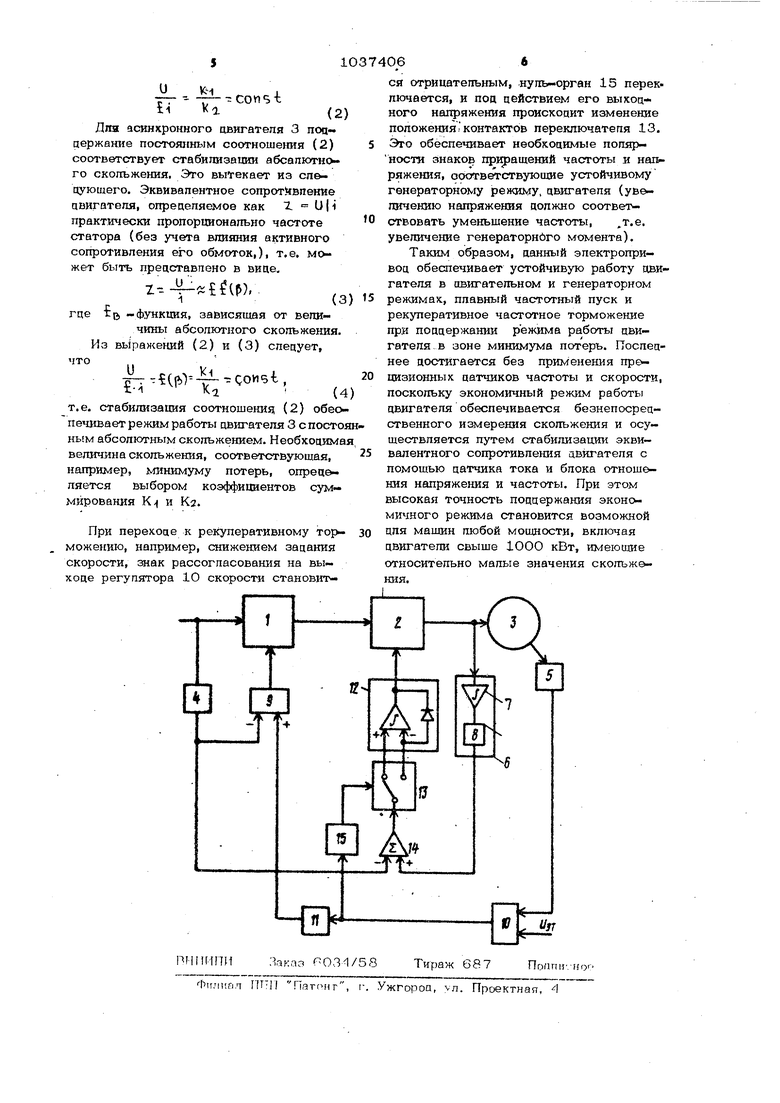
Иаобр&евияв отярсяггоя к эпектротв« нике, в чаогности к эяектропривоцу с асинхрокнымн {хшгатегшмв. Иэввотея частотно-регулируемый эпектропрнвоц, содержащий упраышемый выпрямитель, автономный инвертор тока, асинхронный цннпгатеггь, датчики тока, напряжения и скорости, а также регулятор тока с блоком токоогранич НИН и регулятор скорости В данном элёктропрйвоце реализуетс закон частотного управления асинкрони ным двигателем U Сt-const с помощью положитеггьной обратной связи между напряжением цвигатепя и частотой и вертора (выход датчика напряжения подключен к управляющему вкоду авто цомного инвертора тока). Недостатками этого эпектро фивода являются неоптимальный при переменн нагрузке закон частотного управления и невозможность рекуперативного тормо жения, так как наличие указанной положительной обратной связи между Hanps жением двигателя и частотой инвертора приводит к неустойчивости привода при переходе двигателя в генераторный режим, Наиболее близким к предлагаемому по технической сущности и достигае мому результату является асинхронный электропривод с частотно-токовым упр лением, содержащий асинхронный двигатель к посгтедовательно соединенные управляемый выпрямитеиь, автономный инвертор 2 тока,выходом подключен-. ный к асинхронному двигателю, датчики тока и скорости функциональный преобразователь S а также регуляторы тока и скорости 2 . Регулятор скорости представляет собой усилитель-ограничитель, который через вспомогательный выпрямитель соединен с входом регулятора тока, воздействующего на управляемый выпр$ь митель. Частота инвертора определяет ся как сумма сигналов датчика скорост и выходного сигнала усилителянограничителя. Недостаток такого привода - низкая точность поддержания режима двигателя в зоне минимума потерь, особенно при мощностях от 1000 кВт и выше. Это обусловлено относительно малыми значениями скольжения мощных двигателей {0,5 - 0,8%), вследствие чего усилитель-ограничитель, функциональный преобразователь и датчик скорости должны обладать точностью не ниже 6 0,05 - 0,08, что технически трудно осуществимо и требует применения спениальнык сложных цифровых устройств. Указа шое обстоятельство практически исключает возможность применения известного асинхронного электропривода с чао-, тотно-токовым управлением при мощнооти 1000 кВт и выше. Цель изобретения - упрощение и повышение точности поддержания режима работы двигателя в зоне минимума потерь. Поставленная цепь достигается тем, что в частотно-регулируемый электропривод содержащий асинхронный двигатель, последовательно включенные управляемый выпрямитель, автономный инвертор тока, выходом подключенный к асинхронному двигателю, датчики тока и скорости, выходы которых соединены с первыми входами соответственно регулятора тока и скорости, сумматор, выход которого связан с управляющим входом автономного инвертора тока, причем выход регул51тора скорости подключен к второму входу регулятора тока через вспомогательный выпрямитель, а выход регулятора тока - к управляющему входу управляемого вырямителя , дополнительно снабжен интегратором с однопол5фным выходом, инвертирующим и неинвершрующим входами, управляемым переключателем, нуль-органом и блоком отношения напряжения и частоты, при этом сумматор выполнен с инвертирующим и неинверт рующим входами, вход блока отношения напряжения и частоты соединен с выходом автономного инвертора тока, к управляющему входу которого подключен выход интегратора с одаополярным выходом, а инвертирующий и неинвертирующий его входы соединены с выходами управляемого переключателя, основной вход которого соединен с выходом сумматора, к неинвертирующему входу которого подключен выход блока отношения напряжения и частоты, а к инвертирующему - выход датчика тока, выход регулятора скорости соединен с входом нуль-органа, выход которого подключен к управляющему входу переключателя . На чертеже представлена схема предлагаемого частотно-регулируемого электропривода. Вход управляемого выпрямителя 1 предназначен цля подключения к питающей
электросети, при этом вьшрямитегаь 1 выполняет роль регулируемого источи ка ОЛЯ автономного инвертора 2 тока, послецовательно соеоиненного с выпрямителем, а выходом подключенного к асинхронному цвигатепю 3. Электропривод имеет датчик 4 тока, датчик 5 скорости и блок 6 отношения напряжения и частоты, выполненный, например, в вице последовательно соединенных интегратора 7 и неуправляемого вьшрямит ля 8, а также содержит регулятор 9 тока с блоком токоограничения и регулятор 10 скорости связанные с управляющим входом выпрямителя 1, причем выход регулятора 10 скорости соединен с входом регулятора 9 тока через вспомогательный выпр51митель 11. Управпяюишй вход инвертора 2 (вход оадак шего генератора его системы управления) подключен к выходу интегратора 12 с однополярным выходом, инвернтируюший и неинвертирующий входы которого соединены с выходом управляемого переключателя 13, Основной вход переключателя 13 подсоединен к выходу сумматора 14, неинвертирующий вход которого соединен с выходом блока 6 отношения напряжения и частоты, а инвертирующий вход- с выходом датчика 4 тока. Выход регулятора 10 скорости через нуль-орган 15 соединен с управляющим входом переключат&ля 13.
. Электропривод работает следующим образом.
При подаче силового напряжения на вход выпрямителя 1 и сигнала задания скорости УЭТ на первый вход регулятора 10 скорости в системе упра&ляемый выпрямитель 1-автоном1п 1й инвертор 2 - асинхронный двигатель 3 устанавливается ток на уровне токоограничения регулятора тока. Под действием положительного знака рассогласования навыходе регулятора 10 скорооти нуль-орган 15 срабатывает и устаналивает переключатель 13 в положение, при котором выход сумматора 14 -подключается к неинвертирующему входу интегратора 12.
Двигатель 3 при подаче силового напряжения не вращается, поэтому напряжение на его зажимах мало. Блиэко к нулю также и напряжение на выходе блока 6 отношения напряжения и частоты. Действие выходного сигнала датчика 4 тока, подключенного к инвер п тирующему входу сумматора 14, оказывается определяющим по сравнению с воздействием сигнала от блока 6, пошклю ченного к неннвертирующему вхоцу сум матора 14. Поэтому напряжение на
выходе интегратора 12 равно, нулю, так как данный интегратор не может иметь отрицательных выходных напряжений. Частота работы инвертора в этом случае определяется начапьнскй (лусковой) частотой задающего teaeparopa, входящего в систему управпения 8HBet тора 2. Если двигателя 3, развиваемый им на пусковой часяррте и то ке на уровне токоограничення, превышает момент сспротивпешся нагрузки частота вращения двигателя 3 начнет увеличиваться. Пря этом уменьшается скольжение и увеличивается напряжение на статоре двигателя 3 в на выходе
блока 6 отношения нагфяження и частоты.
При некотором значении скольжения выходное напряжение блока 6 оказывает ся равным, а затем превышающим выхоо
ной сигнал датчика 4 тока. На выкоае интегратора 12 и, следовательно, на управляющем входе инвертора 2 появи1 ся нарастающее положительное Hanps жение и частота инвертора 2 начнет
увеличиваться. Разгон двигателя в дaпЬi нейшем происходит при .непрерывном увеличении частоты до значения, определяемого заданием регулятора скорости. Значение тока под действием регулятора 10 уменьшится, что приведет к уменьшению электромагнитного момен та двигателя 3.
В установившемся режиме на входе интегратора 12 и выходе сумматора 14 равны нулю, т.е. выходные сигналы датчика 4 тока и блока 6 oiw ношения напряжения и частоты компено руют друг друга. Такое состояние хе рактеризуется соотношением.
W :.... и,
- (1)
где -i , О фазное Hanpsiжение и частота статора двигателя 3. К;,, коэффициенты суммирования выходных сигналов датчика 4 тока и блока 6 OTW ношения напрях ения и частоты.
Таким образом, в установившемся режиме обеспечивается стабилизация соотношения
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1984 |
|
SU1274109A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Частотно-регулируемый асинхронный электропривод | 1983 |
|
SU1119155A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ двухзонного управления частотно-регулируемым электроприводом и устройство для его осуществления | 1989 |
|
SU1676059A1 |
| Асинхронный частотно-регулируемый электропривод | 1981 |
|
SU957403A1 |
| Устройство для управления асинхронным электродвигателем | 1979 |
|
SU864479A1 |
ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный цвигатепь, поспецоватепьно включенные управп яемый выпрямитель, автономный инвертор. .тока, выходом пСЬключенный к асинхронному двигателю, датчики тока и скорости, вы ходы которых соединены с первыми входами соответственно регулятора тока и р&гупятора скорости, и сумматор, выход регулятора скорости подключен к второму входу регулятора тока через BcnoMtv гательный выпрямитель, а выход регу лятора тока - к управляемому входу выпрямителя, отличающийся тем,, что, с целью упрощения и повышения точности поддержания режима работы асинхронного двигателя в зоне минимума потерь, в него ввеаен интех. ратор с однопопярным выходом и иньв(тирующим и неинвертирующим входамя.упра)ляемый перекпючатель,нупь-орган и блок отно шения напряжения и частоты,а сумматор выполнен с инвертирующим и неинверти- рующим входами, причем вход блока отношения напряжения и частоты со динен с выходом автономного инверторного тока, к управляющему входу которого подключен однопопярный выхоц (Л интегратора, а инвертирующий и неинвертирующий входы указанного интеграт ч а соединены с выходами управляемого переключателя, основной вход которого соединен с выходом сумматора, к неинвертирующему входу которого подключен выход блока отношения напряжения о : и частоты, а к инвертирующему - выход датчика тока, выход регулятора скорости соединен с входом нуль-органа, выход 4;ib которого подключен к управляющему о вхоцу переключателя. О)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| и цр, Моиьные преобразователи цля асинхронной машины 3500 кВт, ЭП, сер, Пр&образоватепьная техника, вып, 10, 1981, с, 193, , 2, Берштейн А, Я, и цр, Тиристорные преобразователи частоты в электро приводе, М,, Энергия, 1980, с, 191, | |||
