Изобретение относится к ракетной технике и может быть использовано для полунатурного моделирования, проведения испытаний и проверки работоспособности и управляемости головок самонаведения (ГСН) воздушных и космических летательных аппаратов (ЛА), а также отладки программно-алгоритмического обеспечения бортовых цифровых вычислительных машин (БЦВМ), входящих в состав ГСН.
Известен моделирующий комплекс системы самонаведения ракеты, содержащий связанные электрически между собой динамический стенд с установленной на нем ГСН или станцией самонаведения, узел цели в виде подвижного устройства с излучателем радиоволн, аналого-цифровой вычислительный комплекс, пульт управления. Узел цели воспроизводит перемещение цели в пространстве и излучение, приходящее от нее на ГСН. Моделирующий комплекс позволяет исследовать динамическую точность системы самонаведения как при наличии, так и отсутствии обтекателя ГСН или РЛС и выявить вносимые обтекателем погрешности (Петров Г.М., Луканин Н.Б., Бартольд Э.Е. Методы моделирования систем управления на аналоговых и аналого-цифровых вычислительных машинах. М., «Машиностроение», 1975, стр.189-194, рис.4.9). Недостатком данного моделирующего комплекса является узкая по сравнению с моделируемой системой полоса пропускания, что приводит к потере его устойчивости раньше, чем наступит кинематическая неустойчивость моделируемой системы при малых дальностях до цели. Кроме того, комплекс отличается большими громоздкостью и энергоемкостью, сложностью наладки и эксплуатации.
Известен испытательный стенд, содержащий головку наведения, динамический стенд воспроизведения углового движения головки наведения, радиоимитатор цели, включающий излучатель сигналов, последовательно соединенные блок управления полунатурного моделирования функционирования головки наведения, вход которого подключен к выходу динамического стенда воспроизведения углового движения головки наведения, две платформы с колесами, блок приема сигналов управления платформой и определения ее местоположения, электропривод платформы, при этом колеса платформ с приводом выполнены из магнитного материала, полусфера из магнитопроницаемого материала, а платформы расположены по обе стороны полусферы с зеркальной симметрией относительно друг друга и прижаты магнитным притяжением друг к другу. Головка наведения, включающая реальную аппаратуру бортового комплекса управления и автопилот, установлена на динамическом стенде воспроизведения углового движения головки наведения. Источник сигнала установлен на платформе, передвигающейся по внутренней поверхности полусферы, имитируя передвижение цели. Головка наведения принимает излученный сигнал и с помощью динамического стенда происходит отслеживание головкой наведения перемещения излучателя сигналов (RU 2263869, F41G 3/26, G09В 9/08. 2005).
Причина, препятствующая достижению указанного ниже технического результата при использовании известного испытательного стенда, заключается в следующем. Вследствие инерционности динамического стенда и электропривода платформы с излучателем сигналов полоса пропускания системы управления испытательного стенда узка по сравнению с моделируемой системой самонаведения ЛА. Поэтому на малых дальностях между ЛА и целью, когда резко возрастает угловая скорость линии визирования «ЛА-цель», устойчивость системы управления стенда нарушается раньше, чем кинематическая неустойчивость системы самонаведения ЛА. Система управления перемещением платформы с источником сигналов в процессе эксперимента задействована в замкнутом контуре системы самонаведения ЛА, что искажает динамику всего контура наведения ЛА и вносит ошибки в оценки собственно динамических параметров контура самонаведения ЛА.
Сущность изобретения заключается в следующем. Его задачей является разработка и создание простого в использовании и обслуживании стенда, позволяющего обеспечить исследования и испытания в процессе полунатурного моделирования характеристик системы самонаведения ЛА, в том числе ее предельных значений. Технический результат при осуществлении изобретения выражается в повышении точности результатов полунатурного моделирования систем самонаведения ЛА, расширении функциональных возможностей стенда за счет обеспечения возможности отладки программно-алгоритмического обеспечения (ПАО) БЦВМ, входящих в состав ГСН.
Указанный технический результат достигается тем, что в известный испытательный стенд, содержащий головку наведения, излучатель сигналов, согласно изобретению введено вычислительно-моделирующее устройство, при этом головка наведения зафиксирована на неподвижном основании и выполнена в виде ГСН, содержащей БЦВМ, антенну, установленную на гиростабилизированной платформе; излучатель сигналов зафиксирован на неподвижном основании и выполнен в виде генератора электромагнитных волн, выход которого соединен с входом рупорной антенны, продольная ось которой совмещена с продольной осью ГСН; вычислительно-моделирующее устройство содержит блок моделей динамики и движения ЛА, блок модели движения цели, блок модели движения гиростабилизированной платформы ГСН, блок модели управления гиростабилизированной платформой ГСН, блок модели расчета единичного вектора «ЛА-цель», причем первый и второй выходы блока моделей динамики и движения ЛА соединены соответственно с первым и вторым входами блока модели расчета единичного вектора «ЛА-цель», третий вход которого соединен с выходом блока модели движения цели, первый выход - с входом блока модели управления гиростабилизированной платформой ГСН, а второй выход - со вторым входом БЦВМ ГСН, первый вход которой соединен с выходом блока модели движения гиростабилизированной платформы ГСН, вход которого соединен с выходом блока модели управления гиростабилизированной платформой ГСН.
Совмещение продольных осей установленных неподвижно излучателя сигналов (рупорной антенны) и ГСН, введение вычислительно-моделирующего устройства (ВМУ) позволяет модифицировать информацию, вводимую в БЦВМ ГСН за счет включения дополнительных моделей, имитирующих условия работы системы самонаведения ЛА, таких как, например, модель шумов радиолокационного сигнала ГСН, модель обтекателя ГСН и др., а также имитировать эффект Доплера за счет перестройки источника сигналов по информации от ВМУ о взаимном движении ЛА и цели. Стенд обеспечивает возможность приближения математических моделей к условиям функционирования и характеристикам реальных систем за счет усложнения и наращивания состава математических моделей, увеличивает достоверность отладки ПАО БЦВМ, что повышает точность результатов полунатурного моделирования системы самонаведения ЛА.
Изобретение поясняется чертежом, на котором представлена структурная схема стенда для полунатурного моделирования системы самонаведения ЛА.
Стенд для полунатурного моделирования системы самонаведения ЛА содержит зафиксированные на неподвижном основании излучатель сигналов (имитатор цели) 1, моделируемую систему самонаведения ЛА в виде ГСН 2, ВМУ 3. Излучатель сигналов 1 содержит генератор электромагнитных волн 4, выход которого соединен с входом, например, рупорной антенны 5. ГСН 2 установлена на гиростабилизированной платформе (на схеме не показана) и содержит БЦВМ 6, к которой через согласующие элементы (на схеме не показаны) подключена приемная антенна 7. Продольная (оптическая) ось рупорной антенны 5 совмещена с продольной (оптической) осью ГСН 2 и, соответственно, со строительной осью «X» ЛА (реальной либо виртуальной). ВМУ 3 содержит блок 8 моделей динамики и движения ЛА, блок 9 модели движения цели, блок 10 модели движения гиростабилизированной платформы ГСН, блок 11 модели управления гиростабилизированной платформой ГСН, блок 12 модели расчета единичного вектора «ЛА-цель». Первый и второй выходы блока 8 моделей динамики и движения ЛА соединены соответственно с первым и вторым входами блока 12 модели расчета единичного вектора «ЛА-цель», третий вход которого соединен с выходом блока 9 модели движения цели. Первый выход блока 12 соединен с входом блока 11 модели управления гиростабилизированной платформой ГСН, а второй выход - со вторым входом БЦВМ 6 ГСН 2. Первый вход БЦВМ 6 соединен с выходом блока 10 модели движения гиростабилизированной платформы ГСН, вход которого соединен с выходом блока 11 модели управления гиростабилизированной платформой ГСН.
В качестве ВМУ 3 может быть использован персональный компьютер или другая электронно-вычислительная машина, процессор которой совместно с оперативной памятью и другими структурными элементами способен решать уравнения, соответствующие алгоритмам, реализуемым по известным правилам (Петров Г.М., Луканин Н.Б., Бартольд Э.Е. Методы моделирования систем управления на аналоговых и аналого-цифровых вычислительных машинах. М., «Машиностроение», 1975, стр.82-102; 127-194.) блоками 8-12.
Стенд работает следующим образом. Перед началом сеанса полунатурного моделирования совмещают продольные (оптические) оси ГСН 2 и рупорной антенны 5 излучателя сигналов 1, вводят в автопилот ЛА, БЦВМ 6 ГСН 2 и ВМУ 3 данные, характеризующие движение цели и движение ЛА по траектории. От начала и до окончания сеанса сигналы, излучаемые рупорной антенной 5 излучателя сигналов 1 (имитатора цели), направляются в сторону ГСН 2. Блок 8 моделей динамики и движения ЛА формирует сигналы  пропорциональные координатам движения ЛА в базовой (стартовой) системе координат (БСК), и сигналы матрицы
пропорциональные координатам движения ЛА в базовой (стартовой) системе координат (БСК), и сигналы матрицы  характеризующие ориентацию ЛА (связанной системы координат (ССК) относительно БСК) в зависимости от отклонения рулей
характеризующие ориентацию ЛА (связанной системы координат (ССК) относительно БСК) в зависимости от отклонения рулей  формируемыми автопилотом ЛА. В блоке решаются в общем виде следующие уравнения определяемыми функционалами F1-F5:
формируемыми автопилотом ЛА. В блоке решаются в общем виде следующие уравнения определяемыми функционалами F1-F5:
 - уравнения моментов, действующих на ЛА;
- уравнения моментов, действующих на ЛА;
 - уравнения сил, действующих на ЛА;
- уравнения сил, действующих на ЛА;
 - уравнения ориентации ЛА в пространстве;
- уравнения ориентации ЛА в пространстве;
 - уравнения навигации ЛА;
- уравнения навигации ЛА;
 - уравнения навигации ЛА.
- уравнения навигации ЛА.
Блок 9 модели движения цели формирует сигналы  пропорциональные координатам движения цели в этой же системе координат. Блок решает в общем виде уравнения, определяемые функционалом F6:
пропорциональные координатам движения цели в этой же системе координат. Блок решает в общем виде уравнения, определяемые функционалом F6:
С выходов блока 8 сигналы  пропорциональные координатам движения ЛА и матрицы
пропорциональные координатам движения ЛА и матрицы  характеризующие ориентацию ЛА, подаются соответственно на первый и второй входы блока 12 модели расчета единичного вектора «ЛА-цель», на третий вход которого поступают сигналы
характеризующие ориентацию ЛА, подаются соответственно на первый и второй входы блока 12 модели расчета единичного вектора «ЛА-цель», на третий вход которого поступают сигналы  пропорциональные координатам движения цели. По сигналам
пропорциональные координатам движения цели. По сигналам  и
и  здесь формируется сигнал единичного вектора направления «ЛА-цель»
здесь формируется сигнал единичного вектора направления «ЛА-цель»  а также, с учетом сигнала матрицы
а также, с учетом сигнала матрицы  вырабатываются сигналы, пропорциональные углу проекции линии визирования «ЛА-цель» на ССК ЛА в горизонтальной плоскости (по курсу) ϕК и углу проекции линии визирования «ЛА - цель» на ССК ЛА в вертикальной плоскости (по тангажу) ϕT. Блок 12 решает в общем виде уравнения:
вырабатываются сигналы, пропорциональные углу проекции линии визирования «ЛА-цель» на ССК ЛА в горизонтальной плоскости (по курсу) ϕК и углу проекции линии визирования «ЛА - цель» на ССК ЛА в вертикальной плоскости (по тангажу) ϕT. Блок 12 решает в общем виде уравнения:

где 
где 
С первого выхода блока 12 сигналы единичного вектора направления «ЛА-цель»  подаются на вход блока 11 модели управления гиростабилизированной платформой ГСН, по которым формируются команды управления движением гиростабилизированной платформы с антенной 7 по курсу
подаются на вход блока 11 модели управления гиростабилизированной платформой ГСН, по которым формируются команды управления движением гиростабилизированной платформы с антенной 7 по курсу  и по тангажу
и по тангажу  в соответствии с уравнениями (в общем виде):
в соответствии с уравнениями (в общем виде):
где: dK(T) - коэффициенты усиления контура управления гиростабилизированной платформы ГСН.
Эти сигналы передаются в блок 10 модели движения гиростабилизированной платформы ГСН, где по полученным данным формируются и передаются на первый вход БЦВМ 6 ГСН 2 сигналы, пропорциональные углу проекции антенной системы координат (АСК) гиростабилизированной платформы, находящейся в режиме автосопровождения цели, на ССК ЛА в горизонтальной плоскости (по курсу)  и углу проекции АСК гиростабилизированной платформы, находящейся в режиме автосопровождения цели, на ССК ЛА в вертикальной плоскости (по тангажу)
и углу проекции АСК гиростабилизированной платформы, находящейся в режиме автосопровождения цели, на ССК ЛА в вертикальной плоскости (по тангажу)  а также сигналы, пропорциональные угловой скорости линии визирования «ЛА-цель» гиростабилизированной платформы, находящейся в режиме автосопровождения цели, в проекции на АСК в горизонтальной плоскости (по курсу)
а также сигналы, пропорциональные угловой скорости линии визирования «ЛА-цель» гиростабилизированной платформы, находящейся в режиме автосопровождения цели, в проекции на АСК в горизонтальной плоскости (по курсу)  и угловой скорости линии визирования «ЛА-цель» гиростабилизированной платформы, находящейся в режиме автосопровождения цели, в проекции на АСК в вертикальной плоскости (по тангажу)
и угловой скорости линии визирования «ЛА-цель» гиростабилизированной платформы, находящейся в режиме автосопровождения цели, в проекции на АСК в вертикальной плоскости (по тангажу)  Блок 10 модели движения гиростабилизированной платформы ГСН решает в общем виде уравнения:
Блок 10 модели движения гиростабилизированной платформы ГСН решает в общем виде уравнения:

где: Φгсгсн - передаточная функция гиростабилизированной платформы ГСН.
Эти сигналы поступают на первый вход БЦВМ 6 ГСН 2. На ее второй вход поступают сигналы, пропорциональные углу проекции линии визирования «ЛА-цель» на ССК ЛА в горизонтальной плоскости (по курсу) ϕК и углу проекции линии визирования «ЛА-цель» на ССК ЛА в вертикальной плоскости (по тангажу) ϕТ со второго выхода блока 12 модели расчета единичного вектора «ЛА-цель».
В МВУ 3 сигналы формируются в реальном масштабе времени и вводятся в БЦВМ 6 в цифровом виде синхронно с тактом ее работы.
В режиме целеуказания, когда ГСН 2 осуществляет поиск и захват цели (излучателя сигналов 1), величины ϕК и ϕТ, поступающие в БЦВМ 6 из ВМУ 3, вычитаются из аналогичных данных, рассчитанных в БЦВМ 6, т.е. величин углов ожидаемого пеленга цели соответственно по курсу  и по тангажу
и по тангажу  . В результате БЦВМ 6 вырабатывает команды:
. В результате БЦВМ 6 вырабатывает команды:
При этом значения величин ϕК и ϕT принимаются за истинные, поскольку их расчет, а также расчет параметров движения ЛА производится в ВМУ 3 по более точным алгоритмам, с большей частотой и разрядностью, чем в БЦВМ 6. Таким образом, команды ΔϕК и ΔϕТ, поступающие из БЦВМ 6 на гиростабилизированную платформу ГСН 2, являются, по сути, реальной погрешностью выставки ГСН на цель. Это подтверждается тем, что в реальном полете ЛА, когда ϕК и ϕТ не поступают в БЦВМ ГСН и, следовательно, содержимое ячеек БЦВМ, куда они передаются, равно нулю, на гиростабилизированную платформу ГСН из БЦВМ подаются команды (полученные после вычитания нулей)  и
и  , по которым происходит выставка гиростабилизированной платформы ГСН на реальную цель с реальной погрешностью, равной ΔϕК и ΔϕТ.
, по которым происходит выставка гиростабилизированной платформы ГСН на реальную цель с реальной погрешностью, равной ΔϕК и ΔϕТ.
Под действием команд ΔϕК и ΔϕТ гиростабилизированная платформа ГСН 2 с антенной 7 с момента начала выставки ее на цель перемещается в положение ΔϕК и ΔϕТ. В конце этапа целеуказания по команде из БЦВМ 6 происходит переход ГСН 2 к поиску и захвату цели. Если  где Δϕдоп. - допустимый сектор поиска цели, то ГСН 2 осуществляет захват излучателя сигналов 1 на автосопровождение. При этом сигналы, излучаемые антенной 5, принимаются антенной 7 ГСН 2 и поступают в БЦВМ 6.
где Δϕдоп. - допустимый сектор поиска цели, то ГСН 2 осуществляет захват излучателя сигналов 1 на автосопровождение. При этом сигналы, излучаемые антенной 5, принимаются антенной 7 ГСН 2 и поступают в БЦВМ 6.
Необходимым условием полунатурного моделирования этапа целеуказания является предварительная выставка излучателя сигналов 1 относительно ССК ЛА на угол  и
и  Значения
Значения  и
и  фиксируются как по показаниям аналоговых регистрирующих приборов (на схеме не показаны), так и по показаниям цифровой информации из БЦВМ 6. На этом этапе могут отрабатываться и проверяться:
фиксируются как по показаниям аналоговых регистрирующих приборов (на схеме не показаны), так и по показаниям цифровой информации из БЦВМ 6. На этом этапе могут отрабатываться и проверяться:
- управляемость гиростабилизированной платформы ГСН 2 от БЦВМ 6,
- выставка на цель гиростабилизированной платформы ГСН 2,
- способность БЦВМ 6 настраивать ГСН 2 на нужный режим работы,
- способность ГСН 2 осуществлять поиск и захват цели в заданном секторе поиска.
В режиме автосопровождения цели, когда (если) ГСН 2 осуществила захват излучателя сигнала 1, его сигналы принимаются антенной 7 и поступают в БЦВМ 6, которая суммирует информацию, соответствующую пеленгу цели  и
и  а также
а также  и
и  поступающую из ВМУ 3, с соответствующей информацией
поступающую из ВМУ 3, с соответствующей информацией  и
и  а также
а также  и
и  поступающей от ГСН 2, находящейся в режиме автосопровождения неподвижного излучателя сигналов 1. При этом в контур самонаведения ЛА поступает информация:
поступающей от ГСН 2, находящейся в режиме автосопровождения неподвижного излучателя сигналов 1. При этом в контур самонаведения ЛА поступает информация:
В результате, на входе алгоритма самонаведения ЛА в БЦВМ 6 ГСН 2, помимо рассчитанных параметров  и
и  а также
а также  и
и  отражающих работу ГСН в процессе слежения за целью, будут присутствовать реальные сигналы от реальной ГСН
отражающих работу ГСН в процессе слежения за целью, будут присутствовать реальные сигналы от реальной ГСН  и
и  а также
а также  и
и  находящейся в режиме автосопровождения неподвижного излучателя сигналов 1 (имитатора цели). При этом в программно-алгоритмическом обеспечении БЦВМ 6 используются перечисленные параметры по мере выполнения того режима, которому требуется соответствующая информация от реальной ГСН 2. На этом этапе могут отрабатываться и проверяться:
находящейся в режиме автосопровождения неподвижного излучателя сигналов 1 (имитатора цели). При этом в программно-алгоритмическом обеспечении БЦВМ 6 используются перечисленные параметры по мере выполнения того режима, которому требуется соответствующая информация от реальной ГСН 2. На этом этапе могут отрабатываться и проверяться:
- режим самонаведения ЛА (способность бортовых алгоритмов и программ БЦВМ управлять ЛА по информации от ГСН, в данном случае от математической модели движения гиростабилизированной платформы ГСН);
- работа бортовых алгоритмов и программ БЦВМ по обработке информации от гиростабилизированной платформы ГСН;
- влияние имитируемых характеристик системы самонаведения ЛА на системы стабилизации, ориентации, навигации, наведения ЛА;
- влияние шумовых составляющих реальной ГСН, находящейся в режиме автосопровождения неподвижного имитатора цели.
Разбиение на этапы целеуказания и автосопровождения имеет условный характер и в процессе отладки программно-алгоритмического обеспечения БЦВМ и полунатурного моделирования системы самонаведения ЛА, как правило, осуществляется плавный, последовательный переход от первого этапа ко второму.
Использование стенда, содержащего элементы математического моделирования, позволяет проводить отработку взаимодействия всех бортовых систем ЛА, участвующих в работе системы самонаведения ЛА, проверку работоспособности гиростабилизированной платформы ГСН и собственно ГСН, отладку программно-алгоритмического обеспечения БЦВМ ГСН в реальном масштабе времени во всем диапазоне угловых скоростей линии визирования «ЛА-цель» без искажения динамики контура системы самонаведения ЛА. Достоверность результатов, полученных при полунатурном моделировании системы самонаведения ЛА на предложенном стенде и предложенным методом, позволяет в отдельных случаях осуществлять замену натурных испытаний полунатурным моделированием, что обеспечивает значительный экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2637096C2 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| СПОСОБ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610877C1 |
| Способ полунатурного моделирования системы управления летательного аппарата с пассивной или полуактивной или активной головкой самонаведения и устройство для его реализации | 2020 |
|
RU2767956C2 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕЛЕВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2751144C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С АКТИВНЫМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 2018 |
|
RU2692456C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2018 |
|
RU2695496C1 |
| КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ПОЛУАКТИВНОЙ ЛАЗЕРНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2753592C1 |
Изобретение относится к области испытаний и проверки работоспособности головок самонаведения (ГСН). Технический результат - повышение точности моделирования. Стенд содержит излучатель сигналов (имитатор цели), ГСН, вычислительно-моделирующее устройство (ВМУ). ГСН, содержащая БЦВМ, зафиксирована на неподвижном основании, излучатель сигналов зафиксирован на неподвижном основании так, что его продольная ось совмещена с продольной осью ГСН. ВМУ содержит блоки моделей динамики и движения летательного аппарата (ЛА), модели движения цели, модели движения гиростабилизированной платформы ГСН, модели управления гиростабилизированной платформой ГСН, модели расчета единичного вектора «ЛА-цель». Стенд позволяет в реальном масштабе времени проводить полунатурное моделирование системы самонаведения ЛА во всем диапазоне угловых скоростей линии визирования «ЛА-цель» без искажения динамики контура системы. 1 ил.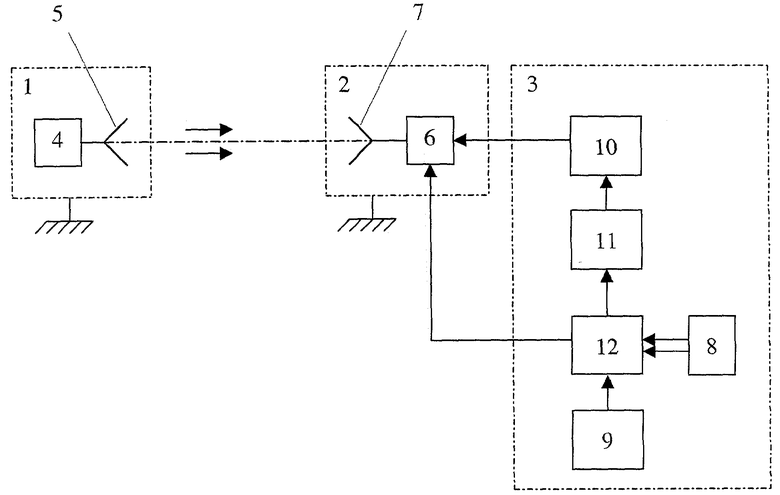
Стенд для полунатурного моделирования системы самонаведения летательного аппарата, содержащий головку наведения, излучатель сигналов, отличающийся тем, что он снабжен приемной антенной, гиростабилизированной платформой, рупорной антенной и вычислительно-моделирующим устройством, а головка наведения зафиксирована на неподвижном основании и выполнена в виде головки самонаведения (ГСН) с бортовой цифровой вычислительной машиной (БЦВМ), к которой подключена приемная антенна, установленная на гиростабилизированной платформе, излучатель сигналов зафиксирован на неподвижном основании и выполнен в виде генератора электромагнитных волн, выход которого соединен с входом рупорной антенны, продольная ось которой совмещена с продольной осью ГСН, вычислительно-моделирующее устройство содержит блок моделей динамики и движения летательного аппарата (ЛА), блок модели движения цели, блок модели движения гиростабилизированной платформы ГСН, блок модели управления гиростабилизированной платформой ГСН, блок модели расчета единичного вектора «ЛА-цель», причем первый и второй выходы блока моделей динамики и движения ЛА соединены соответственно с первым и вторым входами блока модели расчета единичного вектора «ЛА-цель», третий вход которого соединен с выходом блока модели движения цели, первый выход - с входом блока модели управления гиростабилизированной платформой ГСН, а второй выход - со вторым входом БЦВМ ГСН, первый вход которой соединен с выходом блока модели движения гиростабилизированной платформы ГСН, вход которого соединен с выходом блока модели управления гиростабилизированной платформой ГСН.
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2004 |
|
RU2263869C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2002 |
|
RU2207485C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО НАЗЕМНОГО КОНТРОЛЯ УПРАВЛЯЕМОЙ АВИАЦИОННОЙ РАКЕТЫ КЛАССА "ВОЗДУХ-ПОВЕРХНОСТЬ" | 2003 |
|
RU2231732C1 |
| US 5215465 А, 01.06.1993. | |||

