.1
Известны еакуумяые захваты, оредназначбн,ные для переноски грузов вручную, включающие камеры разрежения с усталовленными в НИХ гибкиЛШ диафрагмами, пе(ремещаемыми от привода, и рукоять, соединенную с корпуса|Ми камер.
Отличие описываемого вакуумного захвата за1КлючаетСя в то,м, что привод перемещения диафрагм выполлея в виде нескольких пар шарнир.но соединенных между -собой рычагов, одни из которых связаны с рукоятью захвата и, через щтоки с диафрагмами, а другие - с планкой, расположенной параллельно рукоятки так, «что при сближении последней iC рукоятью диафрагмы деформируются, создавая разрежение в камерах.
Кроме того, одни из рычагов снабжены роликами, перемещающИ|МИся по планке, и подиружинанными защелками, взаимодействующими с упорами, усгановленными иа рукоятки.
Это повыщает надежность вакуумного захвата в работе и удобство обращения с ним.
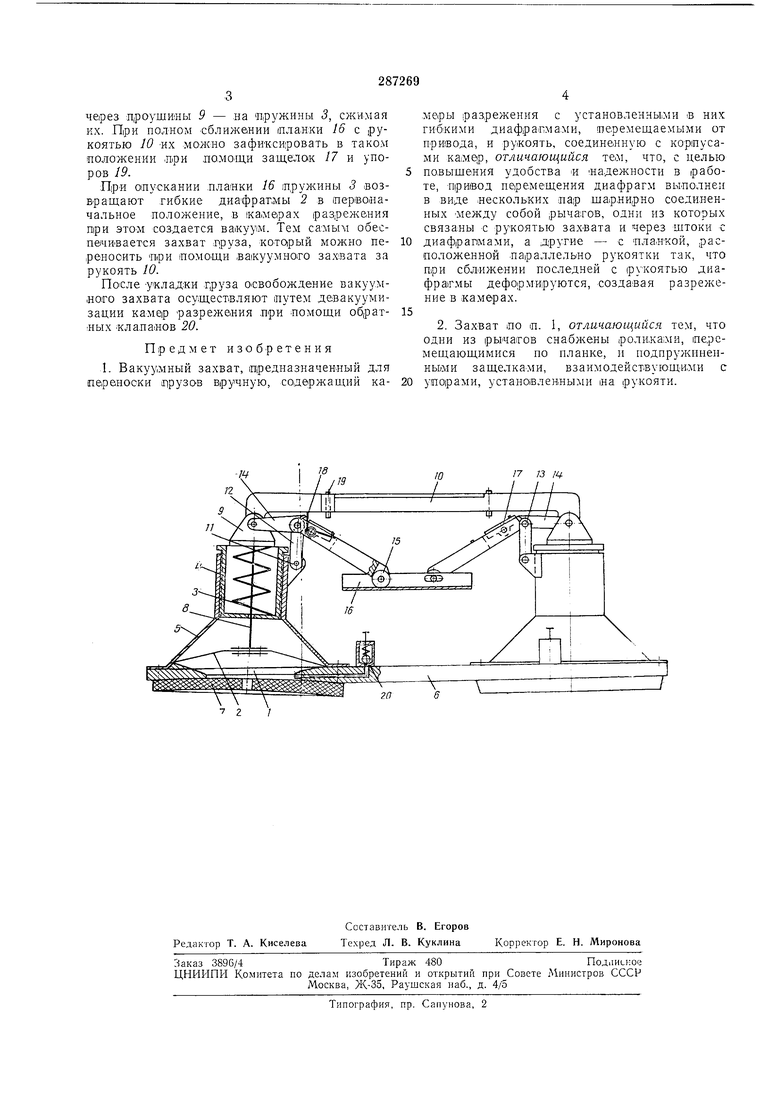
На чертеже показан предлагаемый захват.
Вакуумный захват содержит две ка-меры 1 разрежения, в которых вмоптированы гибкие диафрагмы 2 и пружилы 3 для привода диа|фрагм. Пружины раз1мещены в стаканах 4, установленных в корпусах 5 камер разрежения, которые соединены с плитой 6, образуя с ней единый блок. К плите б прикреплены уплотнения 7, которьши захват накладывается на noBeipxHocTb груза. Диафрагмы 2 СВОИМИ щтока,ми 5 соединены с проущинами 9, которые, в свою очередь, щарнирно соединены с рукоятью- 10.
На корпусах 5 при помощи осей // установлены рычаги 12, на верхних концах которых при помощи осей 13 установлены двуплечие рычаги 14, одни плечи которых щарнирно соединены с рукоятью 10, а другие снабжены ролика1ми 15, перемещающимися по планке 16 при сближении последней с рукоятью.
Двуплечие рычаги 14 снабжены защелками 17, удерживаемыми прулсина:ми 18 и взаимодействующими с упорами 19, смо-нтированными на рукояти 10. Упоры 19 служат для фиксации защелок 17 при сблил ении планки 16 с рукоятью. Камеры разрелсения соединены канала.ми с обратными клапанами 20, установленными на плите 6.
Вакуумный захват работает следующим образом.
Захват уплотнениями 7 устанавливают на груз до плотного прилегания и сжимаютпланку 16 и рукоять 10, приближая ах другк другу. через :цроушины 9 - да пружины 3, сжимая их. Дри полном сближении шла.нки 16 с рукоятью 10 ИХ можно зафиксировать в таком положении лри ,пО:Мощи защелок 17 и упоров 19. При опускании лланки 16 тружины 3 возвращают гибкие диафрагмы 2 в inepiBOinaчальное положение, в калшрах разрежения при этом создается вакуум. Тем самым обеспечивается захват ;Г1руза, который можно переносить При (ПОМОЩИ вакуумного за рукоять 10. По1сле -укладки груза освобождение вакуумного захвата осуществляют путем девакуумизации камер разрежения при помощи обрат;ных клапанов 20. Предмет изобретения 1. Вакуумный захват, предназначенный для переноски Г1рузав вручную, содержащий камеры разрежения с установленными в них гибкими диафрагмами, перемещаемыми от привода, и рукоять, соединенную с корпусами камер, отличающийся тем, что, с целью повышения удобства « надежности в работе, привод перемещения диафрагм выполнен в виде нескольких пар шарнирно соединенных -между собой рычагов, одни из которых связаны с рукоятью захвата и через штоки с диафрагмами, а другие - с пла-нкой, расположенной параллельно рукоятки так, что при сближении последней с рукоятью диафрагмы деформируются, создавая разрежение в камерах. 2. Захват по п. 1, отличающийся тем, что одни из рычагов снабл :ены роликами, перемещающимися по планке, п подпружипепнььми защелками, взаимодействующ-ими с упорами, устанО|Вленными «а рукояти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручной вакуумный захват | 1982 |
|
SU1038277A1 |
| РУЧНОЙ ВАКУУМНЫЙ ЗАХВАТ | 1972 |
|
SU424801A1 |
| Перегрузочное устройство, преимущественно, для поточных линий | 1960 |
|
SU135405A1 |
| УСТРОЙСТВО для СОЕДИНЕНИЯ ТЯГАЧА С ПРИЦЕПОМ | 1973 |
|
SU382528A1 |
| Устройство для захвата изделий | 1980 |
|
SU944945A1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373666A1 |
| Вакуумный захват | 1978 |
|
SU779243A1 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ДНИЩА КОВЩА ЭКСКАВАТОРА | 1971 |
|
SU293104A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1968 |
|
SU219457A1 |
| Устройство управления ковшом грейфера | 1981 |
|
SU994635A1 |
7 2/ /7 3 114
