Изобретение относится к электротехнике и предназначено для использования в системах автоматизированного электро привода переменного тсжа. Известны устройства цля частотного управления асинхронным двигателем, содержащие автономный инвертор тока и систему управления, формирующую частоту тока статора асинхронного двигателя как сумму заданной частоты скольжения и измеренной частоты вращения ротора Недостаток таких устройств - наличие сочлененного с двигателем датчика частоты вращения ротора, что ограничивает их область применения. Кроме того, отсутствие контроля взаимной ориенташга векторов тока и потокосцепления двигателя не позволяет обеспечить высокие динамические показатели электропривода Наиболеее близким к изобретению по технической сущности является устройство, которое содержит преобразователь ча тоты с автономным инвертором тока, датчики тока статора и потокосцеплений ротора двигателя, задатчикн активной и реактивной составляющих тока cтaтopa регулятор тока, блок управления инвертором, а также преобразователь координат и векторный анализатор, которые обеспечивают щзинудительную ориентацию тока статора относительно вектора потокосцеплений ротора sj . С помощью преобразователя координат вычисляются заданные значения составляющих тока статора ly у в неподвижной системе координат- у/упо значениям этих составляющих в системе координат, связанных с вектором потокосцепления ротора. Составляющие Уг У4поступают на векторный анализатор, который вычисляет модуль заданного вектора тока статора/t / и составляющие единичного BeKTqjacojjS -ai/l jS направление которого совпадает с направлением вектора тока статора. Сигналы / подаются на входы блока управления инвет эом, выходы которого связаны с управяющими электродами тиристфов автономого инвертора.
Наличие в устройстве преобразователя координат и векторного анализатора, которые в сумме сопержат 12 блоков умножения, существенно усложняет систему регулирования иснижает точность ее работы,
Цель изобретения упрощешге устройства и повышение точности его работы. Поставленная цель достигается тем, что в устройство, содержащее преобразователь частоты с автономным инвертором тока, регулятор тока, подключенный выходом к управляемому выпрямителю, задатчики активной и реактивной составляющих тока статора, подключенный к регулятору тока цатчшс тока статора, блок управления инвертором и датчик по токосцепления ротора двигателя, введены формирователь управляющего напряжеш1я и блок компараторов, при этом первые входы форм фователя управляющего напряже1шя соединены с задатчиками активной и, решстивной составляющих тока статора, вторые - с датчиками потокосцеплешгй ротора, первый выход - со входом регулятора тока, а второй - с одшгм из входов блока компараторов, ко второму входу которого подключены цатчшси потокосцеплений; j ротора, а выход блока компараторов соединен с блоком управлештя -инвертором.
Целесообразно при этом выполнеьше , формирователя управляющего напряже 1ия в виде устройства, содержащего фи функциональных преобразователя, два из ко-торых реализуют квадратичную функцию (), а тре№й - функцию извлечеrojH Kopira квадратного (J/ ), сумматор, блок деления, блок умножеш1я и блок вычисления модуля пбтокосцепления ротора. Входы фушсциональныу. преобразователей, реализзющих квадратичную функшпо, являются первыми входами формирователя, а их выходы через сумматор соединены со входом функционального преобразователя, реализующего функгшю извлечения квадратного корня. Выход преобразователя, являющийся первым выходом формирователя, соединен с выхойом делимого блока целения, вход делителя которого подключен к задатчику активной составляющей тока. Вьтеод блока деления подключен ко входу блока умножения, второй вход которого соединен с выходом блока вычислеш Я модуля потокосцеплегшя ротора, причем выход блока
умножегшя Является вторым вьзходом формирователя.
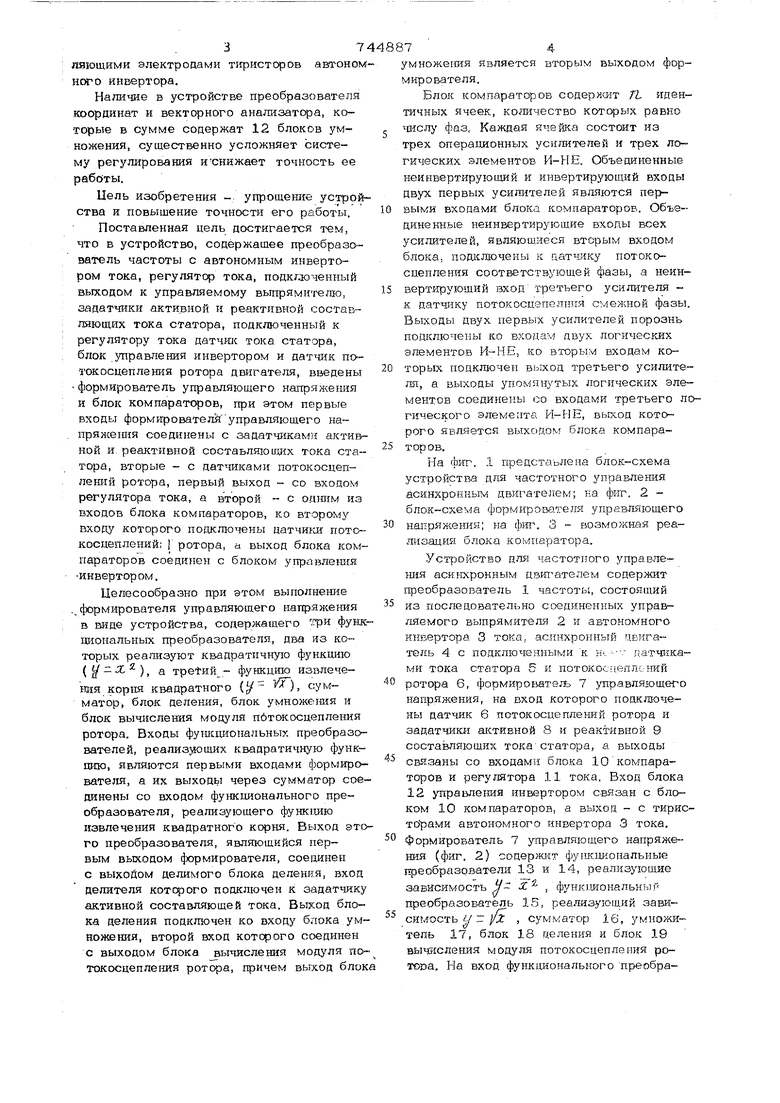
Блок компараторов содерхшт 7L идентичных ячеек, ко шчестБо которых равно
чн:слу фаз, Калздая ячеГжа состоит из трех операционных усилителей и трех логических элементов И-НЕ. Объединенные неинвертируюший и инвертирующий входы двух первых усилителей являются первыми входами блока компараторов. Объединенные неинвертирующие входы всех усилителей, являюшдеся вторым входом блока, пошслючены к цатчику потокосцепления соответствующей фазы, а неинвертирующий вход третьего усилителя к датчику потокосцепелния смежной фазы. Выходы двух первых усилителей порознь подключены ко входам двух логических элементов И-НЕ), ко вторым входам которых подключен выход третьего усилителя, а выходы упомянутых логических элементов соединены со входами третьего логического элемента И-НЕ, выход которого является ВЫХОДОК блока компараторов.
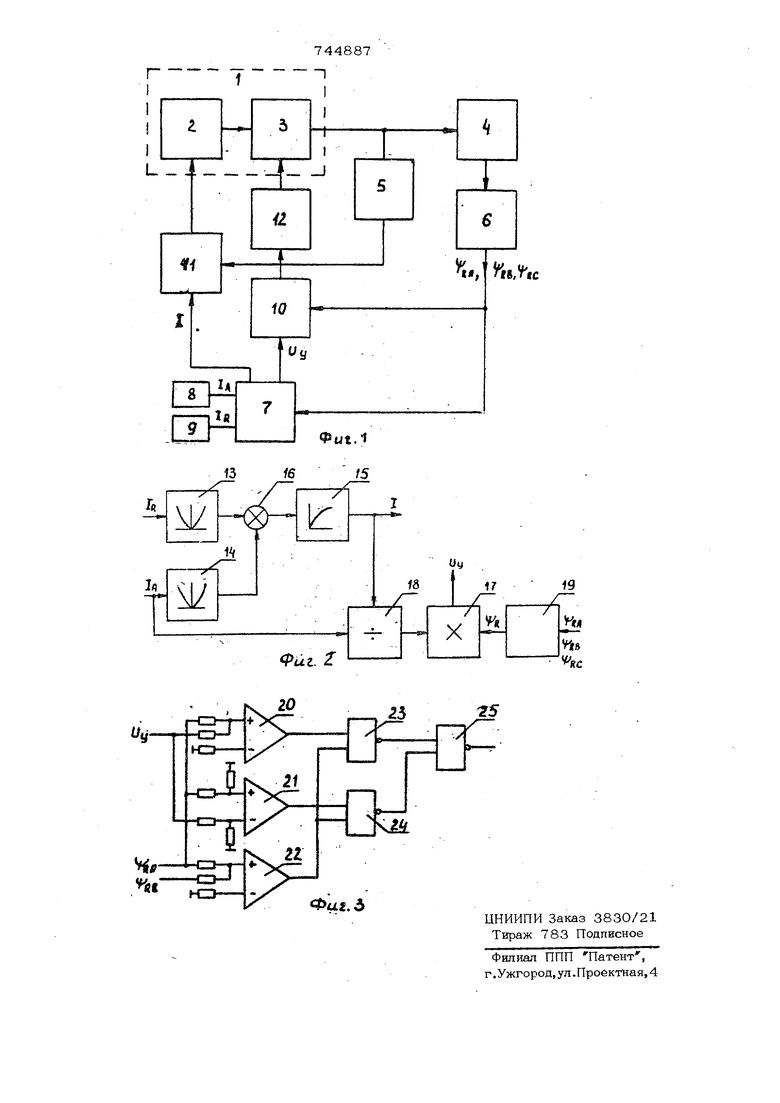
На . 1 представлена блок-схема устройства для частотного управлэЕшя асинхронным двигателем; ка фггг. 2 блок-схема формирователя управл гющего
ншт.ряже1шя; на фиг. 3 - возможная реализшдия блока компаратора.
Устройство для частотного управления асинхронным двш ателем содержит преобразователь 1 частоты, состоящий
из последовательно соединенных управ/шемого выпрякштеля 2 и автономного инвертора 3 тока, асинхронный цвигатель 4 с подключенными к н-- , ми тока статора 5 и потокосцеплоний
ротора 6, формирователэ 7 управляющего напряжения, на вход которого подключены датчик 6 пстокосцеплении ротора и задатчики шстивной 8 и реактИвной 9 соста1У1Яющих тока статора, а выходы
связаны со входами блока 10 компараторов и регулятора 11 тока, Вход блока 12 отправления инвертором связан с блоком 10 компараторов, а выход - с тиристорами автономного инвертора 3 тока.
формирователь 7 угяравляющего напряжения (фиг. 2) содерж-нт функциональные преобразователи 13 и 14, реализующие
зависимость J/- Х - , функилонапьный преобразователь 15, реа.чизующий зависимость у г//г , сумматор 16, умнож1{тепь 17, блок 18 целения и блок 19 вы1щсления модуля потокосцеплення ротооа. На вход функционального преобраК вателя 13 лопается сигнал задания реактивной составляющей тока статопа.Х на вход функционального преобразователя 14 и блока 18 деления - сигнал активной составляющей тока статора-wAj . Сигнал с выхода функциональное) преобразователя 15, равный подается на вход регулятора 11 тока, а сигнал U у с выхода умножителя 17, равный где j - модуль потокосцепле ния ротора, подается на вход блока 10 компараторов. Блок 10 компараторов сос тоит из трех идентичных ячеек, по одной на каждую фазу. Схема ячейки, принадлежащей фазе А двигателя (фиг. 3), соaepJKHT три операционных усилителя 20, 21 и 22, три логических элемента И-НЕ 23, 24 и 25, логический сигнал с выхода которых подается на вход блока 12 управления инвертором. Устройство работает следующим образом.. Переменный ток питающей сетивыпрям ляется с помощью управляемого вы прямителя 2 и затем инвертируется автономным инвертором 3. Заданное значение модуля результирующего вектора тока двигателя обеспечивается регулятором 11 тока, на входе которого производится сравнения сигнала задания У с сигналом обратной связи, снимаемым с датчика 5 тока. Расчеты и эксперименты показывают, что при правильной нас-тройке контур регулирования тока можно считать идеаль ным, т.е. модуль тока статора в установившихся и переходных режимах соответс вует сигналу задания J на входе регулятора 11 тока. Аргумент результирующего вектора тока статора (т.е. частоты и фазы тока) двигателя при питании его от инвертора тока определяется-моментом подачи открывающих импульсов на тиристоры автономного инвертора 3 с вы хода блока 12 управления. Это свойство автономного инвертора тока позволяет осуществлять принудительную взаимную ориентацию вектора тока статора и по- гокосцёплення ротора двигателя без использования .векторного анализатора и преобразователей координат, что и положено в основу предлагаемого устройства. Поскольку фронт открывающего импульса фор мируется в момент времени, когда напряжения на входах компаратора равны, то учитывая синусоидальность кривой потоко сцепления, получим иу-кЦ,в-илЧ(1) где If угол сдв11га между первыми гармоЕикам. тока статора и потокрсцеплеш1я ротора соответствуюьцей фазы, С йругой стороны, в соответствия с фиг, 2 .(2) Из (1} и (2} п олу чаем Лд Y, СОГ f, откуда следует, что в устройстве сигнал задания Б статическгпс и динамических релшмах однозначно определяет проекцшо тока статора на направление вектора потокссцеплеш я ротора, а сигнал j/t - ортогональную составляющую. тока. Таким образом, воздействуя на (УOf сигналы заданля у/г а J можно, осуществлять независгамое регулирование соогЕетственно момента и потока асинхронной маыдины, подобно тому, как это обеспечивается регул1фоваш1ем тока якоря и тока возбуждешш машины постоянного тока, Если У/; а J/ регулггровать вручную то Двигатель развивает постоянный момент (у{о от частоты вращения ротора. Если необходимо сфор- MiipoBaTb механические, характеристиюг другого вида, следует нспользов ать внешнюю обратную-связь по скорости, как это выполняется в системах подчиненного регуллрования на постачнном тске. Блок 12 утфавлення инвертором осуществляет логическое преобразование выходных сигналов блока компараторав 10, изменяя юс yглoв o продолжительность от 180 до 120 и усиливает их по мощности, Использовашю данного устройства поэволяет- упростить систему частотного управления асинхронным двигателем, уменьшить в ней количество ггелинейных эле меатоз, дающих основную .погрешность, и тем самым улущиить качественные по казатешг системы. Применение устройства - для электропривода высокопроизводительных грузоподъемных механизмов, согласно расчетам к экспериментам позволяет повысить их производительность на 3Q-4O%. Е ормула изобретения 1. Устройство для частотного управлеШ{Я асинхронным двигателем, содержащее преобразователь частоты с автономным нвертором тока, связанным с блоком управления, регулятор тока, подключенный ВЫХОДОК к управляемому -выпрямителю прв образователя, частоты, задатчики активной и реактивной составляющих тока ста тора, датчик тока статора, выходом подключенный к регулятору тока, блок упра&пения инвертором и датчики потокосцеплений ротора двигателя, отличающ е е с я тем, что, с целью упрошеш- я устройства и увеличения точности его работы, введены формирователь управляющего напряже шя и блок компараторов-, причем первые входы формирователя управлш щего напряжения соединены с аацатчнкам активной и реактивной составляющихтока статора, вторые - с датчками потокесцеплений ротора, первый выход - со входом регулятора тока, а второй - с
одним из входов блока компараторов,ко второму входу которого подк.щочены датЧ1ЖИ потокосцеплений ротора, а выход блока компараторов соединен с блоком управления инвертором.
2. Устройство, по п. 1, о т л к ч а ю ш. е е с я тем, что формирователь управляющего, напряжения содержит три фуТнщиональпыхггреобразоватехш, цва из которых щзедназначены цпя реализации квадратичной зависимости , а третнй - для реализации функшш из&ггечеюшквацратного корня {Ч , сумматор, блок делеьшя, блок умножеш-ш и блок вычиспения модуля потокосцеплен1 :я ротора, причем входы фушсциональных преобразователей, реализующих квадратячяую зависимость, являются первыми в:к.одами формирователя, а их выходы через сумNSaTop соединены со вxoдOlv функциональ- ного преобразователя, реализующего фунхшло извлечения квадратного корн, выхоп которого. Являющийся первым выходом
формирователя, соединен с выходом делимго блока деления, вход делителя которого подключен к задатчику активной составляющей тока, а выход - к блоку умножеmw, второй вход которого соединен с блоком вычисления модуля потокосцеплення ротора,- причем выход блока умножения является вторым выходом формирователя.
3„ Устройство по п. 1, отличающее с я тем, что блок компараторо содержит Ti ячеек, количество которых равно числу фаз, каждая из которых составлена КЗ трех onepaimoHHbix усилителей и трех логических элементов И-НЕ, причем выходы двух 5сила:телей порознь подключены- ко входам азух логических элемтов, ко вторым входам которых пош пючек выход третьего усилителя, а выходы упомянутых логичесютк: элементов соединены, со входами третьего логического элемента И-НЕ, выход которого является выходом бяока, причем объединенные неинвертирую шяй и инвертирующими входы цв5х nepBbrs .усилителей являются первыми входами бпока. объединенные неинвертируюище входы всех усилителей, являющиеся втг;рым входом блока, подключены к датчику потокосцеплёния соответствующей фазы, и нейнвертирующий вход третьего - к датчику потокосцеплешя смежной фазы,
Источншш информации, принятые во внимание при экспертизе
1.Патент США № 3671881, кп. 318-227, 1972.
2.Патент ФРГ .-fc 1941312, кп. 21 С 58/36, 1973,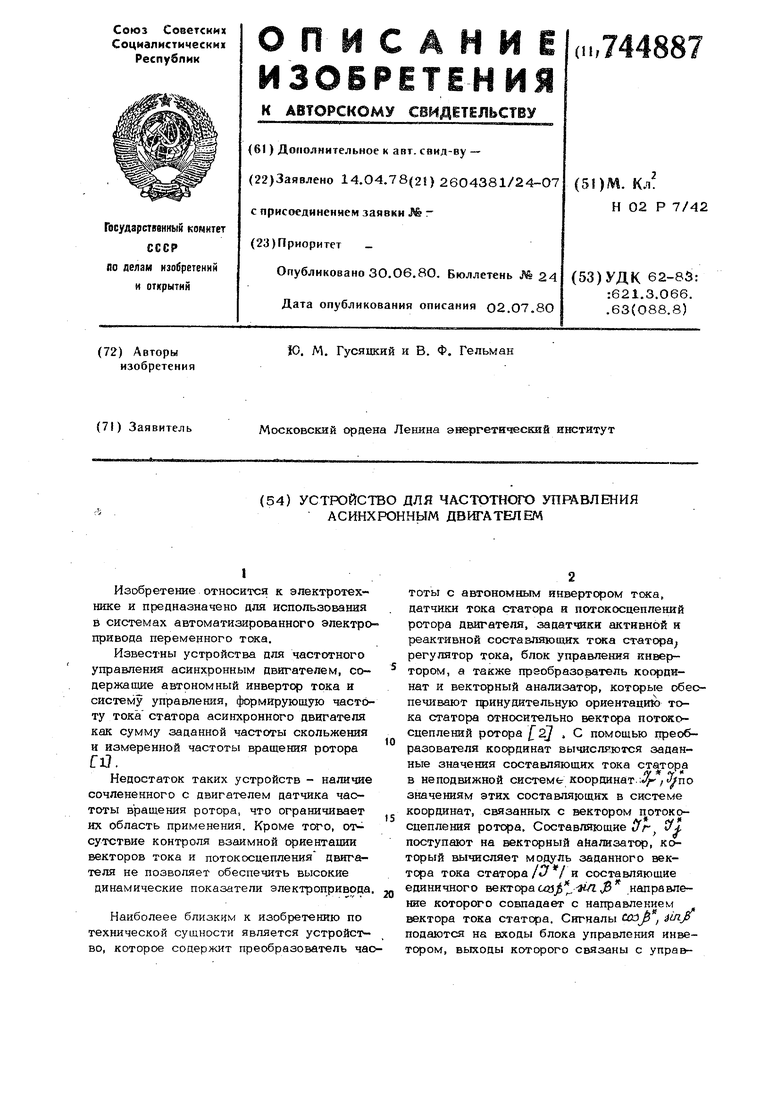

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| УСТРОЙСТВО ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ НА ОСНОВЕ ТРЕХФАЗНОГО ТРЕХУРОВНЕВОГО АВТОНОМНОГО ИНВЕРТОРА NPC | 2023 |
|
RU2821420C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |