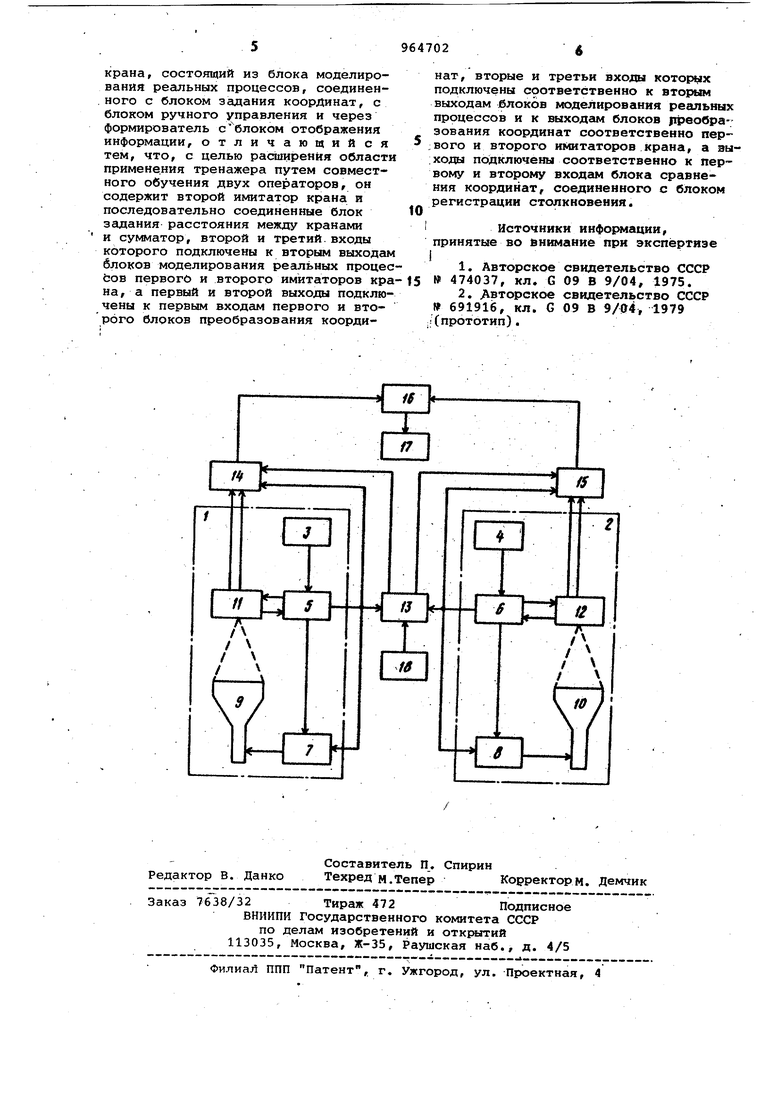
дам блоков моделирования реальных процессов первого и второго имитаторов крана, а первый и второй выходы подключены к первым входам первого и второго блоков преобразования координат, вторые и третьи входы которых подключены срответственно к вторым выходам блоков моделирования реальных процессов и к -выходам блоков преобразования координат соот ветственно первого и второго имитаторов крана а выходы подключены соответственно к первому и второму входам блока сравнения координат, соединенного с блоком регистрации столкновения. . На чертеже представлена функциональная схема тренажера. Тренажер операторов грузоподъем.. ных устройств содержит первый имитатор 1 крана и второй имитатор 2 крана, состоящие из блоков 3 и 4 ручного управления, блоков 5 и 6 моделирования реальных процессов, формирователей 7 и 8, блоков 9 и 10 отображения информации и блоков 11 и 12 задания координат, сумматор 13, первый блок 14 преобразования координат второй блок 15 преобразования коорди нат, блок 16 сравнения координат, блок 17 регистрации столкновения и блок 18 задания расстояния между кранами. о Тренажер операторов грузоподъемны устройств работает следующим образом На экранах блоков 9 и .10 отображения информации с помощью блоков 11 и 12 задания координат и формировате лей 7 и 8 формируются световые изображения , имитирующие визуальную Обстановку, наблюдаемую реально из кабины крана, видимое изображение включает в себя, во-первых, картину той части производственного участка в сторону которого повернут кран, инфХмаи во-вторых, ряд подвижных са , дионных меток: Точка подвеса Стрела - световая окружность диаметром 10 мм или прямая световая линия, Грузозахватный орган или Груз - светрвая окружность диаметром 2Q мм, Высота груза - наклонная световая линия, исходящая из центра световой окружности, обозначающей груз, которые могут переме.щатвся относительно картины производ ственного участка и изменять свое положение и состояние в зависимости от действия управляющего тренажёром человека. С помощью блоков 3 и 4.руч ного управления обучаемые к рановщик передают команды управления в блоки 5 и б моделирования реальных процессов, прив.одя тем самым в действие аналоговые модели механизмов кранов что, в свою очередь, вызывает изменение наблюдаемой ими обстановки на экранах блоков 9 и 10 отображения информации. При определенном взаимном расположении первого и второго кранов А и Б на экранах блоков 9 и 10 отображения информации появляются изображения Стрела и Груз соседнего крана. Так на экране блока 9 отображения информации появляется изображение Стрела и Груз второго крана, и, наоборот, на экране блока 10 отображения информации - изображение Стрела и первого крана. Местоположение информационных меток Стрела и Груз соседнего крана на экранах блоков 9 и 10 отображения информации зависит от текущего взаимного положения первого и второго кранов, задаваемого углами поворота f и V« , которые определяются положением . 12 задания координат и положЙие блоков 14 и 15 | «., преобразования.координат. Кроме того, взаимное положение первого и второго кранов определяется расстоянием между кранами, задаваемым блоком 18. кранами, задаваемым блоком 1J Ш входы блоков 14 и 15 преобразования координат поступгиот сигналы, соответствующие декартовым координатам точек подвеса и грузов и х,,во взаимных системах координат, т.е. координаты точки подвеса и груза первого крана в системе координат второго крана и наоборот. „ „ Взаимные декартовые координаты х,„ j,, Хж, ,. вычйсляютТсу аторе 13. Блоки 14 и 15 преобразования координат могут быть выполнены, например, с использованием синусно-косинусных потенциометров и сум; аторов,постро „ на операционных усилителях. С помощью блоков 14 и 15 производятся следующие преобразования Pl.-V«P..V- (Р,г а ° Ра-%в .; si %il5ia -V,iC05 iPoii Vco i VPon - iaCosfa;|Soi -XilS1« -t; {Soi4 «S H4i; ,, ( Ргг Ъ1 г 2 п ; cosv, eiM f,; IM cosfa-x ein С помощью блока 16 происходит срав нение аналогов координат Точек подвеса и Грузов первого и второго кранов. При равенстве сигналов аналогов координат Стрел и Грузов первого и второго кранов на вход блока 17 регистрации столкновения выдается сигнал о столкновении кранов. Введение указанных блоков и связей позволяет проводить совместное обучение двух операторов кранов. Формула изобретения - Тренажер операторов грузоподъемных устройств, содержащий имитатор
крана, состоящий из блока моделирования реальных процессов, соединенного с блоком задания координат, с блоком ручного управления и через формирователь сблоком отображения информации, отличающийся тем, что, с целью расширения области применения тренажера путем совместного обучения двух операторов, он содержит второй имитатор крана и последовательно соединенные блок задания расстояния между кранами и сумматор, второй и третий.входы которого подключены к вторым выходг№1 блоков моделирования реальных процессов первого и второго имитаторов крана, а первый и второй выходы подключены к первым входам первого и второго блоков преобразования координат, вторые и третьи входы которых подключены соответственно к вторым выходам блоков моделирования реальных процессов и к выхода блоков fipeoOpaзования координат соответственно первого и второго имитаторов крана, а аыходы подключены соответственно к первому и второму входам блока сравнения координат, соединенного с блоком регистргщии столкновения.
0
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 474037, кл. G 09 В 9/04, 1975.
5
2. Авторское свидетельство СССР 691916, кл. G 09 В 9/Р4, 1979
; (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер оператора грузоподъемных устройств | 1981 |
|
SU960905A1 |
| Тренажер оператора грузоподъемных устройств | 1977 |
|
SU750550A1 |
| Устройство для обучения операторов грузоподъемных машин | 1982 |
|
SU1035635A1 |
| Имитатор визуальной обстановки тренажера крановщика | 1988 |
|
SU1569866A1 |
| Тренажер оператора грузоподъмной машины | 1979 |
|
SU862174A1 |
| Устройство для обучения крановщика навыкам по управлению краном | 1972 |
|
SU474037A1 |
| Тренажер операторов грузоподъемных устройство | 1977 |
|
SU691916A1 |
| Тренажер для обучения оператора грузоподъемной машины | 1974 |
|
SU521593A1 |
| Устройство для обучения операторовКРАНОВ | 1979 |
|
SU830506A1 |
| Тренажер буровика | 1982 |
|
SU1062760A1 |
