Изобретение относится к подъемно транспортному машиностроению, в част ности к аварийным стопорам, и предназначено для сейсмической защиты и аварийного удержания строительных объектов, имеющих тепловое переметение. Известен аварийный стопор, содержащий винтовую пару из элементов, имеющих возможность поступательного и вращательного движений, первый из которых соединен с удерживаемым объектом, а второй заключен в корпус, установлен с зазором относительно его стенок и снабжен устройством регулирования этого зазора ij. Недостатком известного аварийного стопора является относительно малая грузоподъемность вследствие того, что усилие от удерживаемого объекта передается на опору через несамотормозящую резьбу и шариковую муфту. Цель изобретения - повышение грузоподъемности аварийного- стопора, Цель достигается тем, что аварийный стопор, содержащий винтовую пару из элементов, имеющих возможность по ступательного и вращательного движений, первый иа которых соединен с удерживаемым объектом,а второй заключен в корпус, установлен с зазо;ром относительно его стенок и снабжен устройством регулирования этого зазора, снабжен шкивом, установленным на Торцевой поверх«ости элемента имеющего, возможность вращательного движения, и йвумя тяговыми элементами, первый из которых соединен с эле ментом, имеющим возможность поступательного движения-и оснащен полиспастом, сбегающий трос которого огибает вышеуказанный шкив и крепится к второму тяговому элементу. Кроме того, второй тяговый элемен соединен с корпусом. На фиг,1 показан аварийный стопор разрез) на фиг.2 - компоновка двух аварийных стопоров на трубопроводе высокого давления атомной электро танции. Аварийный стопор содержит корпус 1, в котором расположены элементы, имеющие возможность поступательного движения, например винт 2, и элемент вращательного движения, например гай ка 3, .полиспаст 4 и два тяговых элемента 5 и 6. На корпусе 1 укреплены также втул ка 7, два направляющих ролика 8 и серьга 9, с помощью которой устройство соединяется с опорой 10 (фиг.2) Винт 2 установлен во втулке 11 с возможностью перемещения посредством серьги 12 фланца 13 и кольца 14 совместно с удерживаем объектом 15 Гфиг,2/, Винт 2 и гайка 3 имеют одинаковую резьбу, которая может быть самотормозящейся или несамотормозящейся. На нижней торцевой поверхности гайки 2 имеется шкив 16. Сбегающий трос 17 полиспаста 4 закреплен на шкиве 16 и тяговом элементе 5, представляющим собой груз, .вместо груза может быть применена пружина. Между торцевой поверхностью гайки 3 и корпусом 1 имеется зазор 18. Неподвижный блок 19 полиспаста 4 прикреплен к корпусу 1, а подвижный блок 20 - к тя-говому элементу 6, выполненному в виде пружины, заключенной в корпус 21 и через шток 25 ; и кронштейн 23 соединен с винтом 2. Серьги 9 и 12 имеют сферические втулки, позволяющие аварийному стопору отслеживать тепловые перемещения удерживаемого объекта во всех направлениях. Аварийный стопор работает следующим образом, , В безаварийном режиме удерживаемый объект 15 при тепловом расширении перемещается,а вместе с ним перемещае.тся винт 2. При движении объекта 15 от аварийного стопора шток 22 движется вместе с серьгой 12 и винтом 2, а тяговый элемент 6 разводит блоки 19 и 20 полиспаста 4, Трос 17 втягивается в полиспаст 4 и поворачивает гайку .3. Передаточное отношение полиспаста подбирается таким, что поступательное движение гайки 3 соответствует осевому перемещению винта 2. Поскольку поступательное перемещение гайки 3 в точности соответствует осевому перемещению винта 2, зазор 18 при безаварийной работе остается неизменным. При движении объекта 15 на аварийный стопор все эти движения совершаются в обратном направлении. Зазор 18 необхОрЦИМ для того, чтобы исключить трение гайки 3 по торцу, а величина его определяется точностью изготовления ава рийного стопора. Величины усилий тяговых элементов 5 и 6 выбираются такими, чтобьг эти усилия были достаточными для преодоления сил трения в резьбе пары винт-гайка и механизме полиспаста 4, причем усилие, развивае14ое тяговым элементом 6, должно быть больше усилия тягового элемента 5, так как при движении удерживаемого объекта 15 от аварийного стопора тяговый элемент 6, должен преодолевать усилие тягового элемента 5. При этих условиях каждый из тяговых элементов 5 и 6 может обеспечить ускорение гайке 3 в направлении ее оси около тысячной Доли земного ускорения V При работе аварийного стопора в аварийном режиме, когда ускорение удерживаемого объекта достигает- нескольких CV , гайка 3 не успевает
вращатьсясхэгласованно с винтом 2, а перемещается вместе с ним как единое целое. При этом зазор 18 выбирается, а в резьбе гайки 3 и по торцу ее возникают силы трения,которые останавливают Движение удерживаемого объекта 15, препятствуя развитию кинетической энергии. Усилие от объекта 15 через серьгу 12, винт 2, гайку 3, корпус 1 и серьгу 9 передается на опору 10.
При сейсмических или автоколебаниях стопоримого объекта, если амплитуда превышает зазор 18, а ускорение превышает; ускорение, которое могут обеспечить тягоаые элементы 5 и 6 гайке 3 в осевом направлении, аварийный стопор срабатывает как в аварийном режиме. По, окончании.аварийного режима- работоспособность аварийного стопора сохраняетсяi
В качестве базового объекта для
сравнения принят гидравлический аварийный стопор типа H5I японской фиргл Tt)e.4«a1coV6eK4co ,171) г состоящий из цилиндра с рабочей жидкостью и поршня, делящего рабочий объем цилиндра
ifa две части, которые сообщаются между собой через клапан.
Упомянутый авсцрийный стопор обладает всеми недостатками гидравлических устройств и дополнительным,связанными с использованием их в условиях повышенной ралшации. Это рада«олиз рабочей жидкости и полимеризации, которые приводят к появлению в ней твердых включений и газовой фазы. Твердые и газовые включения в рабоче жидкости делают работу клапана ненадежной , а это может привести к аварии.
Использование в аварийном стопоре тяговых элементов и винтовой пары, управляемой удерживаемом объектом при отсутствии рабочей жидкости позволяет предложенному устройству надежно работать в течение длительного времени .без обслуживания в условиях повышенной радиации, что позволит значительно уменьшить дозу облучения персонала, обслуживакхцего аварийные стопоры, установленные на обсрудовании АЭС.
,О
И
Фг/л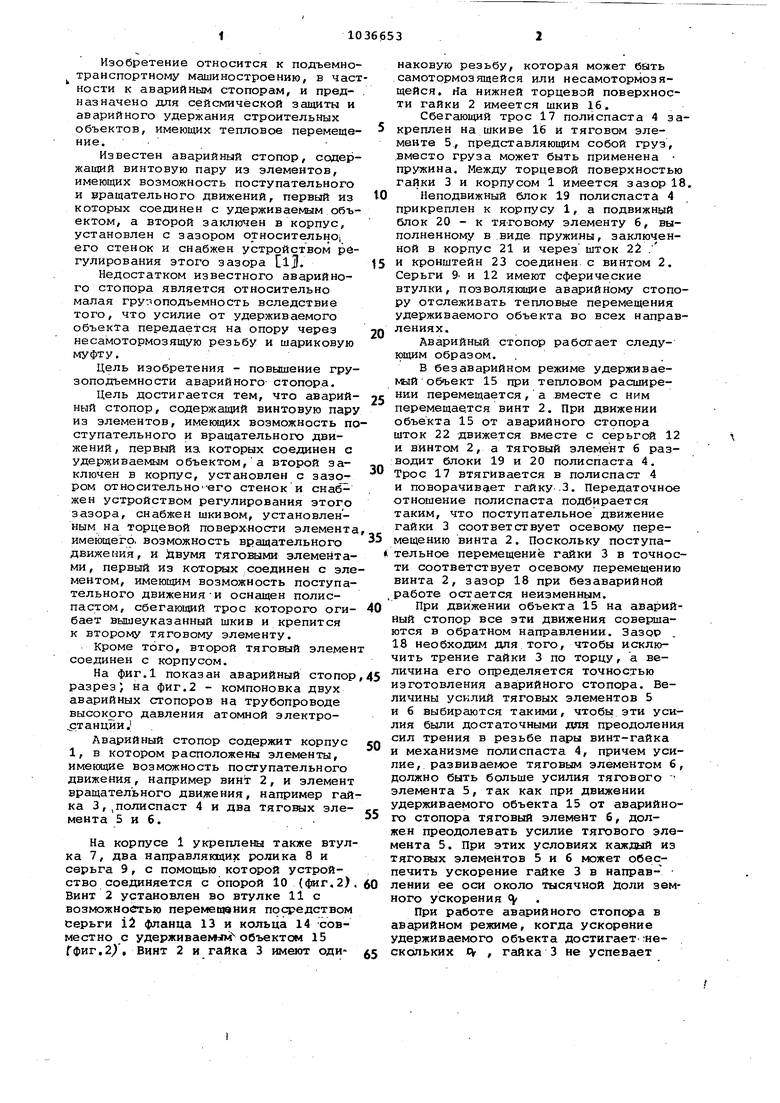

| название | год | авторы | номер документа |
|---|---|---|---|
| Аварийный стопор | 1984 |
|
SU1181972A1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ АСФАЛЬТОСМОЛИСТЫХ ОТЛОЖЕНИЙ С ВНУТРЕННЕЙ ПОВЕРХНОСТИ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 1996 |
|
RU2107153C1 |
| Аварийный стопор для удержания трубопровода | 1985 |
|
SU1280259A1 |
| УСТРОЙСТВО И СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1992 |
|
RU2111394C1 |
| Амортизатор | 1984 |
|
SU1328615A1 |
| Механизм автоматической регулировки привода управления фрикционного устройства | 1989 |
|
SU1707341A1 |
| Самотормозящееся нагружающее устройство | 1984 |
|
SU1234740A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1994 |
|
RU2083895C1 |
| СПОСОБ ЭВАКУАЦИИ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2386546C2 |
| ТРАНСМИССИЯ С БЕССТУПЕНЧАТЫМ ИЗМЕНЕНИЕМ СКОРОСТИ | 2008 |
|
RU2480647C2 |

1. АВАРИЙНЫЙ СТОПОР, содержащий винтовую пару из элементов, имеющих возможность поступательного и вращательного движений, первый из которых соединен с удерживаемым объектом, а второй заключен в корпус, установлен с зазором относительно его стенок и снабжен устройством регулирования этого зазора, отличающийся тем, что, с целью повышения грузоподъемности аварийного стопора, последний снабжен шкивом, установленным на торцевой поверхности элемента, имеющего возможность вращательного движения, и двумя тяговыми элементами, первый из которых соединен с элементьм, имеющим возможность поступательного движения, и оснащен полиспастом, сбегающий трос которого огибает вышеуказанный шкив и прикреплен к второму тягoвo 1y элементу. 2. Стопор по П.1, отличающ и и с я тем, что второй тяговый (Л элемент соединен с корпусом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект йирмы Санава Тэкки, 1979, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
