I
Изобретение относится к станкостроению.
Известен промышленный робот, содержащий многозвенную механическую руку с подвижными звеньями, кистевой узел со схватом, приводы перемещений, выполненные в виде силовых цилиндров, кинематически связанных с соответствующими звеньями и с тормозными устройствами по крайней мере одного из звеньев механической руки lj.
Недостатком известного робота является малое число точек позиционирования механической руки, что снижает технологические возможности робота.
Цель изобретения - расширение технологических возможностей робота путем.увеличения точек позиционирования руки..
Цель достигается тем, что каждое тормозное устройство содержит штангу, фиксирующий тормоз, упорные пластины и демпферы, причем упорные пластины расположены на штанге напротив демпферов, штанга установлена с возможностью поступательного перемещения параллельно продольной оси звена механической руки, а фиксирующий тормоз установлен с возможностью продольного перемещения относительно штанги, при .этом демпфер тормозного устройства выполнен в виде гидравлического амортизатора.
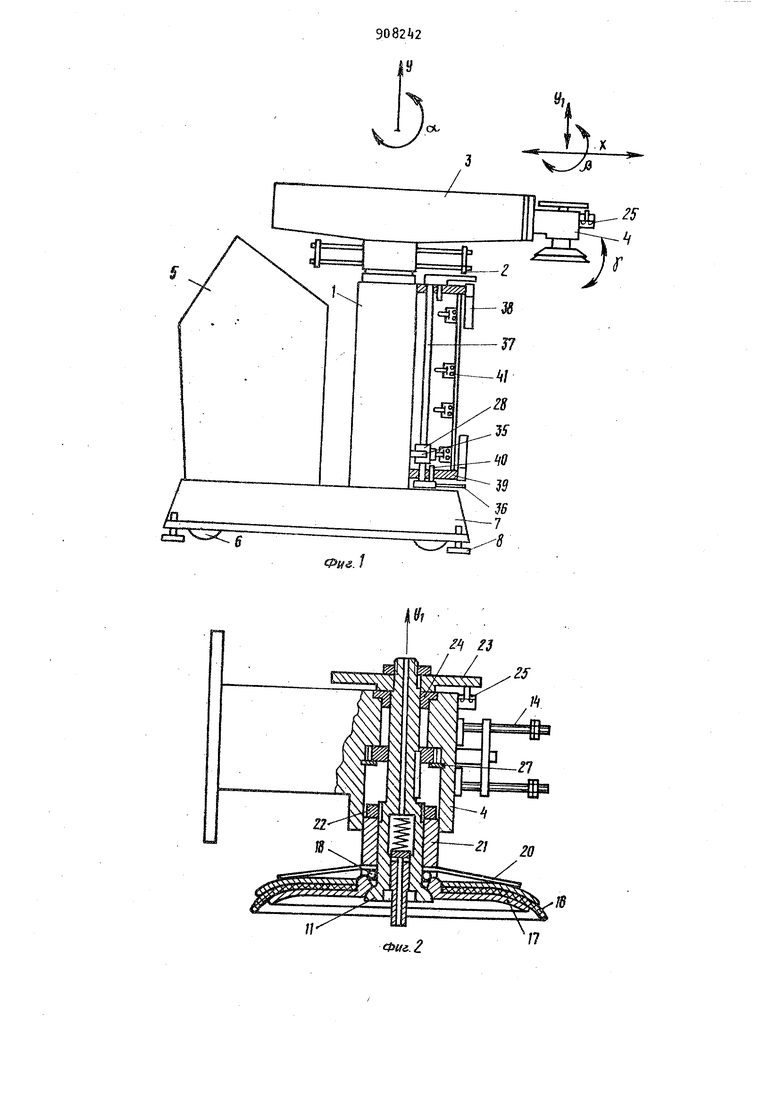
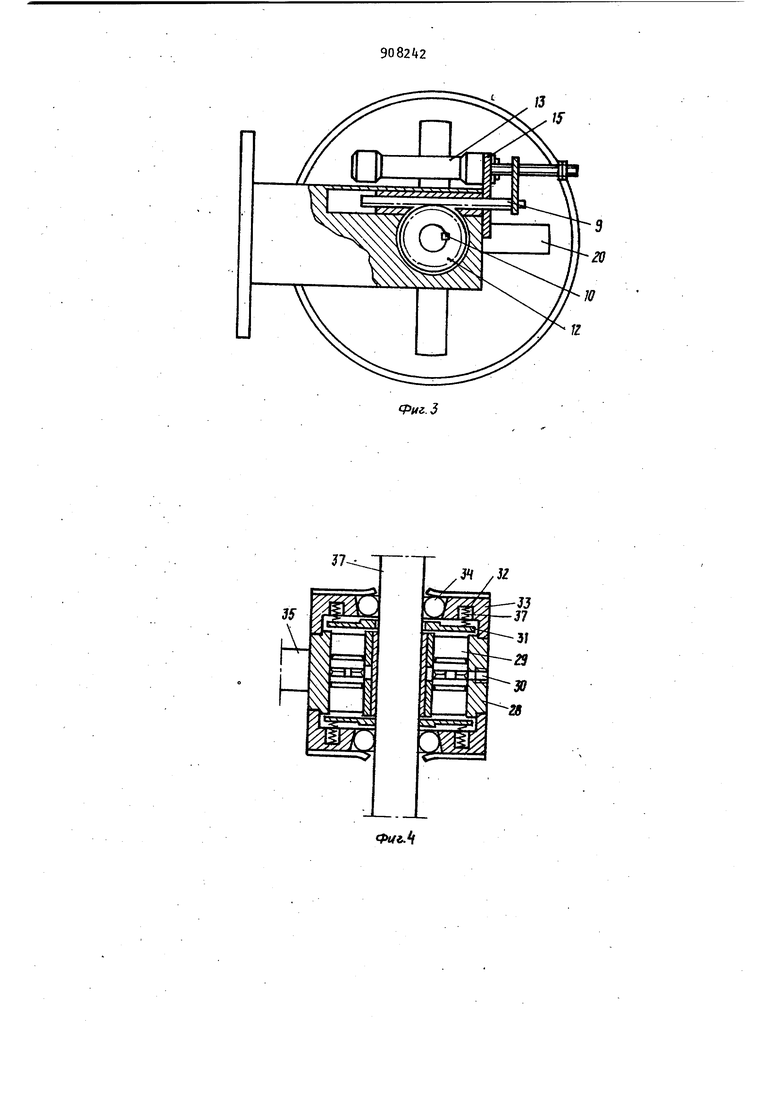
На фиг. 1 изображена принципиаль-. ная схема промышленного робота, разрез; на фиг. 2 - примерное исполнение грейферной головки на фиг,1,
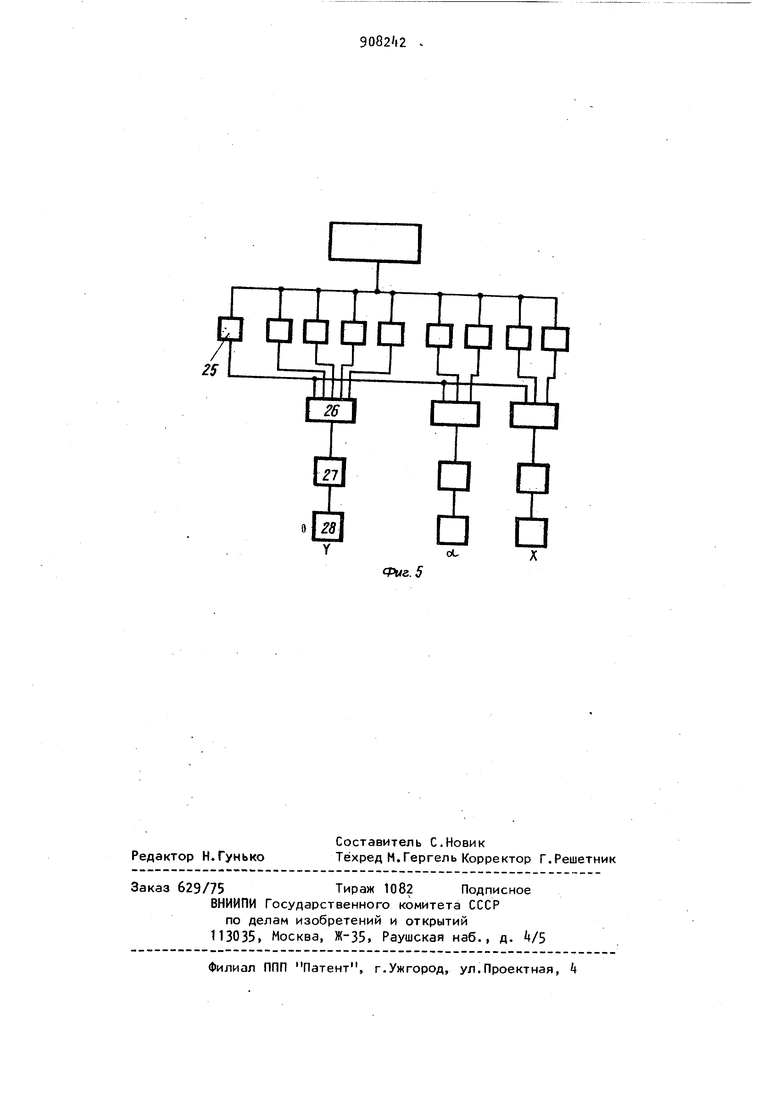
15 вид сбоку; на фиг. 3 - грейферная головка на фиг. 2, вид сверху, разрез;на фиг. /4 - фиксирующий тормоз, разрез; на фиг. 5 - схема управления фиксирующими тормозами.
50 Промышленный робот (манипулятор) .состоит в основном из приводных блоков 1, 2 и 3. образующих зёенья механической руки, и исполнительного органа в виде грейферной головки k. а также из блока 5 управления. Эти части расположены на снабженной колесами 6 райе 7i которая может быть перемещена к любому месту и там зак реплена на установочных ножках 8. Изображенный в качестве примера промышленный робот (манипулятор) работает в цилиндрической системе координат. Его главные перемещения по координатам У и X и поворот на угол «si осуществляются каждое от отдельного привода. Грейферная головка 4 далее позволяет производить определенные вспомогательные перемещения по координате. и повороты на углы и У. Вертикальные движения в направлении координаты У производят ся силовыми цилинд|эами, например пневматическим цилиндром, расположен ным в приводном блоке 1. Поворот головки на угол X производится блоком 2, который состоит из двух пневматических цилиндров одинарного действия, располом{енных в общем кожухе, ро штоками, выполненными в виде зубчатых реек, из зубчатки, роликовых подшипников и еще одной зубчатой рей ки в качестве упора. На приводном блоке 2 жестко привернут болтами третий приводной блок 3 так, омто он поворачивается приводным блоком 2. Для выполнения движения грейферной головки k в горизонтальном направлении служат также пневматический рабочий цилиндр приводного блока 3Грейферная головка Ц, которая служит для захватывания и удерживания перено симых предметов, сама имеет три дополнительные степени свободы, т.е. возможности перемещения, а именно, вращение относительно вертикальной оси на угол ft, вертикальное движение подачи по координате У , а также несколько ограниченное угловое перемещение на уголЗ. Указанные степени свободы могут осуществляться посредством находящегося в зацеплении с зубчатой рейкой 9 зубчатого колеса 10 опирающегося на опорное кольцо и скрепленного с полым валом 11 с помо щью скользяще шпонки 12 и пневматического цилиндра 13 со штоком 1, который воздействует на зубчато-рееч ный механизм через бугель 15- Грейфе ная головка содержит находящуюся внутри резинового колокола 1б тарелку 17. опирающуюся через муфту 18 ня пластинчатую пружину 20 и затем 2 на вал 11, находящейся в ползуне 21 с упором 22, причем вал 11 имеет выступ с шаровой поверхностью. Управляющий диск 23 и втулка 2Ц расположены на полом валу 11. На головке расположен датчик 25, связанный с блоком 26 логической схемы ИЛИ, далее с усилителем 27, включающий фиксирующий тормоз 28. Тормоз выполнен в виде пневмоцилиндра. В его конструкции рабочие полости 29 поршня связаны через штуцер 30 с источником сжатого воздуха (на фиг. не показ ан) . Имеются опорные кольца 31, нажимные пружины 32, зажимные кольца 33. ролики 3. Рычаг 35 тормоза связан с приводным блоком 1. Упорная пластина 36 закреплена на конце штанги 37 и упирается в гидравлический демп-Ф Р 38 тормозного устройства. Кроме того, на блоке 1 закреплена пластина 39 и удерживается там посредством позиционирующего болта 0. Работа промышленного робота осуществляется следующим образом. Головка k подается вниз. При этом резиновый колокол 16 достигает предмета. Управляющий диск 23 с помощью втулки 2 приподнимается на валу 11, срабатывает датчик 25. Сигнал от этого датчика через блок 26 и усилитель 27 включает фиксирующий тормоз 28. Его рабочие полости 29 освобождаются от сжатого воздуха. При этом опорные кольца 31 под действием нажимных пружин 32 зажимаются между штангой 37 и коническими внутренними поверхностями зажимных колец 33 В результате штанга 37 оказывается жестко связанной с тормозом 28 И через рычаг 35 с приводным блоком1. Упорная пластина Зб, закрепленная на конце штанги 37, воздействует на демпфер 38, который поглащает часть кинетической энергии, после чего вся система упирается в пластину 39 . Зажимающее усилие в фиксирующем тормозе 28 может быть снято за счет того, что под действием подаваемого через штуцер 30 сжатого воздуха ролики 3 выходят из конических зазоров между тормозной штангой 37 и зажимными кольцами 33Фиксирующий тормоз 28 может аналогичным образом сработать также и от сигнала какого-нибудь другого датчика, например датчика 41, укрепленного неподвижно вдоль траектории движения и/или переставляемого по программе, или также по сигналам со внешних датчиков сигнала любого типа. В случае нескольких отдновременно движущихся приводных блоков, если они должны быть остановлены одновременно, фактически движущиеся, т.е. как раз в этот момент управляемые блоки определяются с помощью логического блока, и этот блок дает команду на остановку на соответствую щие фиксирующие тормоза двигающихся приводных блоков за счет того, что датчики k через логические схемы ИЛ блока 2б и усилители 27 запитывают фиксирующие тормоза 28. Промышленный робот обеспечивает увеличение числа точек позиционирования механической руки, что позволит расширить его технологические возможности. , Формула изобретения 1. Промышленный робот, содержащий многозвенную механическую руку с под вижными звеньями, кистевой узел со схватом, приводы перемещении, выпол-ненные в виде силовых цилиндров, кинематически связанных с соответствующими звеньями и с тормозными устройствами по крайней мере одного из звеньев механической руки, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения точек позиционирования руки, каждое тормозное устройство содержит штангу, фиксирующий тормоз, упорные пластины и демпферы, причем упорные пластины расположены на штанге напротив демпферов, штанга установлена с возможностью поступательного, перемещения параллельно продольной оси звена механической, ру.ки, а фиксирующий тормоз установлен с возможностью продольного перемещения относительно штанги. 2. Робот по п. 1,отличающ и и с я тем, что демпфер Topijiosного устройства выполнен в виде гидравлического амортизатора. Источники информации, принятые во внимание при экспертизе 1. Пособие по применению промышленных роботов. Под ред. Кацухико Кода. М., Мир, 1975, с.288-289. Фмг. / vjy Jk- 
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1991 |
|
SU1776556A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| Приводное устройство для вращения захвата руки промышленного робота относительно взаимно-перпендикулярных осей и движения губок захвата | 1980 |
|
SU919865A2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Рука промышленного робота | 1982 |
|
SU1096095A1 |
| Устройство для позиционированияРАбОчЕгО ОРгАНА | 1975 |
|
SU820651A3 |
| РУКА РОБОТА | 2003 |
|
RU2247650C2 |
| Резонансный привод промышленного робота | 1987 |
|
SU1570892A1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
25
Ц
.2
3735
/J
If
