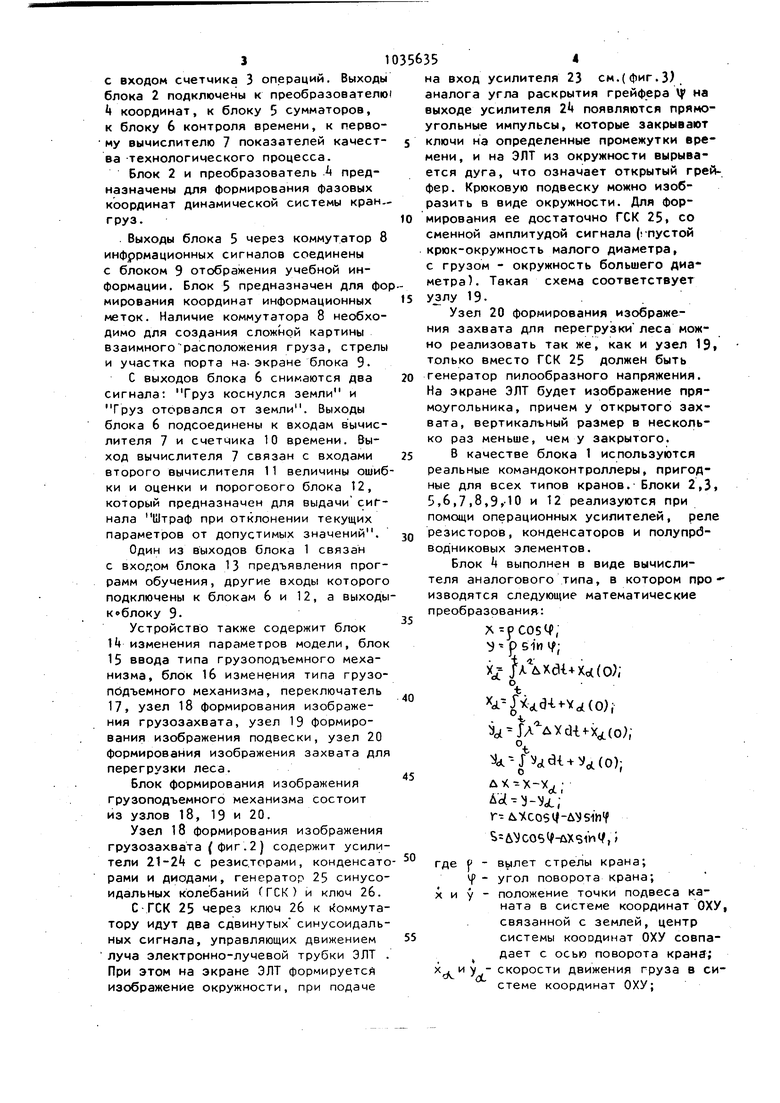
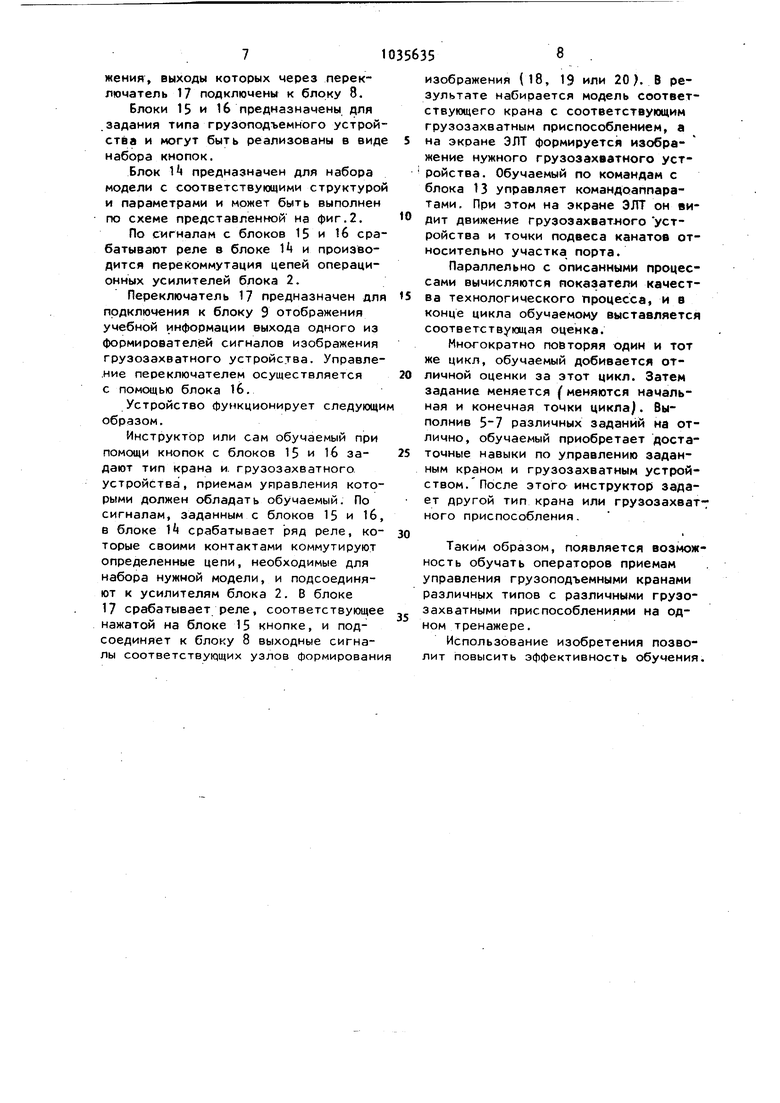
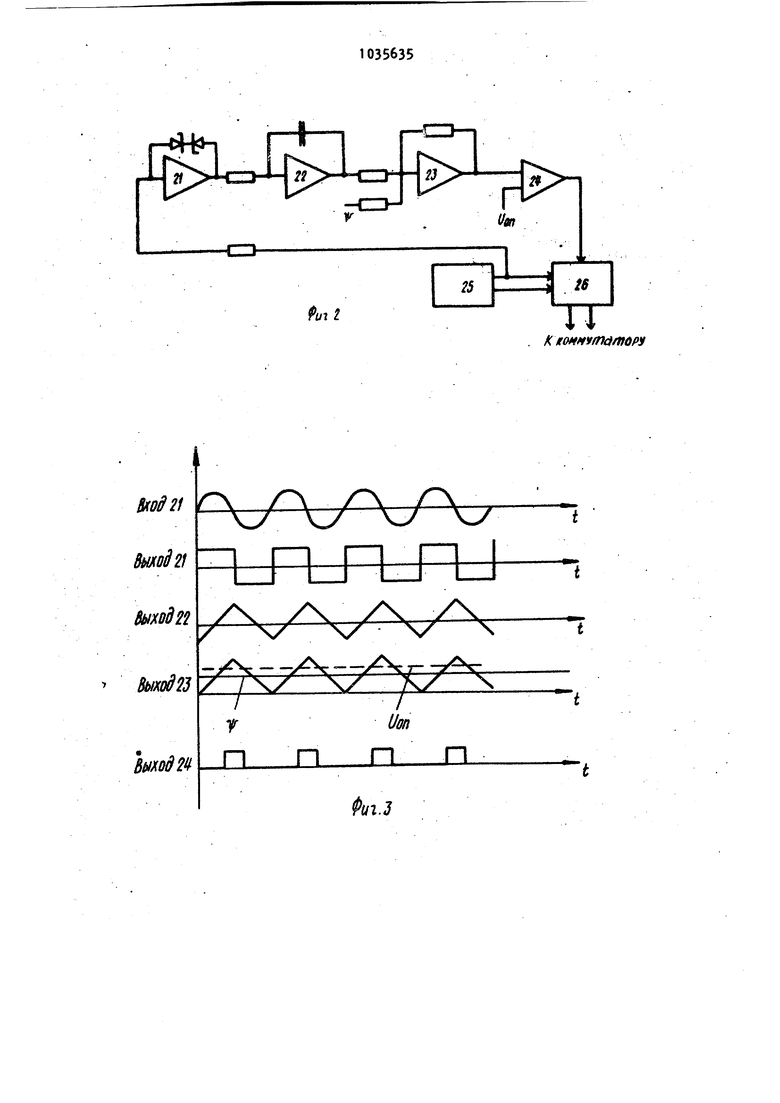
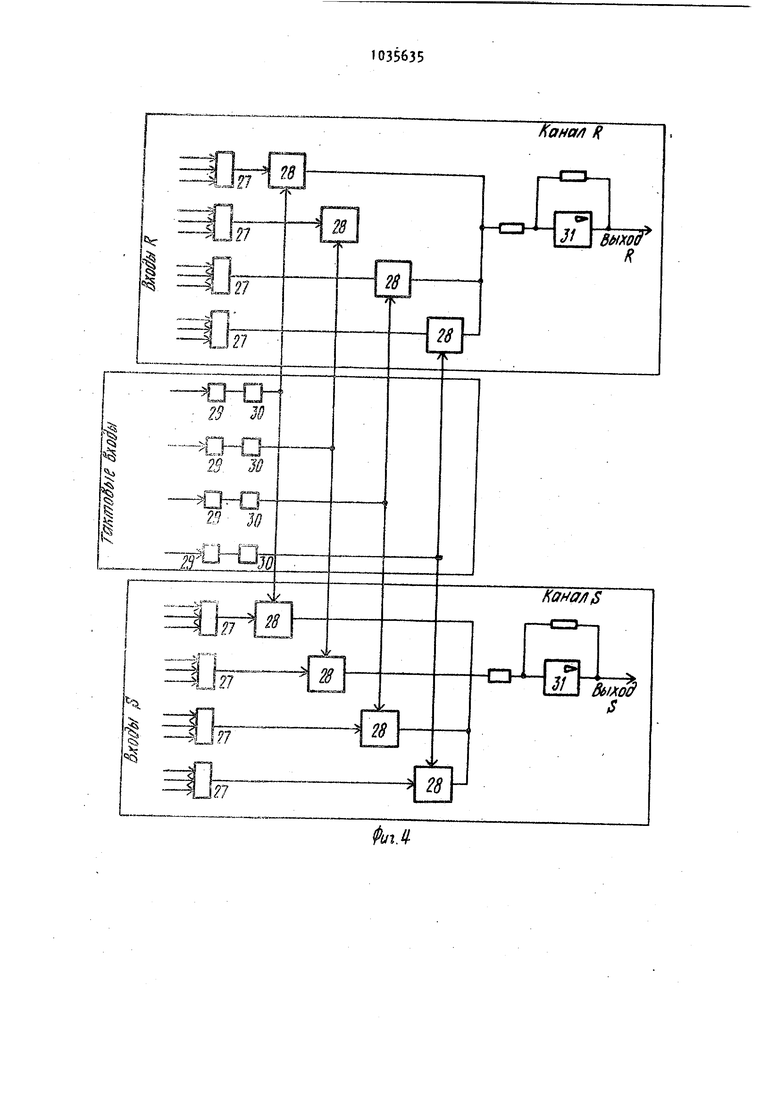
Изобретение относится к тренажерам дпй профессиональной подготовки .операторов грузоподъемных машин. Известно устройство для обучения операторов грузоподъемных машин, содер) блок моделирования комамдоаппаратов управления, соединенный с блоком моделирвания грузоподъемных механизмов, блоком предъявления программ обучения и счетчиком операций, блок контроля времени, саязанный со сметчиком времени, первым вычислителем и блоком моделирования грузоподъемных механизмов, подключенным к преобразователю координат, связанному с блоком отображения учебной информации, соединенным с блоком предъявления программ обучения, счетчиком операций, счетчиком времени, вторым вычислителем и комму Тагором, подключенным через блок сум маторов к преобразователю координат, первому вычислителю и блоку моделирования грузоподъемных механизмов, пороговый блок, связанный с вычислителями, коммутатором и блоком предъявления программ обучения, второй вычислитель подсоединен к первому вычислителю, счетчику времени и счет чику операций f .1 3Недостатком известного устройства является невысокая эффективность обучения. 14ель изобретения - повышение эффективности обучения. -Поставленная цель достигается тем что устройство для обучения операторов грузоподъемных машин, содержащее блок моделирования командоаппаратов управления, соединенный с блоком моделирования грузоподъемных механизмо блоком предъявления программ обучения и счетчиком операций, блок контроля времени, связанный, со счетчиком времени, первым вычислителем и блоком моделирования грузоподъемных мв ханизмов, подключенным к преобразователю координат, связанному с блоком отображения учебной .информации, соединенным с блоком предъявления программ обучения, счетчиком времени вfopым вычислителем и коммутатором, подключенным через блок сумматоров к преобразователю координат, первому вычислителю и блоку моделирования грузоподъемных механизмов, пороговый блок, связанный с. вычислителями, ком мутатором и блоком предъявления прог рамм обучения, второй вычислитель подсоединен к первому вычислителю, счетчику времени и счетчику операций, имеет блок ввода типа грузоподъемного механизма, блок изменения типа , грузоподъемного механизма, блок изменения параметров модели, блок формирования изображения грузоподъемного механизма и переключатель, первые входы которого соединены с выходами блока формирования изображения , входы которого подключены к информационному выходу блока моделирования грузоподъемных механизмов второй вход переключателя подключен к первому входу блока изменения типа грузоподъемного механизма, второй вход которого соединен с первым входом блока изменения параметров модели, второй вход которого связан с выходом блока ввода типа грузоподъемного механизма, третий вход блока изменения параметров модели, второй вход которого связан с выходом ввода типа грузоподъемного механизма, третий вход блока изменения параметров модели подключен к управляющему выходу блока моделирования грузоподъемных механизмов, управляющий вход которого связан с выходом блока изменения параметров модели, причем выход переключателя соединен с управляющим входом коммутатора,« На фиг. 1 изображена структурная схема устройства; на фиг.2 - схема узла формирования изображения грузозахвата; на фиг. 3 временная диаграмма, поясняющая работу узла формирования изображения грузозахвата; на фиг. i схема коммутатора; на фиг. 5 конструктивная схема блока отображения учебной информации. Устройство( фиг.1 ) содержит блок 1 моделирования командоаппаратов управления моделями мезанизмов крана. Выходными сигналами блока 1 являются переключения командоконтроллеров механизмов изменения вылета стрелы, поворота крана и- подъема груза. Выход блока 1 связан с входом блока 2 моделирования грузоподъемных механизмов, включающего в себя модели трех основных механизмов крана: механизма изменения вылета, механизма поворота крана, механизма подъема груза, состоящего из подъемной и замыкающей лебедки - и моделей грузозахватных приспособлений, а также с входом счетчика 3 операций. Выходы блока 2 подключены к преобразователю координат, к блоку 5 сумматоров, к блоку 6 контроля времени, к первому вычислителю 7 показателей качества технологического процесса. Блок 2 и преобразователь А предназначены для формирования фазовых координат динамической системы крангруз. Выходы блока 5 через коммутатор 8 инфррмационных сигналов соединены с блоком 9 отображения учебной информации. Блок 5 предназначен для фо мирования координат информационных меток. Наличие коммутатора 8 необходимо для создания сложной картины взаимного расположения груза, стрелы и участка порта на- экране блока 9. С выходов блока 6 снимаются два сигнала: Груз коснулся земли и Груз оторвался от земли. Выходы блока 6 подсоединены к входам вычислителя 7 и счетчика 10 времени. Выход вычислителя 7 связан с входами второго вычислителя 11 величины ошиб ки и оценки и порогового блока 12, который предназначен для выдачи сигнала Штраф при отклонении текущих параметров от допустимых значений. Один из выходов блока 1 связан с входом блока 13 предъявления программ обучения, другие входы которого подключены к блокам 6 и 12, а выходы к блоку 9Устройство также содержит блок I изменения параметров модели, блок 15 ввода типа грузоподъемного механизма, блок 1б изменения типа грузоподъемного механизма, переключатель 17, узел 18 формирования изображения грузозахвата, узел 19 формирования изображения подвески, узел 20 формирования изображения захвата для перегрузки леса. Блок формирования изображения грузоподъемного механизма состоит из узлов 18, 19 и 20. Узел 18 формирования изображения грузозахвата (фиг.2) содержит усилители 21-24 с резисторами, конденсато рами и диодами, генератор 25 синусоидальных колебаний (ГСК) и ключ 26. С-ГСК 25 через ключ 26 к (Коммутатору идут два сдвинутых синусоидальных сигнала, управляющих движением луча электронно-лучевой трубки ЭЛТ . При этом на экране ЭЛТ формируется изображение окружности, при подаче на вход усилителя 23 см.(фиг.3). аналога угла раскрытия грейфера на выходе усилителя 2k появляются прямоугольные импульсы, которые закрывают ключи на определенные промежутки времени, и на ЭЛТ из окружности вырывается дуга, что означает открытый грейфер . Крюковую подвеску можно изобразить в виде окружности. Для формирования ее достаточно ГСК 25, со сменной амплитудой сигнала (;пустой крюк-окружность малого диаметра, с грузом - окружность большего диаметра). Такая схема соответствует 19. Узел 20 формирования изображения захвата для перегрузки леса можно реализовать так же, как и узел 19, только вместо ГСК 25 должен быть генератор пилообразного напряжения. На экране ЭЛТ будет изображение прямоугольника, причем у открытого захвата, вертикальный размер в несколько раз меньше, чем у закрытого. В качестве блока 1 используются реальные командоконтроллеры, пригодные для всех типов кранов. Блоки 2,3, 5,6,7,8,9,10 и 12 реализуются при помощи операционных усилителей, реле резисторов, конденсаторов и полупрбводниковых элементов. Блок k выполнен в виде вычислителя аналогового типа, в котором производятся следуюи1ие математические преобразования: COSM, V pSIMif; Хл|л хаихс1(о;; Xr-Яudt -У(0)i -1л дуа-14-х(о;; °t l--JV ei-.V(0); Ao((L r-u.ycosif-u sihf &VCOSV-uXSintf,; где f - вылет стрелы крана; f - угол поворота крана; X и у - положение точки подвеса каната в системе координат ОХУ, связанной с землей, центр системы координат ОХУ совпадает с осью поворота крана; у - скорости движения груза в системе координат ОХУ; X и у ,. - координаты груза в системе координат ОХУ; Л круговзй частота свободных колебаний груза, подвешенно на капоте; г и S - координаты груза в подвижно системе координат O., св занной со стрелой крана, точка подвеса канатов, плоскость параллельна плоскости земли, ось со падает с проекцией стрелы ,н землю. Умножение на sin, и cos производится при помощи синусно-косинусн потенциометров, механически связанных с электромеханической следяющей системой, на вход которой поступает аналог - скорости поворота крана. На вход блока поступают аналог и у, с выхода снимаются аналоги х , У , Г И S. Блок б выполнен в виде вычислите аналого-дискретного типа, в котором реализуется следующее выражение: 11 j если Z О . О, если Z О , где а - сигнал на выходе блока 6; Z - высота крюка (груза; относительно земли. Блок 7 может быть вычислителем аналогового типа, в котором производится вычисление.по следующим фор мулам : .to); м --Ktv;); ,(-fc) ,х-- гП-1ИвП1 где уо скорость отрыва груза; скорость намотки каната на барабан; вертикальная скорость груз при установке на землю; горизонтальная скорость груза при установке на зем лю; максимальное горизонтально отклонение груза от точки подвеса канатов; момент отрыва груза от зем ли; момент установа груза HSi землю. На вход блока 7 поступают аналоги V, , г , S и а с выхода сни k ot и « V V маются аналоги Vp , Блок 8 (фиг. ) состоит из резисторных сумматоров 27, транзисторных ключей 28, усилителей-согласователей 29, трансформаторов 30 и масштабных усилителей 31 Входные сигналы поступают через резисторные сумматоры 27 на ключи 28, которые управляются через усилитель-согласователь 29 и трансформатор 30 (для гальванической развязки так, что каждую четверть периода управления открыты только два ключа (один по координате R, другой по координате S). Блок 9 фиг.5 реализуется при помощи ,электронно-лучевого индикатора (ЭЛИ), на который подаются сигналы с выхода коммутатора, и оптической проекционной системы. Изображение участка местности порта проецируется на экран ЭЛИ с диапозитива, закрепленного на оси электродвигателя интегрирующей следящей системы блока . Блок 11 может быть вычислителем аналогового типа, в котором производятся вычисления по следующим формулам:A -- VK2V5+K v5 K4e; emay4V% где Д 21 суммарная ошибка; & - оценка; wax максимальная оценка; 1ц - время цикла; N - число включения за цикл; коэффициенты пропорциональности. ,tCt Блок 13 представляет собой автомат, выполненный на базе аналоговой вычислительной техники, который выдает управляющие сигналы на включение командоконтроллера вылета поворота. При этом сигналы выдаются в виде стрелок на экране ЭЛИ. Блок 2 подключен к блоку l изменения параметров модели, входы которого подключены к выходам блока 15 ввода типа грузоподъемного механизма и блока 16 изменения типа грузоподъемного механизма, выход которого подключен к переключателю 17. Один из выходов блока 2 связан с входом узов 18, 19 и 20 формирования изображения, выходы которых через переключатель 17 подключены к блоку 8. Блоки 15 и 16 предназначены для .задания типа грузоподъемного устройства и могут быть реализованы в виде набора кнопок. Блок I предназначен для набора модели с соответствующими структурой и параметрами и может быть выполнен по схеме представленной на фиг.2. По сигналам с блоков 15 и 1б сра батывают реле 8 блоке lA и производится перекоммутация цепей операционных усилителей блока 2. Переключатель 1 предназначен для подключения к блоку 9 отображения учебной информации выхода одного из формирователей сигналов изображения грузозахватного устройства. Управле.ние переключателем осуществляется с помощью блока 1б. Устройство функционирует следующи образом. Инструктор или сам обучаемый при помощи кнопок с блоков 15 и 1б задают тип крана и. грузозахватного устройства, приемам управления которыми должен обладать обучаемый. По сигналам, заданным с блоков 15 и 1б в блоке И срабатывает ряд реле, которые своими контактами коммутируют определенные цепи, необходимые для набора нужной модели, и подсоединяют к усилителям блока 2. В блоке 1 срабатывает реле, соответствующее нажатой на блоке 15 кнопке, и подсоединяет к блоку 8 выходные сигналы соответствук1щих узлов формировани изображения (18, 19 или 20). В результате набирается модель соответствующего крана с соответствующим грузозахватным приспособлением, а на экране ЭЛТ формируется изображение нужного грузозахватного устройства. Обучаемый по командам с блока 13 управляет командоаппаратами. При этом на экране ЭЛТ он видит движение грузозахватлого устройства и точки подвеса канатов относительно участка порта. Параллельно с описанными процессами вычисляются показатели качества технологического процесса, и в конце цикла обучаемому выставляется соответствующая оценка. Многократно повторяя один и тот же цикл, обучаемый добивается отличной оценки за этот цикл. Затем задание меняется {меняются начальная и конечная точки цикла. Выполнив различных заданий на отлично, обучаемый приобретает достаточные навыки по управлению заданным краном и грузозахватным устройством. После этого инструктор задает другой тип крана или грузозахватного приспособления. Таким образом, появляется возможность обучать операторов приемам управления грузоподъемными кранами различных типов с различными грузозахватными приспособлениями на одном тренажере. Использование изобретения позволит повысить эффективность обучения.
ана/} R
W
11
27
3
31
Birixod
I
27
ina
28
/sr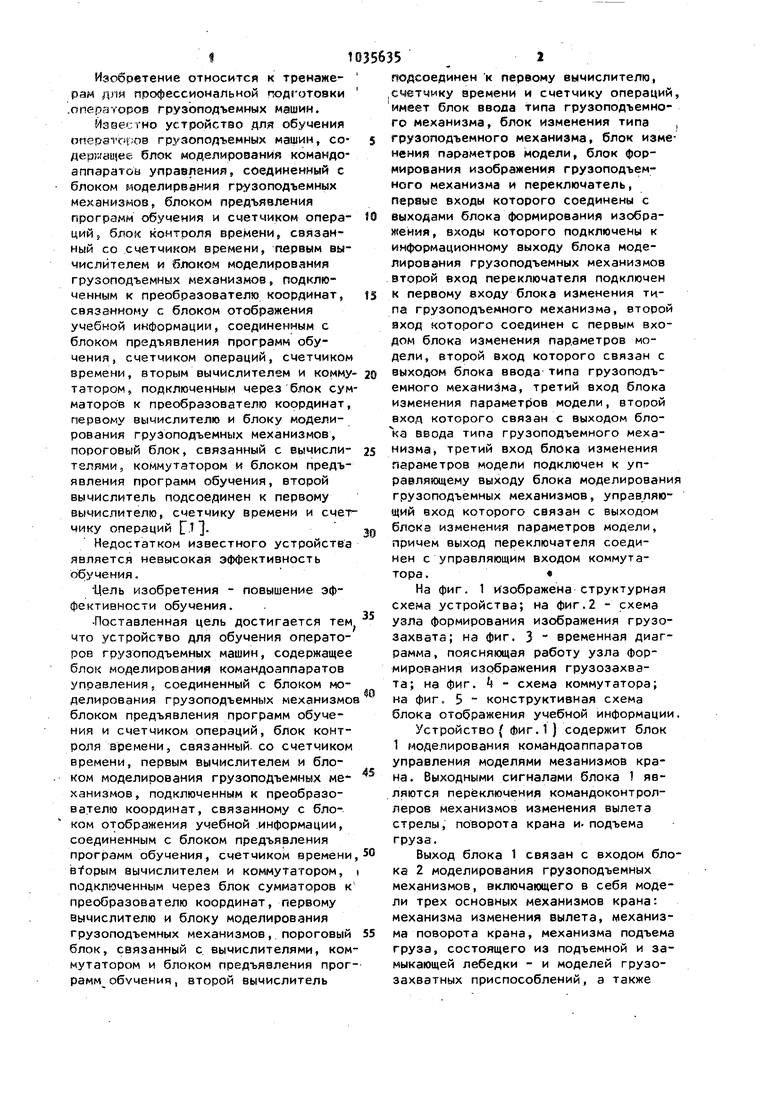
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обучения операторов грузоподъемных машин | 1978 |
|
SU769602A1 |
| Тренажер крановщика | 1983 |
|
SU1108484A1 |
| Тренажер оператора грузоподъемных машин | 1982 |
|
SU1081645A1 |
| Устройство для обучения операторовКРАНОВ | 1979 |
|
SU830506A1 |
| Тренажер для обучения оператора грузоподъемной машины | 1974 |
|
SU521593A1 |
| Тренажер операторов грузоподъемных устройств | 1981 |
|
SU964702A1 |
| Тренажер крановщика поворотного крана | 1978 |
|
SU743014A1 |
| Тренажер операторов грузоподъемных устройство | 1977 |
|
SU691916A1 |
| Устройство для обучения крановщика | 1980 |
|
SU911590A1 |
| Имитатор визуальной обстановки тренажера крановщика | 1988 |
|
SU1569866A1 |


3S
29
D 28
D
ж.
1™- IУ
2S
21
Кана/1$
28
I
$LJ.7
f7
-id
(У Проекционный объектив От конмутатора И/.5 Диаподими HcywHUK ск/па Конденсор
