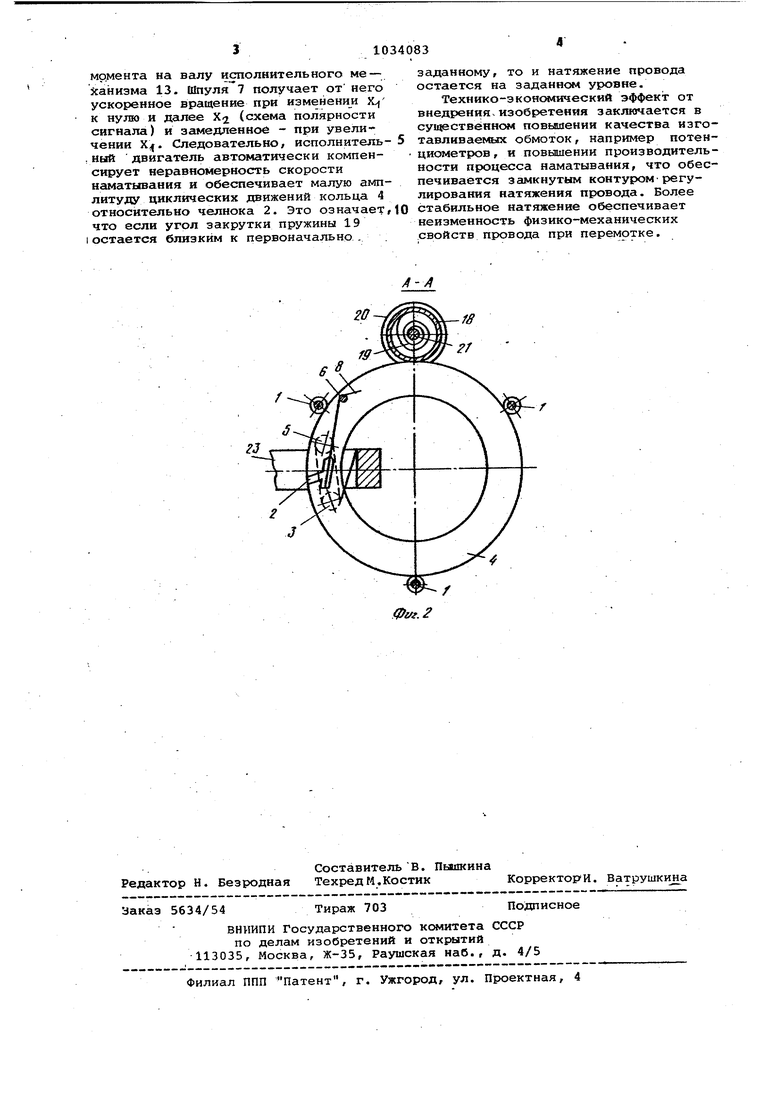
Изобретение относится к оборудо вйнию для получения обмоток на коль цевых каркасах преимущественно сред них и крупных габаритов и может быт использовано в электротехнике. Известен станок для намотки провойа на кольцевой каркас, содержащи о снование, челнок с нитепроводником связанный с приводом вращения, шпулю с запасом провода, установленную сЪосно челноку, и датчик натяжения провода, включающий кольцо с нитепроводником, расположенное между шпулей и челноком соосно им и подпр жиненное к челноку Г ЗОднако известный станок не обеспечивает регулирования натяжения привода в процессе намотки, что ухудшает качество обмоток. Цель изобретения - повышение качества намотки за счет регулирования натяжения провода в процессе намотки, Поставленная цель достигается тем, что станок для намотки провода на кольцевой каркас, содержащий основание, челнок с нитепроводником, связанный с приводом вращения шпулю с запасом провода, установленную соосно челноку, и датчик натяжения провода , включающий кольцо с нитепроводником, расположенное между шпулей и челноком соосно им и подпружиненное к челноку, , снабжен исполнительным механизмом, датчиком положения и дифференциальн механизмом, . при этом датчик натяжен связан с входом датчика положения, выход которого через усилитель-прео разователь связан с исполнительным механизмом, одно колесо дифференци ального механизма кинематически свя зано с челноком, другое - с валом исполнительного механизма, а вал дифференциального механизма - со шпулей. На фиг. 1 изображен станок, на фиг. 2 - разрез А-А на фиг. 1. Устройство содержит основание 1 вращающиеся соосно челнок 2 с нитепроводника1«ш 3, кольцо 4 с нитепрово никами 5 и б и шпулю 7 с запасом провода 8. Шпуля 7 через колесо 9 и вал 10, сателлиты 11 и колесо 12 дифференциального механизма связана с валом исполнительного механизма. 1 лзооД -которого подключен, например, через усилитель-преобразователь 14 к выходу 15 датчика 16 положения. Вхбд (рычажок) 17 датчика 16 положе ния кинематически связан с выходом (резьбовая втулка) 18 датчика натя жения. Вход (вал) датчика натяжени кинематически связан с челноком 2 и через пружину 19 с йзмерительньм к ольцом 4. Привод 20 соединен, с валом 21 и через механизм 22 с Обмйтываемым каркасом 23. Второе кол Ь дифференциального механизма вязано с приводом 20. Нитепроводик б может быть укреплен на шпуле 7. Устройство работает следующим бразом. Конец провода 8 со шпули 7 пропускается .через паз кольца 4, по нитероводникам 5,, 6 и 3 и крепится на каркасе 23 таким образом, чтобы пружина 19 была закручена на некоторый угол от начального положения. При этом вход (рычажок) 17 датчика 16 положения сместится относительно нулевого положения на величину пропорциональную Х, необходимую для обеспечения управляющего сигнала на выходе 15 датчика положения (J , где К - коэффициент пропорциональности. Затем включаются цепи питания датчика 16 положения , усилителя-преобразователя L4 и исполнительного механизма 13. Напряжение 0 КХ обеспечивает при этом тормозной момент на валу исполнительного механизма 13. Он приложен через колесо 12, сателлиты 11 и вал 10 дифференциального механизма и через колесо 9 к шпуле 7 и удерживает через провод 8 и измерительное кольцо 4 пружину 19 в положении заданной ранее деформации. Провод 8 при этом находится под заданным натяжением. После включения привода 20 его вал 21 начинает вращаться и вращает челнок 2. Нитепроводник 3 увлекает провод 8 и обматывает им каркас 23. Шпуля 7 при этом получает вращение от привода 20 через дифференциальный механизм и колесо 9. Если скорость наматывания равномерна, то измерительное кольцо 4 и челнок 2 вращаются с одинаковой угловой скоростью и выход (резьбовая втулка) 18 датчика натяжения неподвижен, т.е. не имеет линейных перемещений. Следовательно, величина Х| постоянна., и на валу исполнительного двигателя 13 имеется тормозной момент, который обеспечивает постоянство заданного натяжения, урав- новешиваемое моментом, от пРУЖины 19. I В случае наматывания на эксцентрично установленный или некруглого (Поперечного сечения каркас 23 скорость наматывания в течение одного оборота челнока 2 непрерывно изменяется. При постоянной скорости вращения челнока 2 измерительное кольцо 4 совершает относительно него циклические колебания. Это приводит к появлению на выходе 18 датчика натяжения разности угловых положений линейных перемещений / которые через вход 17 датчика 1б положений обеспечива1ют изменение величины Х. Это изменение преобразуется в изменение
момента на валу исполнительного ме- 5саниэма 13. Шпуля 7 получает от него ускоренное вращение при изменении к нулю и далее Х (схема полярности сигнала) и замедленное - при увеличении Х,(. Следовательно, исполнитель,ный двигатель автоматически компенсирует неравномерность скорости наматывания и обеспечивает малую амплитуду циклических движений кольца 4 относительно челнока 2. Это означает что если угол закрутки пружины 19
I остается близким к первоначально заданному, то и натяжение провода остается на заданном уровне.
Технико-экономический эффект от внедрения.изобретения заключается в су1«ествённом повышении качества изготавливае14&1Х обмоток, например потенциометров , и повышении производительности процесса наматывания, что обеспечивается замкнутым контуром регулирования натяжения провода. Более стабильное натяжение обеспечивает неизменность физико-механических свойств прювода при перемотке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для намотки провода на кольцевой каркас | 1981 |
|
SU1023421A1 |
| Намоточный станок | 1979 |
|
SU858128A1 |
| Намоточный станок | 1981 |
|
SU995135A2 |
| Устройство для натяжения провода | 1981 |
|
SU959174A1 |
| СТАНОК ДЛЯ ТОРОИДАЛЬНОЙ НАМОТКИ КАРКАСОВ ПНЕВМАТИЧЕСКИХ ШИН | 1970 |
|
SU284293A1 |
| Устройство для обмотки кольцевого сердечника длиномерным материалом | 1983 |
|
SU1175847A1 |
| Станок для намотки провода на тороидальный каркас | 1984 |
|
SU1180995A1 |
| Станок для изготовления электрических катушек | 1973 |
|
SU510756A1 |
| Устройство для намотки катушек | 1981 |
|
SU997112A1 |
| Станок для намотки тороидальных сердечников | 1981 |
|
SU957289A1 |
СТАНОК ДЛЯ НАМОТКИ ПРОВОДА НА КОЛЬЦЕВОЙ КАРКАС, содержащий рснованиев челнок с нитепроводником, связанный с приводом вращения, шпулю q запасом провода, установленную соосно челноку, и датчик натяжения провода, включающий кольцо с нитепроводником, расположенное между шпулей и челноком соосно им и подпружиненное к челноку,о т л и ч а ю щ JC я тем, что , с целью повышения качества намотки за счет регулирования натяжения провода в процессе намотки, он снабжен исполнительнЕом механизмом, датчиком положения и дифференциальным механизмом,- при этом датчик натяжения связан с входом датчика положения, выход которого через усилитель-преобразователь связан с исполнительным механизмом, одно колесо дифференциального механизма кинематически связано с челноком, другое - с валом исполнительного механизма, а вал дифференциального механизма - со шпулей. S (Л 00 41211 о ЭО :о
/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке 3247872/06, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
