111 Изобретение относится к техническим сред|СТвам обучения, в частности к тренажерам для обучения машшшстов мостовых кранов. Известен тренажер, содержащий блок ручного управления, блок моделирования реальных процессов, счетчик операций, вычислитель величин ошибки и оценки, блок отображения, учебной информации, блок коммутаторов информационных сигналов, сумматор, преобразователь сигналов, вычислитель показателей ка чества технологического процесса, пороговый блок, блок контроля конца и начала выполне ния задания, счетчик времени, счетчик циклов, блок сравнения, блок вычисления средней с оценки и блок выбора масштаба времени 1 Указанное устройство обладает ограниченными дидактическими возможностями, так как свои управляющие воздействия обучающийся может оценить только по совершенным им k ошибкам или по конечным результатам выполненного упражнения. Наиболее близким к изобретению является тренажер, содержащий соединентый с датчиком перемещения механизм передачи информации о реальных условиях, кинематически связанны с блоком имитации поступательного движения крана и расположенный в кадрирзтощей рамке между источником света и блоком отображения информации, соединенным посредством бл ка коммутаторов с блоком сумматора, соединенным с блоком моделирования движения по оси X, блоком вычисления ординаты отклонения груза и блоком формирования отличительных сигналов, соединенным посредством блока моделирования подъема с блоком командоаппаратов, соединенным с блоком моделирования движения по оси X и блоком моделирования движения по оси У, соединенным с блоком имитации поступательного движения крана, а также непосредственно и через блок вычисления ординаты груза с датчиком переме1цения 2. Недостатком данного устройства являются его ограниченные дидактические возможности, так как обучающийся не может корректироват свои управляющие воздействия из-за отсутстви текущей информации о их правильности, что ведет к нарушению одного из основных принципов дидактики - принципа сознательности и активности. Пусть, например, обучающийся с помощью указанного устройства отрабатывает навыки по управлению мостом крана, находящимся вблизи правой стены цеха - преграды моста Обучающийся, воздействуя на командоаппарат моста, перемещает мост в направлении преграды. В момент перевода командоаппарата моста в нулевое положение с электродвигателя, приводящего в движение мост, снимается напряжение и на механизм передвижения моста )накладьтается тормоз. После зтого мост продолжает с замедлением перемещаться в сторону преграды. Если в момент перевода командоаппарата моста в нулевое положение скорость передвижения моста была достаточно велика, то тормозной путь моста может оказаться большим, чем расстояние от моста до преграды, которое было в зтот момент времени, что приведет к столкновению моста крана с преградой. Таким образом, неправильное управление передвижением моста крана позднее выключение электродвигателя, выявляется только по факту столкновения моста с преградой. В момент же управления передвижением моста обучающийся не может определить тормозной путь моста и сравнить его с расстоянием от моста до преграды, а стало быть не может определить максимально допустимую скорость движения моста в направлении преграды. Для избежания столкновения моста с препятствием обучающийся управляет передвижением неуверенно, скованно, что не способствует успешному формированию у него навыков управления. Цель изобретения - расширение дидакти-. ческих возможностей устройства. Поставленная цель достигается тем, что в тренажер, содержащий последовательно включенные блок командоаппаратов, блок моделирования реальных процессов, блок формирования отличительных сигналов, блок сумматоров, блок предъявления учебной информации и блок имитации поступательного движения крана, второй вход которого соединен со вторым выходом блока моделирования реальных процессов, а выход - со вторым входом блока предъявления учебной информации, второй выход которого подключен ко второму входу блока моделирования реальных процессов, третий, четвертый и пятый выходы которого соединены соответственно со вторым, третьим и четвертым входами блока сумматора, введены последовательно включенные блок задания тормозных усилий, блок вычисления зон торможения и блок сравнения, выход которого соединен с третьим входом блока предъявления учебной информации, последовательно включенные блок задания координат преграды и блок вычисления расстояния до преграды, вькоды которого соединены с другими входами блока сравнения, и блок задания координат зоны торможения, выход которого подключен ко второму входу блока вычисления зон торможения, третий и четвертый входы которого соединены соответственно со вторым и шестым выходами блока моделирования реальных процессов, второй и третий входы блока вычисления расстояния до преграды подключены соответственно ко второму выходу блока предъявления учебной информа- ции н к третьему выходу блока моделирования реальных процессов. На чертеже представлена структура тренажера. Тренажер содержит соединенный с датчиком 1 перемещения механизм 2 передачи информацин о реальных условиях, кинематически связанный с блоком 3 имитадии поступательп ного движения крана и расположенный в кадрирующей рамке 4 между источником 5 света и узлом 6 отображения информации, соединенным посредством узла 7 коммутаторов с блоком 8 сумматоров, соединенным с узлом 9 моделирования движения по оси X, узлом 10 вычисления ординаты отклонения груза и блоком 11 формирования отличительных сигналов, соединенным посредством узла 12 моделирования подъема с блоком 13 командоаппаратов, соединенным с узлом 9 моделирования движения по оси X и узлом 14 модели рования движення по оси У, соединенным с блоком 3 имитации поступательного движения крана, а также непосредственно и через узел 10 вычисления ординаты отклонения груза с датчиком 1 перемещения. Одни входы блока 15 вычисления зон торможения соединены с соответствующими выходами узла 9 моделирования движения по оси X и узла 14 моделирования движения по оси У, другие входы - с соответствующими выходами блока 16 задания тормозных усилий, третьи входы - с соответствующими выходами блока 17, задания координат зоны торможения, а выходы - с соответствующими одними входами блока 18 сравнения, выход которого соединен с узлом 19 подсказа, а другие входы - с блоком 20 вычисления расстояння до преградь;, одни входы которого соединены с соответствующими выходами узла 9 моделирования движения по оси X и даЛиком 1 перемещения, а другие входы - с соо ветствующими выходами блока 21 задания координат преграды. Блок 15 вычисления зон торможения состоит из вычислителя 22 зоны торможения моста и вычислителя 23 зоны торможения тележки. Блок 18 сравнения состоит из узла 24 сравнения расстояния от тележки до преграды с зоной торможения тележки и узла 25 сравнения расстояния от моста до преграды с зоной торможения моста. Блок 20 вычисления расстояния до прегращз состоит из вычислителя 26 расстояния от моста до преграды и вычислителя 27 расстояния от тележки до преграды. На чертеже приняты следующие обозначения сигналов: 11 4 X, абсцисса тележки; ордината моста; скорость передвижения тележки; к скорость передвижения моста; Х„ абсцисса преграды; ордината преграды; расстояние от тележки до преграды; расстояние от моста до преграды; зона торможения тележки; зона торможения моста; величина изменения зоны торможения тележки; величина изменения зоны торможения величина тормозного усилия механизма i - величина тормозного усилия механизма моста. Датчик 1, механизм 2, рамка 4, источник 5, узлы 6, 7 и 19 входят в состав блока 28 предъявления учебной информации, а узлы 9, 10, 12 и 14 - в состав блока 29 моделирования реальных процессов. Вьиислители 22 и 23 могут быть реализованы с помощью моделирующих вьршслительных устройств 3, а вычислители 26 и 27 с помощью суммирующих операционных усилителей постоянного тока 4. Блок 16 задания тормозных усилий предназначен для изменения в процессе обучения тормозных усилий механизмов подъема, тележки и моста. Блок 17 задания координат зоны торможения предназначен для изменения в процессе обучения зон торможения механизмов подъема, тележки и моста. Блоки 16 и 17 могут быть реализованы с помощью линейных потенциометров. Узел 19 подсказа предназначен для выдачи обучающемуся рекомендаций по управлению краном и может быть реализован с помощью устройства, подающего зрительные и звуковые сигналы, например сирены. Тренажер краНовщика работает следующим образом. При включении питания на зкране узла 6 видны яркая злектронная световая точка, исходящая из нее световая наклонная прямая линия, световая окружность. Порядок получения изображения плана цеха на зкране узла 6 и полная имитация динамических процессов, возникающих при перемещении груза, осуществляется также как и в прототипе. Величина пути торможения механизмов передвижения моста и тележки может быть найдена по известным закономерностям, причем минимальное значение пути торможения регламентируется типом крана и видом перемешаемого груза, а максимальное значение пути торможения должно быть меньше или в крайнем случае равно расстоянию от механизма передвижения до преграды. Если значение пути торможения равно расстоянию от механизма передвижения до преграды, то механизм передвижения дойдет до преграды, что является грубым нарушением правил эксплуатации крана. Следовательно, начало торможения механизма передвижения должно быть выбрано так, чтобы значение расстояния от механизма передвижения до пре грэды было больше значения пути торможениямеханизма передвижения. При зтом зона торможения для исключения наезда механизма передвижения на преграду выбирается больше расстояния от механизма передвижения до преграды на величину X „ для тележки и на величину Ур для моста. Зону торможения в процессе приобретения обучаюшимися навыков управления необходим уменьшать, так как уменьшение зоны тормож ния требует от обучаюшегося более быстрого выполнения управляюших воздействий для торможения механизма передвижения, что возможно лишь после того, когда обучающийся приобрел первоначальные навыки управления. Пусть обучающийся с помощью предлагаемо го тренажера отрабатывает навыки по управле нию мостом крана, находящимся вблизи одной из стен цеха - преграды моста, имеюшей одринату Ур . Значение зтой ординаты прегр ды подается с выхода блока 21 на вход вычислителя 26. Обучающийся, воздействуя на командоаппарат моста, входящий в состав блока 13, перемещает мост в направлении преграды. Положение моста относительно злементов цеха в каждый момент времени характеризуется ординатой моста У. Это значение ординаты моста с выхода датчика 1 подается на вход вычислителя 26, который по постушшшим на его входы значениям ординаты преграды УП и ординаты моста У вычисляет расстояние от моста До преграды У. Одновременно с этим значение скорости передвижения моста У с выхода узла 14 поступает на вход вычислителя 22, на другой ,вход которого с выхода блока 16 поступает значение тормозного усилия механизма моста F, а на третий вход с выхода блока 17 поступает величина изменения зоны торможеиия моста Ур. Вычислитель 22 по поступившим на его входы значениям: скорости передвижения моста , тормозного усилия механизма моста F, и величины изменения зоны торможения моста Ур, вычисляет зону торможения моста yj. Узел 25 сравнивает поступившие на его один вход значение зоны торможения моста y.j с поступившим на его цругок вход значением расстояния от моста до преграды У и при превышении значения зоны торможения моста УЗ значения расстояния от моста до преграды У вырабатьшает на своем выходе |Сигнал, поступакяцйй. на вход блока 19 подj сказа, который указывает облучающемуся на необходимость выполнения управляюшнх воздействий для торможения моста. Это указание сигнализирует обучающемуся о его неправильных в данный момент времени управляющих воздействиях и подсказывает пути их исправления, что является одним из основных методических требований, предъявляемых к тренажеру. Аналогична последовательность работы устойства при отработке обучающимся навыков по управлению тележкой крана,, только в зтом лучае вместо вычислителя 26, вычислителя 22 узла 25 задействованы соответственно выислители 27, 23 и узел 24. Кроме того, устройство позволяет обучаюему отрабатывать иавыки coBMe(j;raoro управения мостом и тележкой. В этом случае бу-, ут задействованы все блоки устройства. Использование предлагаемого тренажера по i равнению с известным позволит получить кономический эффект за счет ускорения роцесса обучения и снижения затрат на обучеие рабочих.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обучения операторов грузоподъемных машин | 1982 |
|
SU1035635A1 |
| Тренажер водителя погрузчика | 1984 |
|
SU1163344A1 |
| Тренажер оператора грузоподъемных машин | 1982 |
|
SU1081645A1 |
| Устройство для обучения крановщика | 1980 |
|
SU911590A1 |
| Тренажер операторов систем управления | 1981 |
|
SU953650A1 |
| Имитатор движущихся объектов | 1987 |
|
SU1413659A1 |
| Имитатор визуальной обстановки тренажера крановщика | 1988 |
|
SU1569866A1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| Тренажер буровика | 1982 |
|
SU1062760A1 |
| Устройство для обучения крановщика навыкам по управлению краном | 1976 |
|
SU599279A1 |
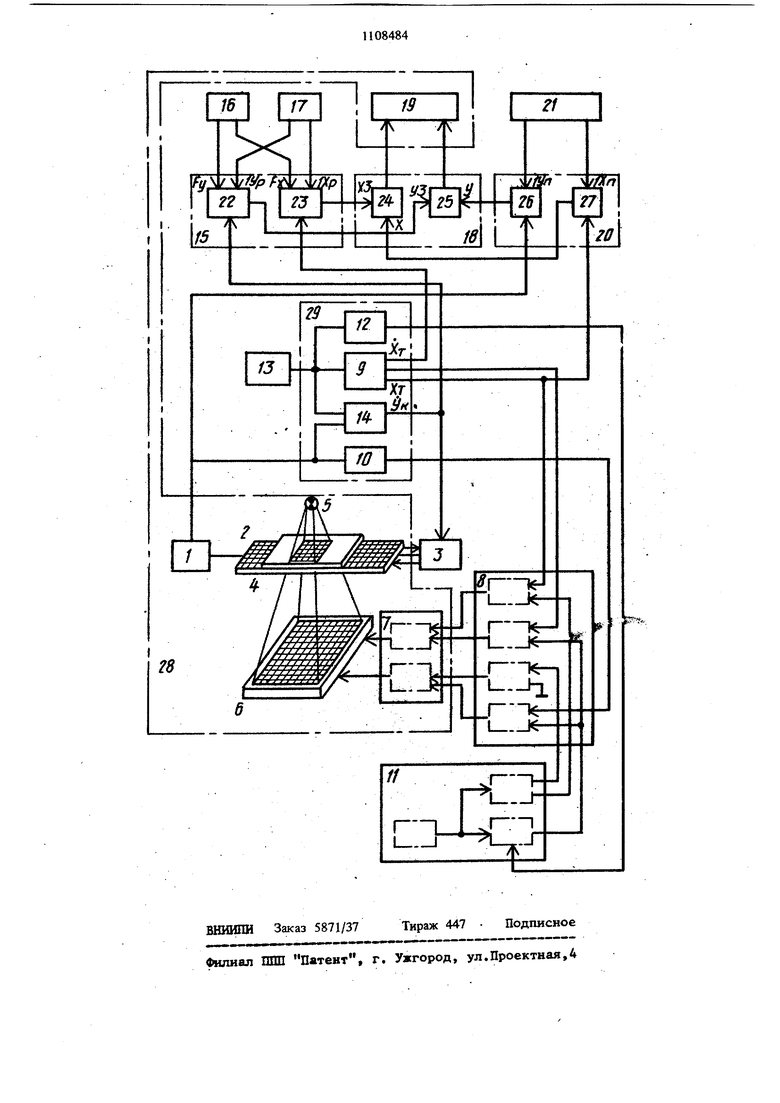
ТРЕНАЖЕР КРАНОВИЩКА, содержащий последовательно включенные блок комаядоаппаратов, блок моделирования реальных процессов, блок формирования отличительных сигналов, блок сумматоров, блок предъявления учебной информации и блок имитации поступательного дэижения крана, второй вход которого соединен со вторым выходом блока моделирования реалы1ых процессов, а выход со вторым входом блока предъявления учебной информации, второй выход которого подклю- . чей ко второму входу блока моделирования реальных процессов, третий, четвертый и пятый выходы которого соединены соответственно со вторым, третьим и четвертым входами / блока сумматоров, отличаюшийся тем, что, с целью расширения дидактических возможностей тренажера, в него введены последовательно включенные блок задания тормозных усилий, блок вычисления зон торможения и блок сравнения, выход которого соединен с третьим входом блока предъявления учебной информации, последовательно включенные блок задания координат преграды и блок вычисления расстояния до преградь, выходы которюго соединены с другнми входами блока сравнения, и блок задания координат зоны 9 торможения, выход которого подключен ко второму входу блока вычисления зон торможения, третий и четвертый входа которого соединены соответственно со вторым и шестьш выходами блока моделирования реальных процессов, второй и третий входы блока вычисления расстояния до преграды подключены соответственно ко второму выходу блока предъявления учебной информации и к третьему выходу блока моделирования реальных 00 процессов. 4 00 4;;