Изобретение относится к захватшЗ устройствам для пере.;оски грузов вр ную. Известен вакуумный захват, предназначенный для переноски грузов вручную, содержащий камеры азрежения с установленными в них гибкими диафрагмами, перемещаемыми от приво да, выполненного в виде нескольких пар шарнирно соединенных между собой рычагов, и рукоять, соединенную с корпусомкамеры, и рычагами З Недостатком данного захвата является сложность и ненадежность кон струкции из-за большого количества составных элементов. Известен также вакуум-присосный инструмент, содержащий рукоять, сое диненую с эластично вакуумным захватом и обратный клапан 2J . Недостатком известного захвата является ненадежность работы при захвате грузов, имеющих криволинейную или шероховатую поверхность. I Цель,, изобретения - повышение надежности в работе при захвате грузов с неровными поверхностями. Указанная щель достигается тем, что ручной вакуумный захват, содерж щий корпус с рукоятью, камеру разрежения с уплотнительным кольцом и обратный клапан, имеет гибкий упру,гий элемент, установленный Между ко пусом и уплотнительным кольцом с образованием полости, и кольцевую п пружиненную обойму, расположенную внутри полости упругого элемента, причем полость соединена с камерой разрежения посредством пазов в корпусе. На чертеже изображен ручной вакуумный захват. Захват содержит корпус 1, рукоять 2, камеру 3 разрежения, к кррпу су которой прикреплен с помощью кольца 4 гибкий упругий элемент 5, уплотнительное кольцо 6 и обратный клапан 7. Внутри полости 8, образованной гибким упругим элементом 5 и корпусом 1, установлена кольцевая подпружиненная обойма 9 со штырями для пружин 10, упирающихся одним концом в обойму 9, а другим концом в корпус 1. Полост 8 соединена с камерой3 разрежения каналами 11. Обратный клапан 7 захвата имеет подпружиненный рычаг 12, предназначенный для девакуумезации камеры 3 захвата. Захват работает следующим образом При захвате груза нажимают на корпус 1, при этом полый упругий элемент 5 деформируется и воздух из полости 8 через пазы 11 и из камеры 3 разрежения вытесняется через обратный клапан 7 в атмосфе у. При подъеме груза деформированный упругий элемент 5 благодаря силам упругости и действию пружин 10 создает в камере 3 и полости 5 рабочее разряжение, за счет которого удерживается груз. Таким образом, низкий упругий элемент 5 не.только создает разрежение в полостях, но и компенсирует неровности захватываемой поверхности, что позволяет повысить надежность захвата груза. .Гибкая обойма 9 с пружинами 10 позволяет компенсировать неровности захватываемой поверхности груза и одновременно придает поперечную устойчивость уплотнению, так как кольцо б, уплотняющее микронеровности поверхности груза, работает практически только на сжатие.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное захватное устройство | 1977 |
|
SU686967A1 |
| Вакуум присосный-инструмент" а.м.юсупова | 1978 |
|
SU842170A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1970 |
|
SU287269A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ПОРИСТОСТИ ДОРОЖНЫХ ПОКРЫТИЙ | 2019 |
|
RU2728507C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ПОДЪЕМА ГРУЗОВ | 2001 |
|
RU2222489C2 |
| СПОРТИВНО-ОХОТНИЧИЙ ЛУК | 2015 |
|
RU2616772C2 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Устройство для транспортировки сыпучих грузов | 1987 |
|
SU1505861A1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1700150A1 |
| Обратный клапан | 2019 |
|
RU2713933C1 |
РУЧНОЙ ВАКУУМНЫЙ ЗАХВАТ, содержащий корпус с рукоятью, каме.ру разрежения с уплотнительным кольцом и обратный клапан, о т л и ч а ющ и и с я тем, что, с целью повияения надежности в работе при захвате грузов е неровными поверхностями, он имеет гибкий упругий элемент, установленный между корпусом и уплотнительным кольцом с образованием полости, и кольцевую подпружиненную обойму, расположенную внутри полости упругого элемента, причем полость соединена с камерой разрежений посредством пазов в корпусе.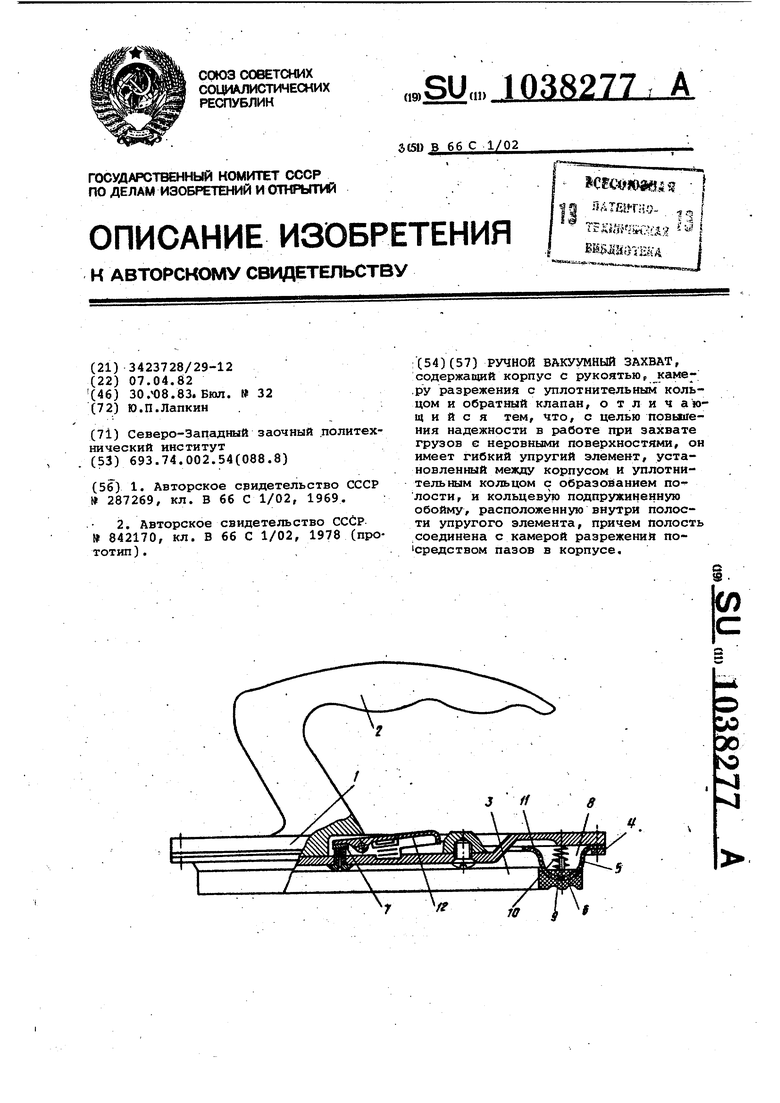
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ВАКУУМНЫЙ ЗАХВАТ | 0 |
|
SU287269A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Вакуум присосный-инструмент" а.м.юсупова | 1978 |
|
SU842170A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| ; | |||
