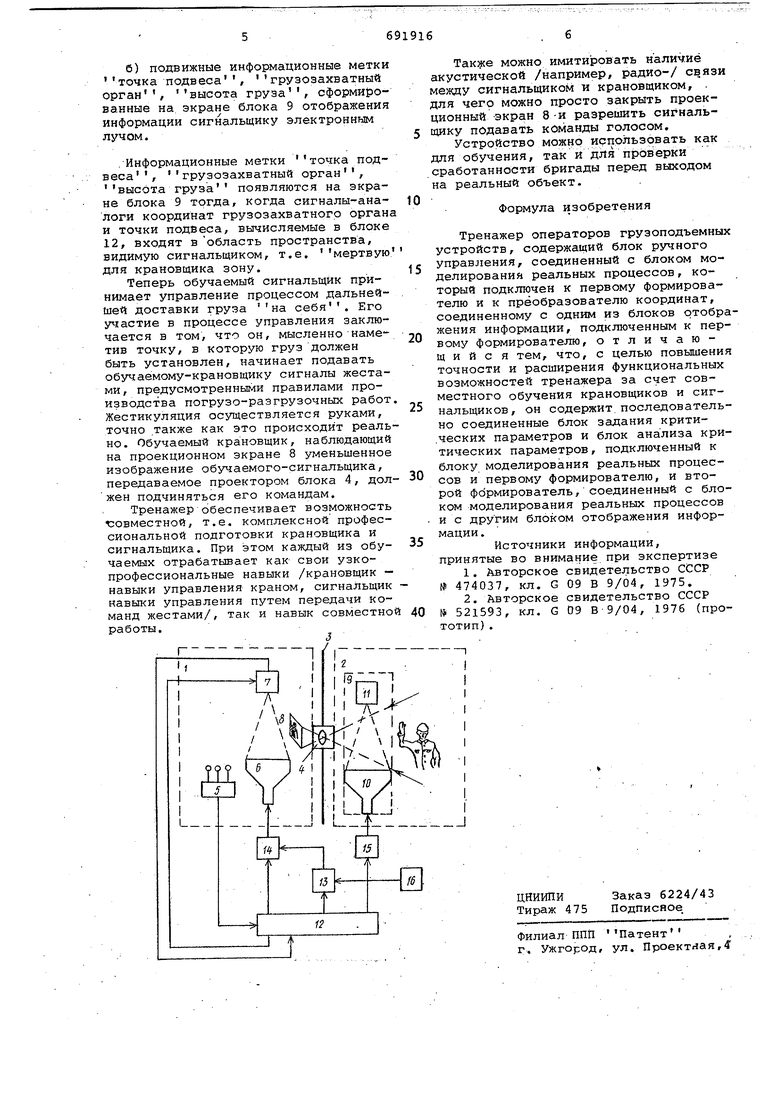
(54) ТРЕ1й ЖЕР ОПЕРАТОРОВ ГРУЗОПОДЪЕМНЫХ УСТРОЙСТВ ,1дий командоаппараты управления, бло отображения информации 6 (крановщику преобразователь координат 7 и проекционный экран 8. В кабине 2 сигнальщика установле блок отображения информации.9 (сигнальщику) , состоящий из экрана 10 и диапроектора 11, Выход блока 5 соединен со. входом .блока моделирования реальных процессов 12, вьгходнкоторого соединены со .входами преобразователя координат 7 блока анализа критических параметр)ов 13 и формирователей 14 и 15. Электрический выход преобразователя координат 7 соединен со входом блока 12 моделирования, а через его оптический выход на экран блока б отображения информации крановщику проектируется изображение производственного участка. Выход формирователя 14 (изображения в подвижной системе координат) соединен со входом блока б отображения информации крановщику. Вход блока 13 соединен с выходом блока задания критических пар;аметров 16, а его выход,- со входом формирователя 14 изображения в подвижной ситеме координат. Выход формирователя. 15 изображения в неподвихсной системе координат соединен со входами блока отображения информации 9 сигнальщику. Через оптический выход диапроекто ра 11 на экран 10 блока отображения информации 9 сигнальщику проектируется изображение части производствен ного участка, невиди.мой из кабины крана, т.е. так назншаемой мертвой зоны. Часть пространства кабины 2 сигнальщика проектируется блоком 4 на проекционный экран 8 в уменьшенном масштабе, Тренажёр операторов грузоподъемных устройств работает следующим образом. На экране блока б отображения информации крановщику включеннО.го тренажера с помощью преобразователя координат 7 и-формирователя 14 изображения в подвижной системе координат формируется световое изобра;жение, имитирующее визуальную обстановку, наблюдаемую реально из кабиньт крана Это видимое изображение включает в себя, во-первых, картину той части производственного участка, в которую по верйут Кран и, вО-вТорых, ряд подвижных информационных меток: точ грузозахватный орка подвеса ган , или грейфер, . высота груза , которые могут пер меда ься С1ТноЬительно картйньГпрбйз Бодственного участка и изменять сво Ъостояние в зависимости от действий управляющего тренажером человека. Таким образом, манипулируя ручками командоаппаратов блока 5 обучаемый передает команды управления в .блок 12 Моделирования, приводя тем самым в действие модель крана, что, в свою очередь, вызывает изменение наблюдаемой им обстановки на экране блока б отображения информации крановщику. До тех пор, пока грузозахватный орган не вошел в мертвую зону, координаты которой задаются с помощью блока 16, информация о полржении в пространстве и состоянии грузозахватного органа передаетя обучаемому крановщику в полном объеме и он может управлять процессом доставки груза самостоятельно без помощи обучаемого сигнальщика. В тот момент, когда грузозахватный орган войдет в мертвую ЗОН, что будет зафиксировано блоком 1 - путем сравнения текущих координат грузозахватного органа, вычисление которых непрерывно происходит в блока 12 моделирования, с координатами мертвой зоны, установленными в блоке 16, изображение грузозахватного органа станет невидимым для обучаемОлС - крановщика. Сигнал, вырабатываемый Споком 13, при сравнении сигналов, поступающих с блока 12 и блока 16, изменит схему соединений формирователя 14 изображения в подвижной системе -координат, за счет чего и обеспечивается стирание изображениягрузозахватного органа на экрано блока 6 отображения информации крановщику. С момента входа грузозахватного органа в мертвую зону управления кран.ом и состоянием грузозахватного органа , обучаемый-крановщик самостоятельно выполнять не может, так же это невозможно и в реальных производственных условиях, например, когда осуществляется погрузка в глубокий трюм судна. Теперь обучаемый-крановщик при управлении краном должен руководствоваться специальными сигналами, передаваемыми ему обучаемым-сигнальщиком, который находится в кабине 2 сигнальщика. На экране блока Ю отображения информации сигнальщику включенного тренажера с помощью диапроектора 11 и формирователя 15 изображения в неподвижной .системе координат формируются изображения, имитирующее визуальную обстановку, наблюдаемую реально сигнальщиком сУдобного места, например, с борта судна. Изображение, видимое обучаемым-сигнальщиком, включает в себя, . а) неподвижное световое изображеКйе чМстЖ п ройэводств.енного участка, спроектированное на экран блока 9 отображения, информации сигнальщику с.помощью диапроектора 11;
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для обучения оператора грузоподъемной машины | 1974 |
|
SU521593A1 |
| Тренажер операторов грузоподъемных устройств | 1981 |
|
SU964702A1 |
| Имитатор визуальной обстановки тренажера крановщика | 1988 |
|
SU1569866A1 |
| Устройство для обучения операторов грузоподъемных машин | 1982 |
|
SU1035635A1 |
| Устройство для обучения крановщика навыкам по управлению краном | 1972 |
|
SU474037A1 |
| Динамический тренежёр краноманипулятора мастерской технического обслуживания и ремонта | 2023 |
|
RU2809961C1 |
| Тренажер оператора грузоподъемных устройств | 1977 |
|
SU750550A1 |
| Тренажер водителя транспортного средства | 1981 |
|
SU980120A1 |
| Тренажер крановщика | 1983 |
|
SU1108484A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
