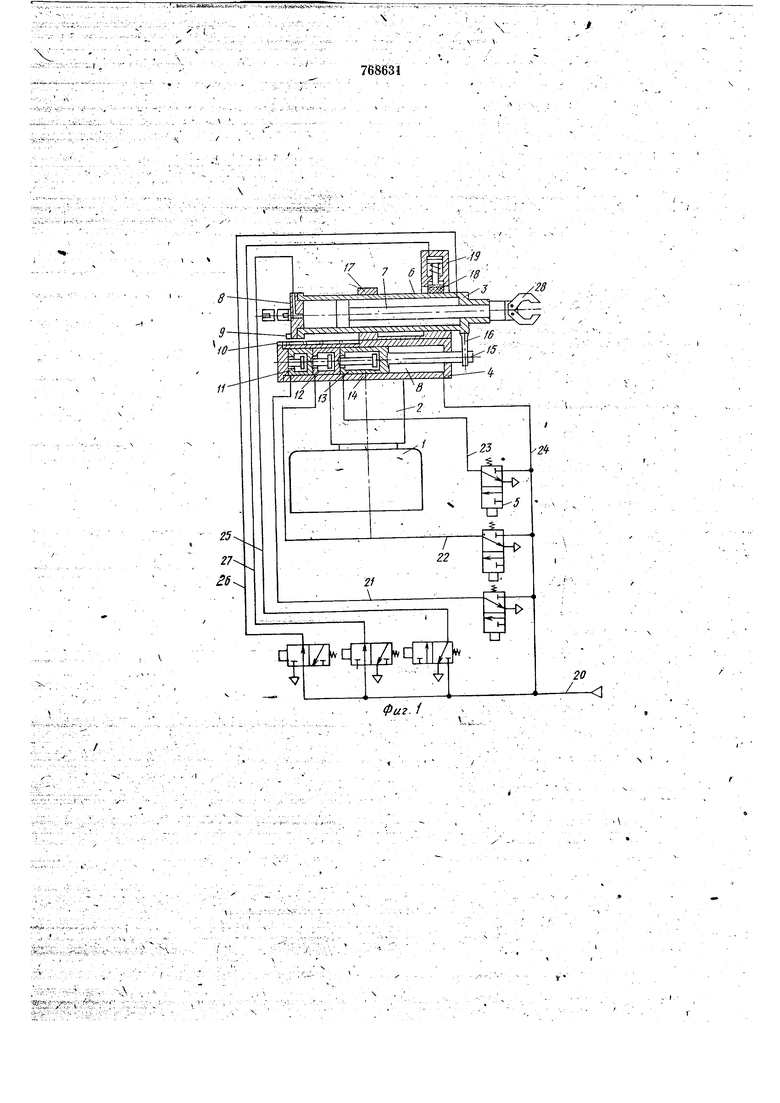
ваго дополнительного цилиндра 4 |и расПредеЛгИтелей 5. ,, ,/ - : / Основной цилиндр 3 со.стоитйз Корпуса б и штока 7. К задней крышке S прикреп-. лен флажок 9 для взаимодействия с лутевы( .выключ-аталетми 10, вьшолиенньими в 1видё отдельного -блока. Многопоршлавой дополнительный цилиндр 4 состоит из поршней 11-13 и корпуса /. Поршень 13, шеет штоковую часть 1/5. Палец 16, приКрепленньтй к корпусу 6 основного цилиндра 5, входит в поперечный паз штс ковой части 15 13. -Палец 16 выполнен цилиндрическим с диам етром, равным -шлрйне паза, что позволяет комленбиравать при перемещениях «еточиость установки oOHOsHoro щилиядра бтносительно дополнйтельно.го цилиндра 4. Основной- цилиндр 3 установлен в направляющих 17, прикреп: ленных -к :корпусу iM цилиндра 4. Для торм Жвния корпуса 5 служит торм-оз-ная колодка .18 ,и лривод тормозл ,/Р. Шланг2 подводят воздух к распределителЯМ 5. Шланги 21-23 служат для подвода воздуха соответственно под .поршни , ,, а 24 - для П0|двода В10здуха.к кор: .чтуту 14 и возврату-тем самым .поршней //-13 в «сходное по-ложение. Шлаиги 25 и 26 служат для подвода .воздуха к основному ЦЕДиндру , а шланг 27 - к приводу тормоза 19., . ,,К штоку 7 прикреплен схват 28. Раснредел-ители 5 установлены на яодъемно-поворотной стойке 2, основной пнеЪмОцилиндр . 3 со штангой 29 соединен поперечиной 30 со штоком 7. На штанге 2Р.закреплены упоры 31, .которые служат дл;я взаимодействия с демпфером 32. Штавга 29 установлена с возможйостью перемеЩвняя в «аи-равляющей 33. Прамышленный робот работает следующим образом.; ., леремеЩ|ен ия сх1вата 28 IB заданную точку переклю-чают ;соответствую1щее количество 1распредели.телей, 5. При этом во.зможны три варианта: . . .. .:. -- ход схвата меньше или равен ходу миогопоршневого дополнительного цилиндра;- ,;. . . ; .. V -х. - ход схвата -paiBen ходу оонов,ног10 цилиндра; - - -; -- ; - х-од ..схвата больЦ е, ч-ем. ход -OCH-OEHQло аднлиНдра. . I-.-- N--.:-;л..:. :При nepiBOM варианте сжатый воздух подается к .одному из поршней и.ли ОЩноврбМенно к группе IB заданном сочета1НИИ., отключается привод то|рм-оза-/Р ;йрастормаживается iKop.nyc 6 пневмйщй.линдра 3. |Вви.ду того, что площадь поршней ,//- / слева больше, ч-ем площадь поршня 13 справа, последний вьщавлива ет воздух; из полости В и таеремётиается впра1во. BinpaBiO -перемещается также ин1евмоцил|ВН др «, так как о« связан со штоком 15 пальцем 16. Если ход схвата больше шата между утевьгми 1В|)1клк)чатёлями ,10, то система рограммною управления подготавливает еобходимый, путёвой выключатель 10. JTlocе воздействия на него 9 включаетя привод тормоза 19, происходит торможеие и дальнейшее перемещение пневмоцииндра 3 до заданной. точк1и остановки на едленной скорости. Это позволяет избежать перебег или удара при позиционировании. Если же ходмеиьше тата, толосле р асто рм,аЖ|И|ван-ия реле времени включает пря- BiOfl TOpiMoea,79.-. При втором варианте, жогда ход схвата должен /быть равным ходу ооновного ци-.. линдра 3, срабатывают, только раслределители, лодающие воздух в шланги 25 |И 26. Штож 7 П1ере1мещается, обеопечивая лозицион1Ирова1Н|И|е. Торможение штока 7 в ХОда проийодится за счет взаимодействияштока через поперечину 30, штангу 25. я упор 3.1 с демйферам 32. При Т)ретье1м. варианте, когда ход сявата 28 больше хода осиовлото :Ц1ил.И1ндра 3, работают одновре)менно Оба Л1нввмоц1ил1инд-ра 3 ,н 4, причем действуют они таж, как опи.сано в первОМ ;и втором -вариантах. Введение путевых выключателей 10, тормозного устройства 18 и 19 и демифера 33 позволяет получить 1высокую среднюю скорость леремещения схвата 28 и, сл1р до1вателыно, .лавьюйть 1Пр0|ИЗВ10дительность . -робота. . Другим положительным моментом введения тармоз:ното устройства ;явлйяетсй повыше.ние /точности поз/иадио1нир.01ва,мия .за счетвыбора тормоз.ом зазоров,- имеюшихся между направляющими J7 и .корпусом 6 ocHOB.HO.no Цилиндра, в одном и том .же яаправл.ен1ии. -. - .. Конструкция промьтшлениаго .робота .с дискретным позициоиврованием позволяет сокра-иить длину плеча робота вдоль оси, 1не снижая хода плеча. Что сокращает объем производственной площади, где Должен будет футжциО|НМровать-робот. - Кроме TiQrO, увеличивается быстродействие робота и, следовательно, увеличивается его рроивводительность. -,. . . .Конструкция /плеча, состоящая из модулей OiCHOBHoro .и многопоршневого допо.днйтельрого цилиндров, позволяет использовать эти Ылздндры порозн.ь te .качестве самострятельных фунюциоиальных э.леменгов рОбота. (Первый мойуль - мно опор шневой до-полянтедйный ци-линдр с д йскретным позиционированием и ходом Lj .2 2, ВТО. рой м.одуль - основно-й тневмошляндр с .ходам 1-2 -2, где ./ - целое пол о-жительное число. Изменяющееся от О до «. Следова-тельно, имеется в-озмо-ж1но;сть к-01мпо«овК)И роботов., .с трвм1Я-вариантами плеча, а именно: первый ва1)иант 7основвой + iMHorono.pfflHeiBOH дополвительный цилиндры, ход -L LI + Ьз) при необходимости получения аначительлото хода схвата робота ,с Промежуточиьгм лозицвоБироваиием; второй вариант (|мн6гопоршневой даполяительный дилиндр) при необходи-/ijio cTH обеспечения пр,амежуточ;ного...поаициойировандя и оравиителыно небольшого хода схвата; трений вариант (основной цил1И Ндр) йри рНботе по двум упорам. При STOM соответственно уменьшается стоимость .каждойго Последующего вариа1нта. , .
йзобретени..я
1. ПромышлеиБЫй робот сДискретным розиащонирова ниам, сод ержащий лривод Л|Ин. перемещерия, вьшолиевный в 1виде основного ,и мщагопоршневого дополни трльноло силовых рвЛКЩЦров, корпусы которых расположены на подъемиб-поворогной iCTOUKe, распределители, систему программного управления устройства демифйроваиия и торМосжения, отлячающийс я тем, что, с целью йойыщвйия экоплуатацианиых качеств путем 1йОкраще Н|Ия габаритов робота, улу1чшвния дийамичеоких хара1ктер с:ти)к и обеспечен|ИЯ модульного -исполнения, иополиительный .цилиндр распоЛ.01Ж9Н параллелкво осношюму цилиндру, корпус которого соед1Ийен со штоком дополнательного цилиндра я установлен с воз можиостью пер-емещения по последнему причем соотношение ходов поршней основного и дополнительного ;цил,И1НДров При.их наи-больще.мперемещенй.|1 кратно двум.
2.Робот до п. 1, отличающийся TiSM, что корпус ocHOBHioro.цилиндра связан со штоком дополентельноЗпо щилиндра поводком, закрепленнымна .одном ,из иих, и
0 опветньтм пазом, выполненным «а другом.
3.JPo6oT (ПО п. -1, о тл ич а ю п;и йс я тем, ч устройство то можёния 1выпол Нб,нр в |виде , закрепленного яа корпусе бсновного цилиндра, и путевых выключате5лей, установленных на корпусе дополнитрльнотоцил.индра. , ,
4.Ро)бот по п. 1, от ЛИчающийся тем:, что устройство- 111.вмпф;и;ров.а1ния основного цилиндра выполнено в виде демпфера и щтанги с упорамиС установленной на штоже цилиндра, пр-ичем сам демпфер закреплен на корпусе цил1И)ни.ра.
5.Робот по пп. 1-4, отлич а ю щи иС я тем, что расп|редел1итеЬй расположены
5
на Подъемно-поворотной стойке и соединены с,системой ПрограММного управления.
Источник информащии,
принятый во (внимание при экспертиэе;
3
1. Авторское свидетельство ССОР № 503712, кл, В 25 J 9/00, il974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот с дискретным позиционированием | 1980 |
|
SU887155A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Устройство для гибки обечаек из листовых заготовок | 1982 |
|
SU1074622A2 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| Устройство для подачи заготовок | 1985 |
|
SU1296368A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Устройство для перемещения заготовок | 1986 |
|
SU1400732A1 |