Изобретение относится к землеройным машинам, в частности к одноковшовым гидравлическим экскаваторам, оснащенным захватами для выполнения погрузочно-раз- грузочных и монтажных работ.
Цель изобретения - повышение производительности и надежности работы двухчелюстного захвата за счет поддержания постоянства усилия сжатия груза,
На фиг.1 изображено рабочее оборудование гидравлического экскаватора вместе с базовой машиной; на фиг,2 - то же, общий вид; на фиг.З - то же, в раскрытом положении; на фиг,4 показан вид по стрелке А на фиг.2; на фиг.5 - узел I на фиг.2; на фиг.б - сечение по А-А на фиг.5; на фиг,7 - гидроцилиндр управления двухчелюстным захватом варианта выполнения рабочего оборудования гидравлического экскаватора.
Рабочее оборудование гидравлического экскаватора состоит из двухчелюстного захвата 1, содержащего корпус 2 с шарнирно присоединенными челюстями. Челюсти включают основания 3 и 4, которые с помощью шарниров 5 укреплены на корпусе 2 и соединены между собой тягами 6. К основаниям 3 и 4 челюстей внутренними шарнирами 7 и 8 присоединены соответственно зубья 9 и Ю. Между основанием 3 и зубом 9, а также между основанием 4 и зубом 10 установлены упругие элементы 11 и 12. При этом основания 3 м 4 с соответствующими
Ч
О
О ««д
сл о
зубьями Ј и 10 связаны дополнительными тягами 13 и 14. Верхние концы дополнительных тяг 13 и 14с помощью соответствующих шарниров 15 м 16 укреплены на основаниях 3 и 4, а их нижние концы снаб- жены продольными прорезями 17 и 18, в которых установлены пальцы 19 и 20, закрепленные жестко на зубьях 9 и 10. Управление двухчелюстным захватом выполнено в виде гидроцилиндра 21, один конец кото- рого соединен с рычагом 22, укрепленным жестко на основании 4, а другой - с рычагом 23, смонтированным жестко на корпусе 2, Конец зуба 10 двухчелюстного захвата выполнен с пазом 24 для захода в него зуба Q. Рабочее оборудование гидравлического экскаватора также включает рукоять 25, стрелу 26, базовую машину 27, гидроцилиндры управления 28,29 и 30.
Гидроцилиндр 21 управления двухче- люстным захватом 1 (фиг.6) имеет сдвоенный поршень, состоящий из поршня 31, укрепленного жестко на штоке 32 гидроцм- линдра 21 с помощью гайки 33, и поршня 34, смонтированного на конце штока 31с воз- можностью осевого перемещения. Подвижное соединение поршня 34 обеспечивается за счет квадратного хвостовика 35 штока 32, взаимодействующего с квадратным отверстием 36 в поршне 34. В осевом направле- нии перемещение поршня 3 4 ограничивается крышкой 37 и шайбой 38. Между поршнями 31 и 34 расположены пружинные элементы, выполненные в виде тарельчатых пружин 39. Поршни 31 и 34 снабжены обратными клапанами 40 и 41 и уплотнительными кольцами 42 и 43.
Зажим груза двухчелюстным захватом 1 осуществляется между зубьями 9 и 10. При этом от действия реакций на зубья 9 и 10 со стороны захватываемого груза происходит деформация упругих элементов 11 и 12. Максимальная величина деформации элементов 11 и 12 ограничивается длинами прорезей 17 и 18 в дополнительных тягах 13 и 14. Сжатое состояние упругих элементов 11 и 12 дает возможность замедлить падение усилия сжатия из-за потерь жидкости в гидроприводе управления двухчелюстным захватом, а также ее практической несжимаемостью.
При использовании рабочего оборудования гидравлического экскаватора с гидро- цилмндром управления двухчелюстным захватом, изображенным на фиг.б, для захвата грузов рабочая жидкость подается в поршневую полость гидроцилиндра 21. После упора зубьев 9 и 10 в захватываемый предмет под действием давления жидкости происходит перемещение поршня 34 и сжатие пружин 39. Сжатое состояние пружин 39
обеспечивает поддержание давления в поршневой полости гидроцилиндра 21 и, следовательно, позволяет увеличить время удержания груза с необходимым усилием захвата, Обратные клапаны 40 и 41 необходимы для выхода жидкости из обьема, ограниченного поршнями 31 и 34. Обратный клапан 41 срабатывает при подаче жидкости в поршневую полость гидроцилиндра 21, а обратный клапан 40- при подаче жидкости в штоковую полость. После подъема груза, манипулирования им и опускания на место поршневая полость подключается к сливной линии гидросистемы и тарельчатые пружины разжимаются, При этом одновременно подается жидкость в штоковую полость, шток втягивается и груз освобождается.
Формула изобретения 1.Рабочее оборудование гидравлического экскаватора, включающее стрелу и шарнирАо присоединенную рукоять с корпусом и двухчелюстным грейферным захва- Том с симметричными чел юстями, установленными шарнирно на корпусе и соединенными между собой тягами, и гидроцилиндры управления рукоятью и поворотом челюстей, отличающееся тем, что, с целью повышения производительности и надежности работы двухчелюстного захвата за счет поддержания постоянства усилия сжатия грузов, челюсти выполнены в виде оснований и зубьев, шарнирно соединенных между собой с зазором, и связаны посредством упругих элементов, причем основания и зубья дополнительно соединены между собо.й посредством дополнительных тяг, верхние концы которых шарнирно присоединены коснованиям, а их нижние концы выполнены с продольными прорезями и посредством пальцев закреплены в зубьях с возможностью продольного перемещения, при этом челюсти своими основаниями шарнирно присоединены к корпусу, а между собой соединены тягами, причем основание одной из челюстей шарнирно соединено с гидроцилиндром управления поворотом, гильза которого шарнирно соединена с корпусом.
2.Оборудование гидравлического экскаватора по п.1,от личающееся тем, что поршень гидроцилиндра управления поворотом челюстей выполнен сдвоенным, одна из частей которого закреплена на штоке неподвижно, а другая - с возможностью про- дольного перемещения, при этом неподвижная и подвижная части связаны посредством пружинных элементов, а каждая часть поршня снабжена обратным клапаном,
11
29 .
Ж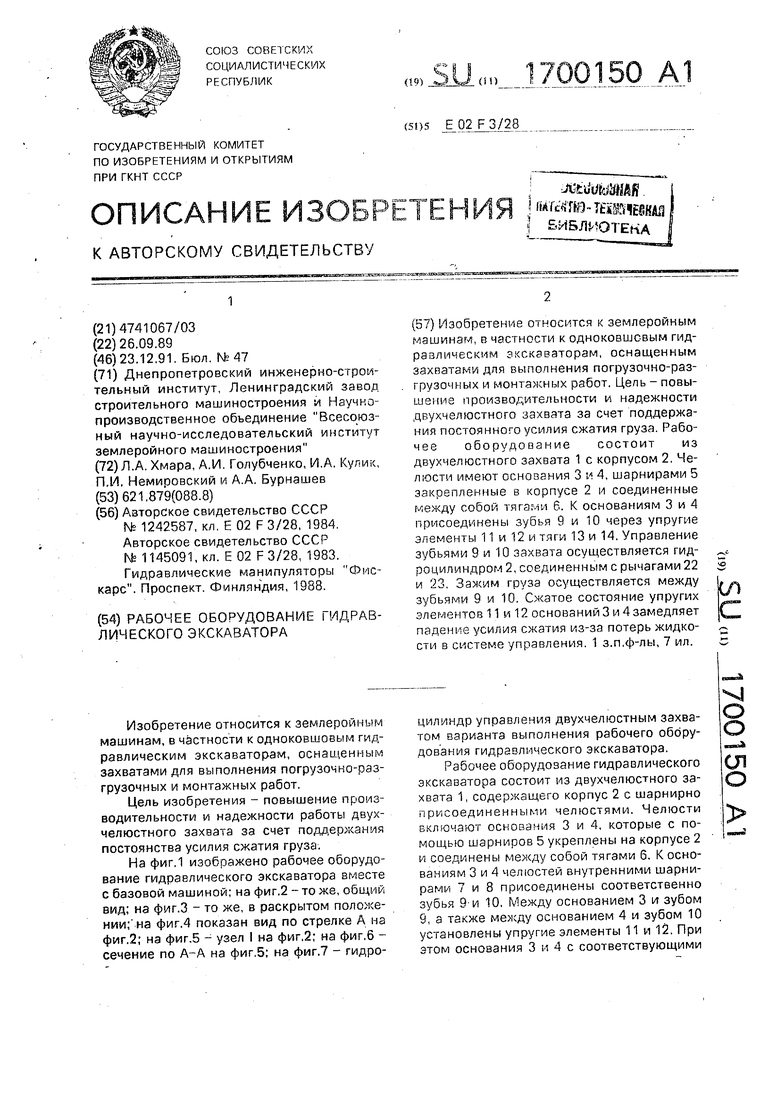

| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование одноковшового гидравлического экскаватора | 1987 |
|
SU1521834A1 |
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1382914A2 |
| Рабочее оборудование гидравлического экскаватора | 1990 |
|
SU1778245A1 |
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1323665A2 |
| Рабочее оборудование экскаватора | 1987 |
|
SU1472587A1 |
| УСТРОЙСТВО ДЛЯ ПОДКОПА ТРУБОПРОВОДОВ | 1992 |
|
RU2054094C1 |
| Навесное оборудование для разборки пыжа | 1983 |
|
SU1144957A1 |
| Рабочее оборудование гидравлического экскаватора | 1989 |
|
SU1694786A1 |
| Упругодемпфирующая подвеска привода ротора экскаватора | 1983 |
|
SU1263755A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |



Изобретение относится к землеройным машинам, в частности к одноковшсвым гид- различескмм экскаваторам, оснащенным захватами для выполнения погрузочно-раз- грузочных и монтажных работ, Цепь - повышение производительности и. надежности двухчелюстного захвата за счет поддержания постоянного усилия сжатия груза Рабочее оборудование состоит из двухчелюстного захвата 1 с корпусом 2. Челюсти имеют основания 3 и 4, шарнирами 5 закрепленные в корпусе 2 и соединенные между собой тягами б. К основаниям 3 и 4 присоединены зубья 9 и 10 через упругие элементы 11 и 12 и тяги 13 и 14. Управление зубьями 9 и 10 захвата осуществляется гидроцилиндром 2, соединенным с рычагами 22 и 23. Зажим груза осуществляется между зубьями 9 и 10. Сжатое состояние упругих элементов 11 и 12 основанийЗи4замедляет падение усилия сжатия из-за потерь жидкости в системе управления. 1 з.п.ф-лы, 7 ил. СП
N ч NJls N S NS%s ч «ч
Фиг. 2
25
10
/
П Ы 38 34 35 39 Л 33 31 4 I/
Г 42 40 47 43
А-А
Фие.6
Фиг. 7
| Рабочее оборудование гидравлического экскаватора | 1984 |
|
SU1242587A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для выполнения земляных и погрузочно-разгрузочных работ | 1983 |
|
SU1145091A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проспект | |||
| Финляндия, 1988. | |||
