Изобретение относится к электропривода корректоров положения фар.
изобретения - повышение надежности .
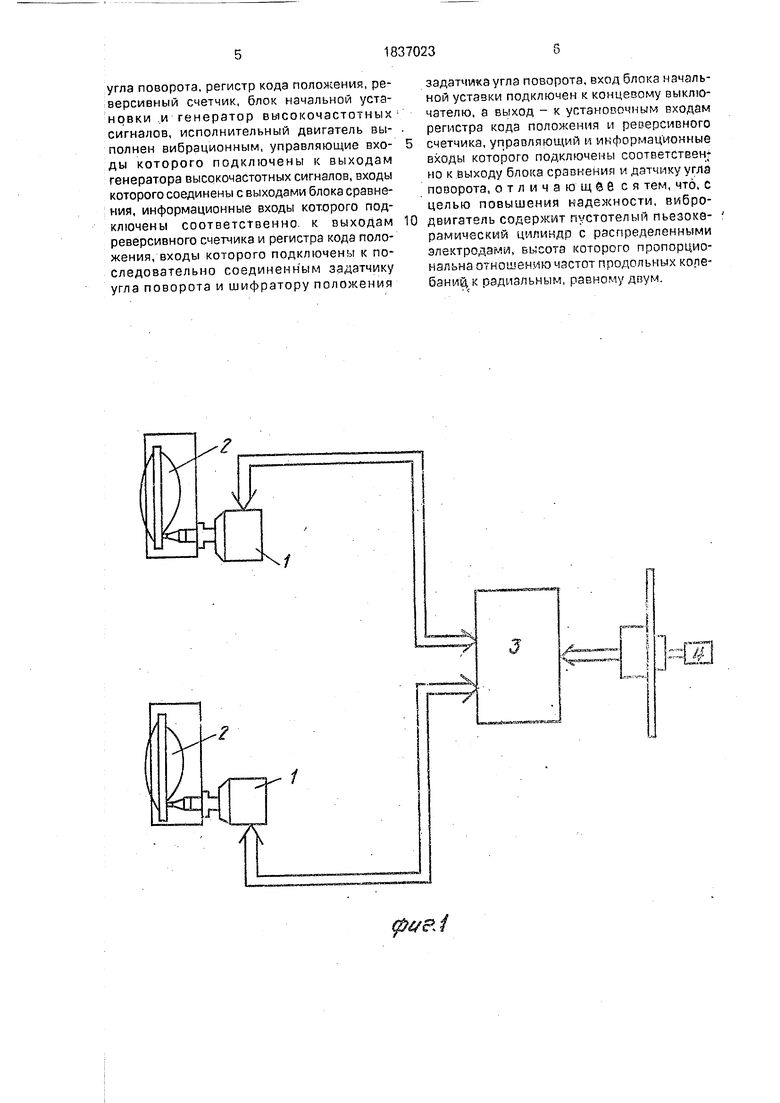
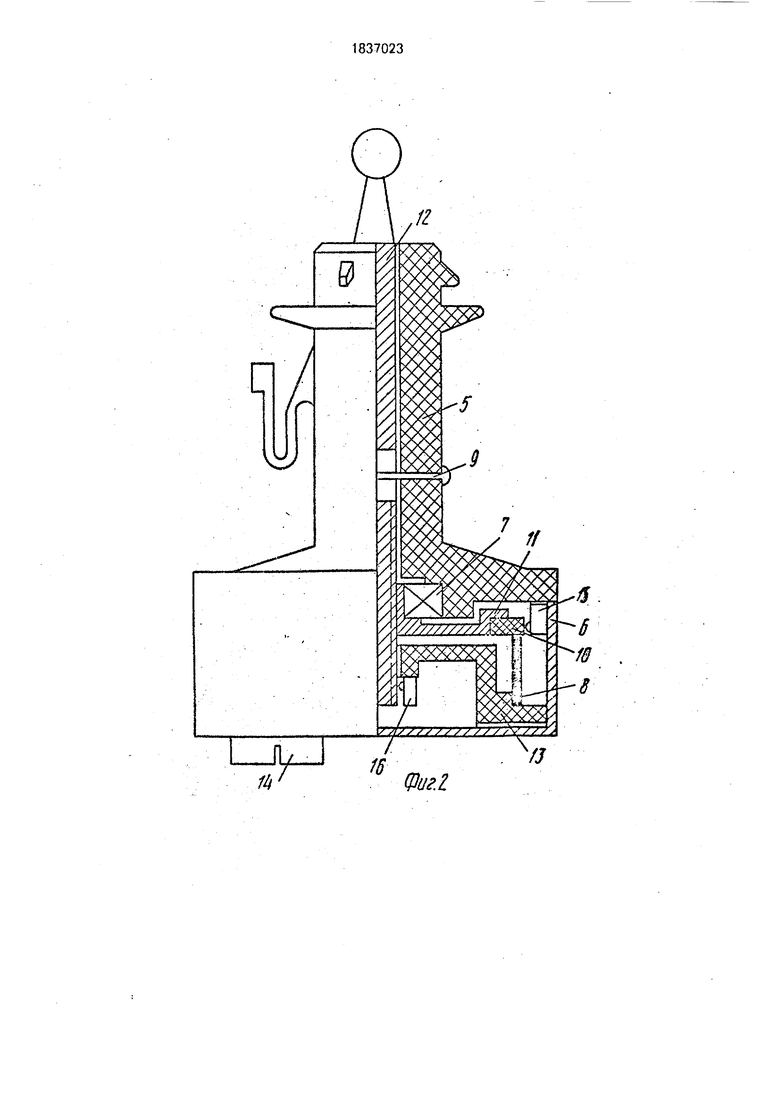
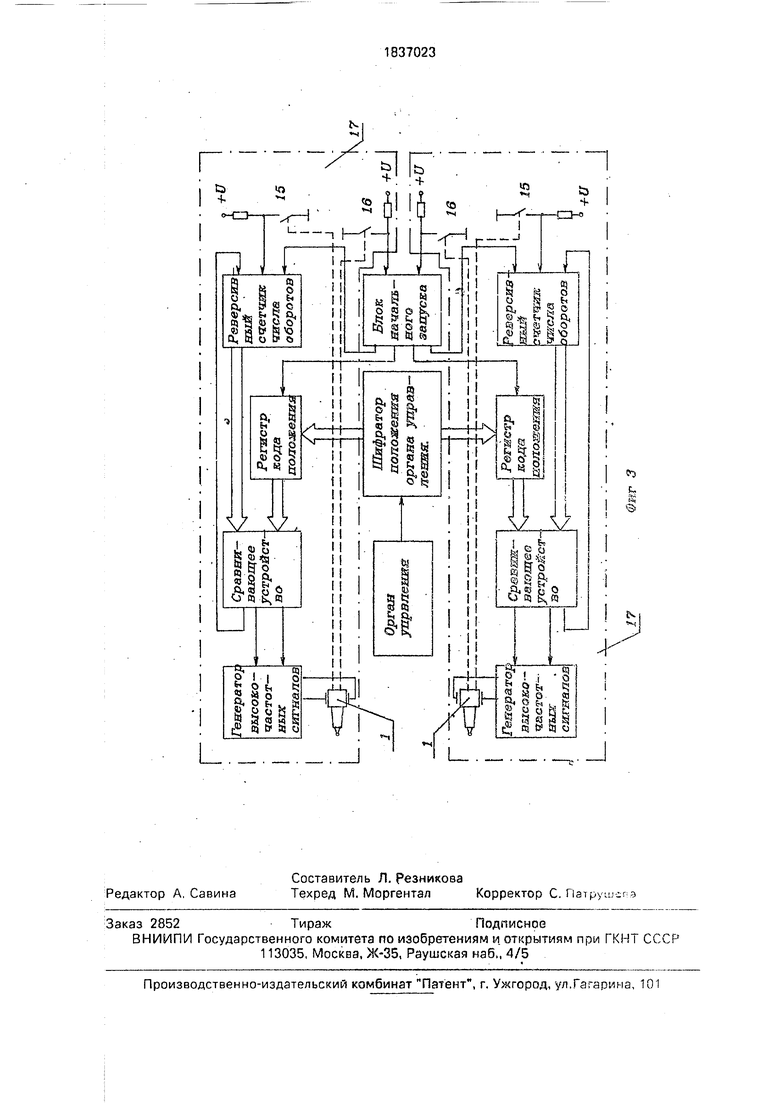
Ьа фиг. 1 показана схема корректора положения фар: на фиг. 2 - конструкция пьезовибродвигателя с разрезом: на фиг. 3
-.функциональная схема управления пьезо- вибродвигателями.
Устройство для регулирования наклона фар транспортного средства содержит исполнительные пьезовибродвигатели 1 для каждой фары. Шток пьезовибродвигателя шарнирно подсоединен к поворачиваемой фаре 2. Управление пьезовибродвигателями осуществлено цифровой схемой 3. Органы управления 4 расположены на передней панели автомобиля.
Пьезовибродвигатель состоит из верхней части корпуса 5 с элементами посадки, нижней части корпуса б, подшипника 7, пье- зокерамического цилиндра 8 радиальной поляризации, штифта 9. Геометрические размеры пьезокерамического цилиндра 8 определены экспериментально-аналитическим методом. При заданных постоянных значениях диаметра и толщины стенки пьезокерамического цилиндра высота его является переменной величиной и-определена экспериментальным путем дл.я получения на торце пьезокерамического цилиндра оптимальных рабочих колебаний, обеспечивающих режим бегущей волны, оптимальная форма которых возникает на торце пьезокерамического цилиндра при отношении частот колебаний продольных к поперечным, равном двум. На торце пьезокерамического цилиндра в местах возбуждения наибольшей амплитуды колебаний жестко закреплено рабочее кольцо 10 на торце фланца 11, закрепленного на конус вала 12. Для центровки вала используется переходное основание 13, Питание пьезовибродвигателя осуществлено через разъем 14, .Сигнал о числе оборотов рабочего кольца снимается с датчика оборотов .15. Крайнее положение фары Определяется информацией с концевого выключателя 16.
Цифровая схема управления пьезовиб- родвигателями состоит из двух одинаковых каналов 17. Каждый канал.состоит из реверсивного счетчика числа оборотов пьезовибродвигателя 1, регистра кода положения органа управления, устройства сравнения двух кодов, генераторов электрических колебаний, питающих пьезовибродвигатели.
Кроме этого, цифровая схема управления содержит общие для двух каналов блоки: шифратор положения органа управления и блок начального запуска. В схеме управления имеются входы для приема сигналов от датчика числа оборотов 15 и от концевого выключателя 16 каждого пьезовибродвигателя.
Устройство для регулирования положения фар работает следующим образом.
Органом управления 4 водитель задает требуемое положение фар. Шифратор положения органа управления выдает код, который записывается в регистры кода положения о&оих каналов. С выхода регистров сигналы поступают на устройство сравнения кодов. На устройство сравнения кодов поступает также код текущего положения штока пьезовибродвигателя, который находится в реверсивном счетчике чис- ла оборотов. Устройство сравнения кодов сравнивает поступившие коды и выдает управляющие сигналы на генераторы высокой
частоты. Высокочастотные сигналы с генераторов подаются через разъемы 14 пьезо- вибродвигателей на распределенные электроды пьезокерамического цилиндра, вызывая на торец пьезокерамического цилиндра бегущую волну, которая приводит в движение фланец 11 и через червячную передачу вал 12. Направление движения вала 12 определяется управляющим сигналом с устройства сравнения кодов. По мере вращения фланца 11 сигнал с датчика числа оборотов поступает в реверсивный счетчик числа оборотов. При равенстве кодов требуемого и текущего положения фар управляющий сигнал с устройства сравнения
блокирует работу высокочастотных генераторов. Вращение фланца прекращается. Схема управления не отключается от бортовой сети автомобиля и постоянно готова к работе.
При подаче питания на цифровую схему
управления 3 сигналы с высокочастотных генераторов подаются через разъем 4 на распределенные электроды пьезокерамического цилиндра и фланец 11 начинает вращаться, выдвигая вал пьезовибродвигателя. В результате этого фара поворачивается в крайнее положение до тех пор, пока не сработает концевой выключатель, расположенный на вибродвигателе. В результате
срабатывания выключателей происходит установка реверсивных счетчиков числа оборотов в нулевое состояние, а в регистр положения органа управления записывается код положения ручки управления. Вал 12
пьезовибродвигателя приходит в поступательное движение, устанавливая фары в положение, заданное ручкой управления.
Устройство для регулирования наклона фар транспортного средства с приводом,
имеющим пьезокерамический цилиндр и использующим эффект бегущей волны, возникающий на его торце, значительно проще, меньше по размерам и имеет большую стабильность работы по сравнению с
аналогичными устройствами.
Формула изобретения Устройство для регулирования наклона фар транспортного средства, содержащее исполнительный двигатель, механически связанный с регулируемой фарой, задатчик и датчик угла поворота, концевой выключатель, механически связанный с подвижной частью исполнительного двигателя, и блок сравнения, шифратор положения задатчика
угла поворота, регистр кода положения, реверсивный счетчик, блок начальной установки ,и генератор высокочастотных сигналов, исполнительный двигатель выполнен вибрационным, управляющие входы которого подключены к выходам генератора высокочастотных сигналов, входы которого соединены с выходами блока сравне- : ния, информационные входы которого подключены соответственно, к выходам реверсивного счетчика и регистра кода положения, входы которого подключены к последовательно соединенным задатчику угла поворота и шифратору положения
задатчикауглз поворота, вход блока начальной уставки подключен к концевому выключателю, а выход - к установочным входам регистра кода положения и реверсивного счетчика, управляющий и информационные входы которого подключены соответственно к.выходу блока сравнения и датчику угла поворота, отличающей ся тем, что, с целью повышения надежности, вибродвигатель содержит пустотелый пьезока- рамический цилиндр с распределенными электродами, высота которого пропорциональна отношению частот продольных коле- бани к радиальным, равному двум.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ КЛЕЙМЕНИЯ И РАЗМЕТКИ ДЕТАЛЕЙ | 1967 |
|
SU216469A1 |
| Устройство для управления шаговым вибродвигателем | 1980 |
|
SU920902A1 |
| ИЗМЕРИТЕЛЬ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА В ДИЗЕЛЬ | 2002 |
|
RU2211364C1 |
| Опора прямолинейного перемещения | 1979 |
|
SU863901A1 |
| ИЗМЕРИТЕЛЬ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА В ДИЗЕЛЬ | 2003 |
|
RU2241138C2 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Вибрационное устройство для перемещения малогабаритных объектов | 1982 |
|
SU1148820A1 |
| Устройство для управления положением регулируемых шипов шины транспортного средства | 1985 |
|
SU1600971A1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
Использование: в электроприводах корректоров положения фар транспортного средства. Сущность изобретения: устройство для регулирования наклона фар транспортного средства содержит исполнительные пьезовибродвигатели 1 для каждой пары. Шток пьезовибродвигателя шарнирно подсоединен к поворачиваемой фаре :2. Управление пьезовибродвигателя- ми осуществлено цифровой схемой 3. Пье- зовибэодвигатель состоит из верхней части корпура 5 с элементами посадки, нижней части jKopnyca 6, подшипника 7, пьезокера- мичеакого цилиндра 8 радиальной поляризации, штифта 9. Геометрические размеры пьезокерамического цилиндра 8 определены экспериментально-аналитическим методом. При заданных постоянных значениях диаметра и толщины стенки пьезокерамического цилиндра высота его является переменной величиной и определена экспериментальным путем получения на торце пьезокерамического цилиндра оптимальных рабочих колебаний, обеспечивающих режим бегущей волны, оптимальная форма которых возникает на торце пьезокерамического цилиндра при отношении частот колебаний- продольных к поперечным, равном двум. На торце пьезокерамического цилиндра в местах возбуждения наибольшей амплитуды колебаний жестко закреплено рабочее кольцо 10 на торце фланца 11, закрепленного на конус вала 12, Для центровки вала используется переходное основание 13. Питание пьезовибродвигателя осуществлено через разъем 14. Сигнал о числе оборотов рабочего кольца снимается с датчика оборотов 15. Крайнее положение фары определяется информацией с концевого выключателя 16. Зил. (Л С 00 со VI о ю со
fern
о
р-|
Г
L.
I
V5
L
J
| Способ получения кодеина | 1922 |
|
SU178A1 |
