2.Пневмогидропривод по п. 1, отличающийся тем, что направляющее устройство выходного звена выполнено в виде стержня, связанного со звеном перемычкой и установленного на корпусе цилиндра с воз можностью осевого перемещения. 3.Пневмогидропривод по п. 1, о т ли чающий ся тем, что устройство безударной остановки выполнено в виде регулируемого дросселя и обратного клапана, установленных параллельно на выходе из электроклапана, управляющего томрозным устройством. 4. Пневмогидропривод по п. 1, отличающийся тем, что подвижная часть датчика положения установлена на штанге.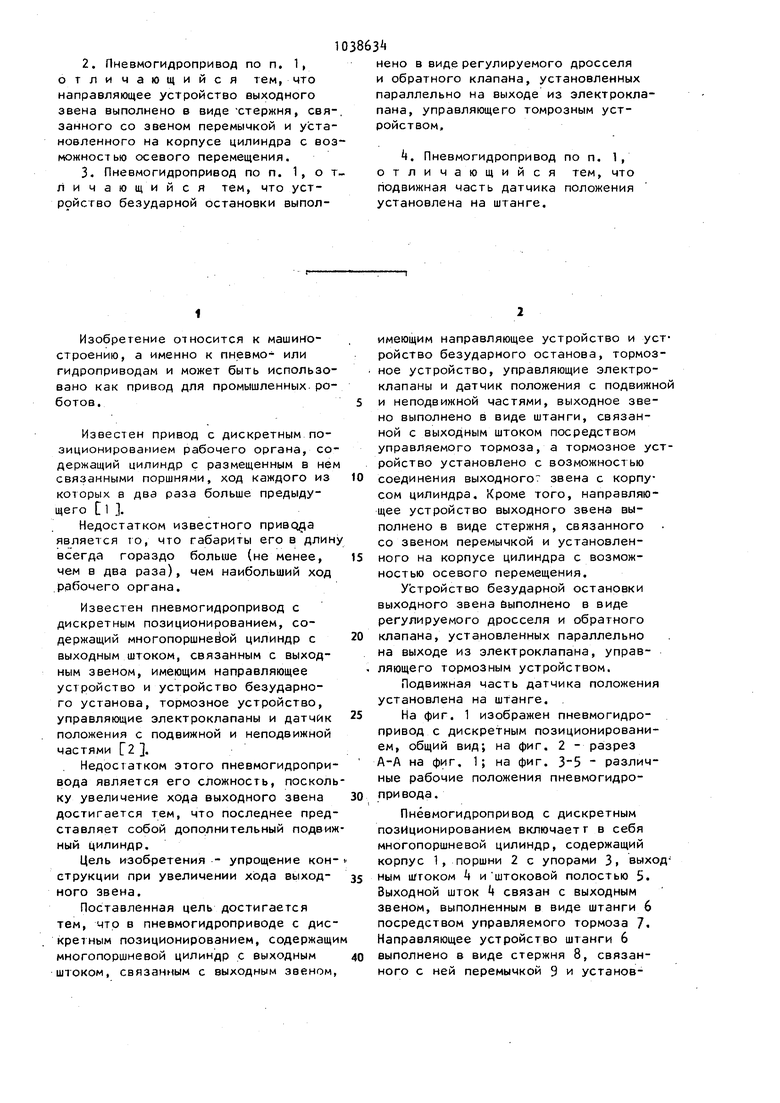
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Подвесной транспортный робот | 1986 |
|
SU1333571A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Позиционный привод | 1986 |
|
SU1328188A1 |
| ИНЕРЦИОННЫЙ ТОРМОЗ ОДНООСНОГО ПРИЦЕПА С УСТРОЙСТВОМ СТАБИЛИЗАЦИИ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ | 2024 |
|
RU2829583C1 |
| Позиционный пневматический привод | 1988 |
|
SU1508015A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Устройство для монтажа радиодеталей на печатную плату | 1985 |
|
SU1412027A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Промышленный робот с дискретным позиционированием | 1978 |
|
SU768631A1 |
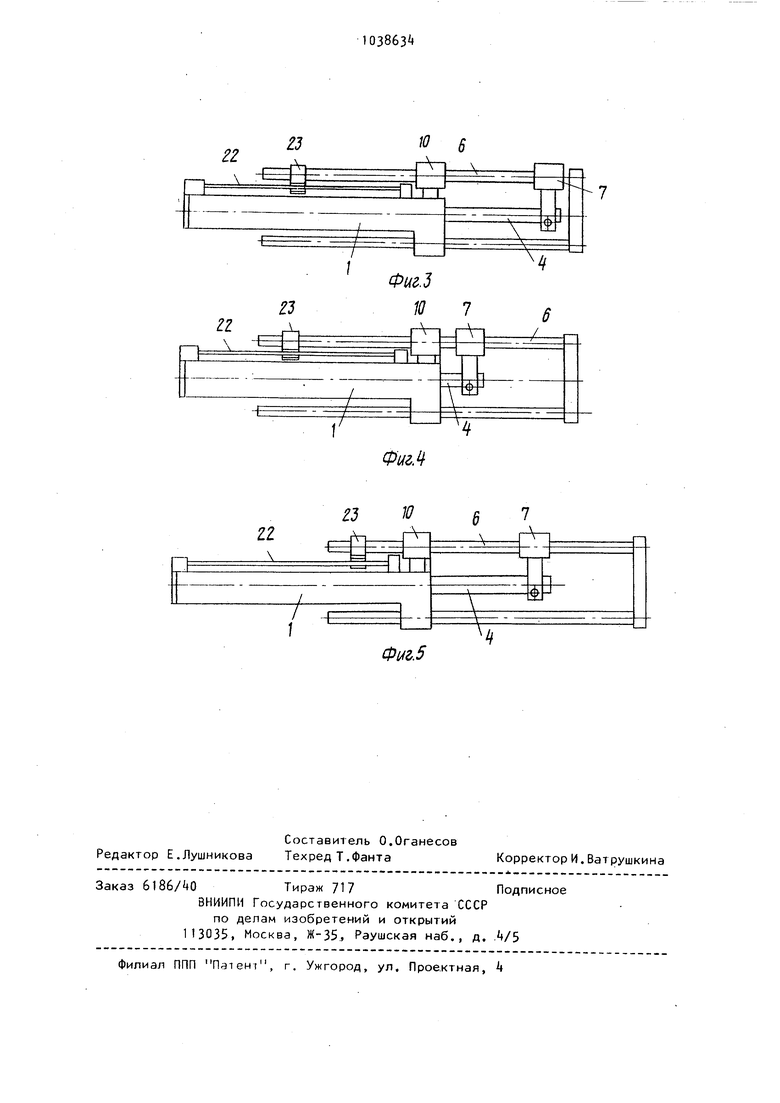
1. ПНЕВМОГИДРОПРИВОД С ДИСКРЕТНЫМ ПОЗИЦИОНИРОВАНИЕМ, содержащий многопоршневой цилиндр с выходным штоком, связанным с выходным звегз гг г ном, имеющим направляющее устройство и устройство безударной остановки, тормозное устройство, управляю щие электроклапаны и датчик положения с подвижной и неподвижной частями, отличающийся тем, что, с целью упрощения конструкции при увеличении хода выходного звена, последнее выполнено в виде штанги, связанной с выходным штоком посредством управляемого тормоза, а тормозное устройство выполнено с возг можностью соединения выходного звена с корпусом цилиндра. (О г/ со 00 Од оо 4
Изобретение относится к машиностроению, а именно к пневмо- или гидроприводам и может быть использовано как привод для промышленных.роботов.
Известен привод с дискретным позиционированием рабочего органа, содержащий цилиндр с размещенным в нем связанными поршнями, ход каждого из которых в два раза больше предыдущего tl .
Недостатком известного привс ра является то, что габариты его в длин всегда гораздо больше (не менее, чем в два раза), чем наибольший ход рабочего органа.
Известен Пневмогидропривод с дискретным позиционированием, содержащий многопоршнейой цилиндр с выходным штоком, связанным с выходным звеном, имеющим направляющее устройство и устройство безударного установа, тормозное устройство, управляющие электроклапаны и датчик положения с подвижной и неподвижной частями Г2 .
Недостатком этого пневмогидропривода является его сложность, поскольку увеличение хода выходного звена достигается тем, что последнее представляет собой дополнительный подвижный цилиндр.
Цель изобретения - упрощение конструкции при увеличении хода выходнего звена.
Поставленная цель достигается тем, что в пневмогидроприводе с дискретным позиционированием, содержащи многопоршневой цилиндр с выходным штоком, связанным с выходным звеном,
имеющим направляющее устройство и усройство безударного останова, тормозное устройство, управляющие электроклапаны и датчик положения с подвижн и неподвижной частями, выходное звено выполнено в виде штанги, связанной с выходным штоком посредством управляемого тормоза, а тормозное усройство установлено с возможностью соединения выходного звена с корпусом цилиндра. Кроме того, направляющее устройство выходного звена выполнено в виде стержня, связанного со звеном перемычкой и установленного на корпусе цилиндра с возможностью осевого перемещения.
Устройство безударной остановки выходного звена Выполнено в виде регулируемого дросселя и обратного клапана, установленных параллельно на выходе из электроклапана, управляющего тормозным устройством.
Подвижная часть датчика положения установлена на шТанге, .
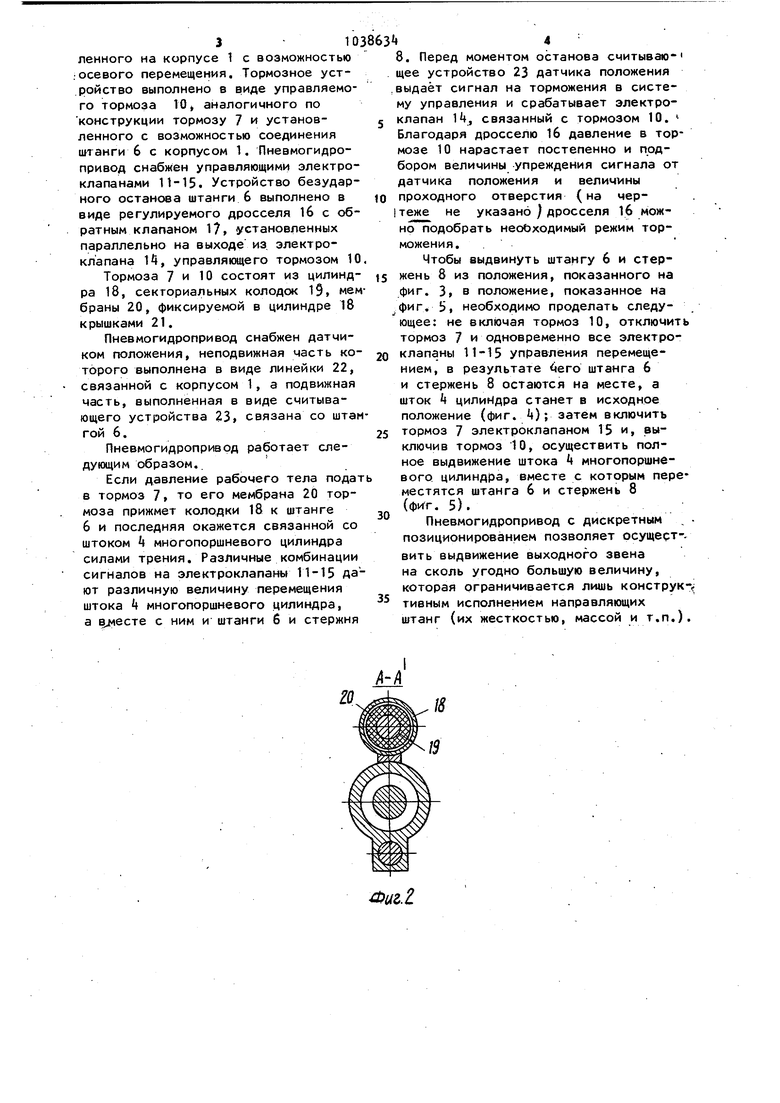
На фиг. 1 изображен Пневмогидропривод с дискретным позиционированием, общий вид; на фиг, 2 - разрез А-А на фиг. 1; на фиг. различные рабочие положения пневмогидропривода.
Пневмогидропривод с дискретным позиционированием включает т в себя многопоршневой цилиндр, содержащий корпус 1, поршни 2 с упорами 3, выхо ным ufтоком k иштоковой полостью 5. Выходной шток 4 связан с выходным звеном, выполненным в виде штанги 6 посредством управляемого тормоза 7. Направляющее устройство штанги 6 выполнено в виде стержня 8, связанного с ней перемычкой 9 и установленного на корпусе 1 с возможностью .осевого перемещения. Тормозное устройство выполнено в виде управляемого тормоза 10 аналогичного по конструкции тормозу 7 и установленного с возможностью соединения штанги 6 с корпусом 1. Пневмогидропривод снабжен управляющими электроклапанами 11-15. Устройство безударного останова штанги 6 выполнено в виде регулируемого дросселя 16 с обратным клапаном 17, установленных параллельно на выходе из электроклапана 14, управляющего тормозом 10
Тормоза 7 и 10 состоят из цилиндра 18, секториальных колодок 19, мембраны 20, фиксируемой в цилиндре 18 крышками 21.
Пневмогидропривод снабжен датчиком положения, неподвижная часть которого выполнена в виде линейки 22, связанной с корпусом 1, а подвижная часть, выполненная в виде считыва ющего устройства 23, связана со штамгой 6.
Пневмогидропривод работает следующим образом..
Если давление рабочего тела подат в тормоз 7, то его мембрана 20 тормоза прижмет колодки 18 к штанге 6 и последняя окажется связанной со штоком Ц многопоршневого цилиндра силами трения. Различные комбинации сигналов на электроклапаны 11-15 дают различную величину перемещения штока k многопоршневого цилиндра, а BjMecTe с ним и штанги 6 и стержня
,выдаёт сигнал на торможения в систему управления и срабатывает электроклапан , связанный с тормозом 10. Благодаря дросселю 16 давление в тормозе 10 нарастает постепенно и подбором величины упреждения сигнала от датчика положения и величины проходного отверстия (на черIтеже не указано ) дросселя 1б можно подобрать необходимый режим торможения. .
Чтобы выдвинуть штангу 6 и стер жень 8 из положения, показанного на фиг. 3, в положение, показанное на
.фиг. 5, необходимо проделать следующее: не включая тормоз 10, отключит тормоз 7 и одновременно все эпектроклапаны 11-15 управления перемещением, в результате его штанга 6 и стержень В остаются на месте, а шток t цилиИдра станет в исходное положение (фиг. Ц); затем включить тормоз 7 электроклапаном 15 и, выключив тормоз 10, осуществить полное выдвижение штока k многопоршневого цилиндра, вместе с которым переместятся штанга 6 и стержень 8 (фиТ. 5).
Пневмогидропривод с дискретным , позиционированием позволяет осуществить выдвижение выходного звена на сколь угодно большую величину, которая ограничивается лишь конструк тивным исполнением направляющих штанг (их жесткостью, массой и т.п.)
иг.
/J
0 6
Фи&.5
