C7t
о
00
о ел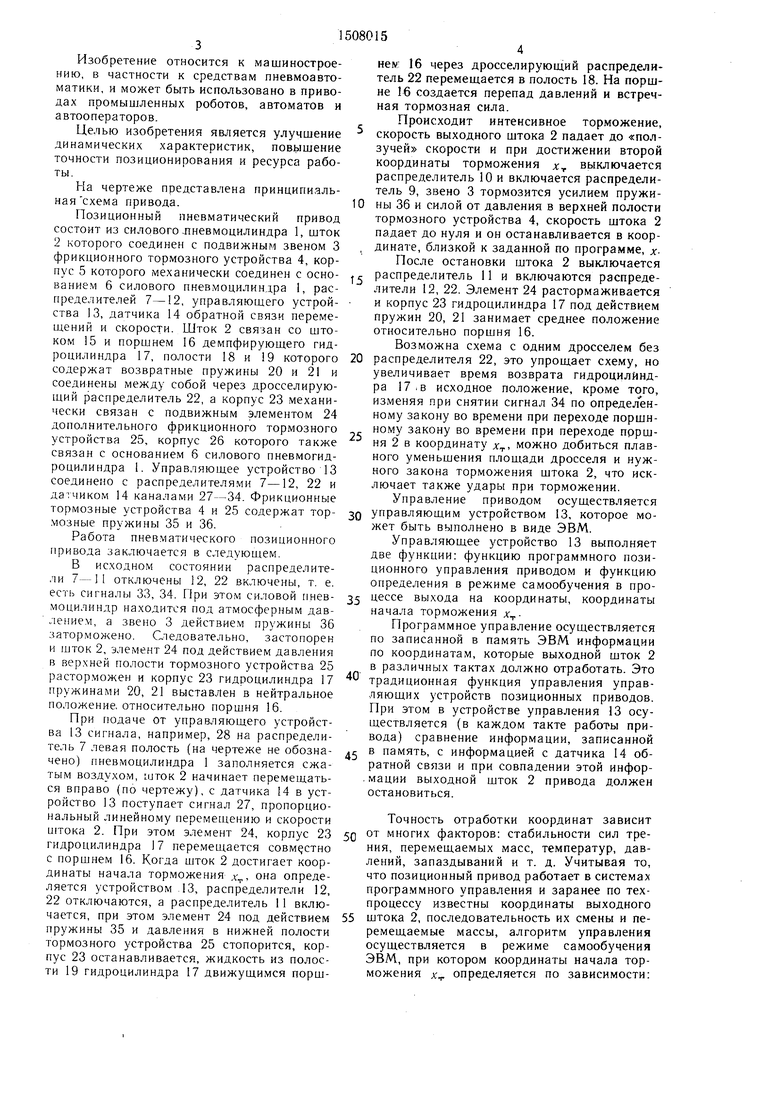

| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 1992 |
|
RU2041405C1 |
| Цифровой пневмогидравлический привод | 1980 |
|
SU920275A1 |
| Цифровой пневмогидравлический привод | 1980 |
|
SU1019118A1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Устройство для адаптивного управленияпОзициОННыМ элЕКТРОпРиВОдОМ | 1978 |
|
SU798708A1 |
| Пневмогидравлический цифровой позиционный привод | 1981 |
|
SU1021827A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Позиционный пневматический привод | 1988 |
|
SU1536090A1 |
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
Изобретение предназначено для использования в технологическом оборудовании. Цель изобретения - улучшение динамических характеристик, повышение точности позиционирования и ресурса работы. Позиционный пневматический привод содержит силовой пневмоцилиндр 1, установленный на основании 6, демпфирующий гидроцилиндр 17, шток 15 которого жестко связан со штоком 2 пневмоцилиндра 1, а полости 18, 19 сообщены через дросселирующий распределитель 22, фрикционные тормозные устройства 4, 25, размещенные на основании 6 с возможностью взаимодействия соответственно со штоком 2 и корпусом 23 гидроцилиндра 17, и управляющее устройство 13, которое может быть выполнено в виде ЭВМ.Изобретение позволяет снизить ударные нагрузки и получить высокую точность позиционирования, поскольку окончательное торможение и выход на координату осуществляется тормозным устройством 4 с "ползучей" скорости, а не с рабочей. Введение управления с самообучением, при котором привод сам по предложенному алгоритму корректирует начало торможения с учетом прошлых ошибок в отработке координат, значительно увеличивает точность привода при простоте построения устройства 13. 1 ил.
hjj
/t,
:
a y j -v-jjy,-
hjj
Изобретение относится к машиностроению, в частности к средствам пневмоавтоматики, и может быть использовано в приводах промышленных роботов, автоматов и автооператоров.
Целью изобретения является улучшение динамических характеристик, повышение точности позиционирования и ресурса работы.
На чертеже представлена принципиальная схема привода.10
Позиционный пневматический привод состоит из силового лневмоцилиндра 1, шток 2 которого соединен с подвижным звеном 3 фрикционного тормозного устройства 4, корпус 5 которого механически соединен с осно- |г распределитель 11 и включаются распреде- ванием 6 силового пневмоцилиндра 1, рас-лители 12, 22. Элемент 24 растормаживается
пределителей 7-12, управляющего устрой- и корпус 23 гидроцилиндра 17 под действием ства 13, датчика 14 обратной связи переме-пружин 20, 21 занимает среднее положение
щений и скорости. Шток 2 связан со што-относительно поршня 16.
Hev: 16 через дросселирующий распределитель 22 перемещается в полость 18. На поршне 16 создается перепад давлений и встречная тормозная сила.
Происходит интенсивное торможение, скорость выходного штока 2 падает до «ползучей скорости и при достижении второй координаты торможения х выключается распределитель 10 и включается распределитель 9, звено 3 тормозится усилием пружины 36 и силой от давления в верхней полости тормозного устройства 4, скорость штока 2 падает до нуля и он останавливается в координате, близкой к заданной по программе, хПосле остановки штока 2 выключается
ком 15 и поршнем 16 демпфирующего гидроцилиндра 17, полости 18 и 19 которого содержат возвратные пружины 20 и 21 и соединены между собой через дросселирующий распределитель 22, а корпус 23 механически связан с подвижным элементом 24 дополнительного фрикционного тормозного устройства 25, корпус 26 которого также связан с основанием 6 силового пневмогид- роцилиндра 1. Управляющее устройство 13 соединено с распределителями 7-12, 22 и датчиком 14 каналами 27-34. Фрикционные тормозные устройства 4 и 25 содержат тормозные пружины 35 и 36.
Работа пневматического позиционного привода заключается в следующем.
В исходном состоянии распределители 7-II отключены 12, 22 включены, т. е. есть сигналы 33, 34. При этом силовой пнев- моцилиндр находится под атмосферным давлением, а звено 3 действием пружины 36 заторможено. Следовательно, застопорен и шток 2, элемент 24 под действием давления в верхней полости тормозного устройства 25 расторможен и корпус 23 гидроцилиндра 17 пружинами 20, 21 выставлен в нейтральное положение, относительно поршня 16.
При подаче от управляющего устройства 13 сигнала, например, 28 на распределитель 7 левая полость (на чертеже не обозначено) пневмоцилиндра 1 заполняется сжатым воздухом, LUTOK 2 начинает перемещаться вправо (по чертежу), с датчика 14 в устройство 13 поступает сигнал 27, пропорциональный линейному перемещению и скорости П1тока 2. При этом элемент 24, корлус 23 гидроцилиндра 17 перемещается совместно с поршнем 16. Когда шток 2 достигает координаты начала торможения л .р, она определяется устройством -13, распределители 12, 22 отключаются, а распределитель 11 включается, при этом элемент 24 под действием пружины 35 и давления в нижней полости тормозного устройства 25 стопорится, корпус 23 останавливается, жидкость из полости 19 гидроцилиндра 17 движущимся порщ25
Возможна схема с одним дросселем без
20 распределителя 22, это упрощает схему, но увеличивает время возврата гидроцилиндра 17 .в исходное положение, кроме того, изменяя при снятии сигнал 34 по определ ен- ному закону во времени при переходе поршн- ному закону во времени при переходе пррш- ня 2 в координату х, можно добиться плавного уменьшения площади дросселя и нужного закона торможения щтока 2, что исключает также удары при торможении.
Управление приводом осуществляется
30 управляющим устройством 13, которое может быть выполнено в виде ЭВМ.
Управляющее устройство 13 выполняет две функции: функцию программного позиционного управления приводом и функцию определения в режиме самообучения в про35 цессе выхода на координаты, координаты начала торможения х Программное управление осуществляется по записанной в память ЭВМ информации по координатам, которые выходной шток 2 в различных тактах должно отработать. Это
традиционная функция управления управляющих устройств позиционных приводов. При этом в устройстве управления 13 осуществляется (в каждом такте работы привода) сравнение информации, записанной
дс в память, с информацией с датчика 14 обратной связи и при совпадении этой инфор- . мации выходной щток 2 привода должен остановиться.
Точность отработки координат зависит 50 от многих факторов: стабильности сил трения, перемещаемых масс, температур, давлений, запаздываний и т. д. Учитывая то, что позиционный привод работает в системах программного управления и заранее по техпроцессу известны координаты выходного 55 щтока 2, последовательность их смены и перемещаемые массы, алгоритм управления осуществляется в режиме самообучения ЭВМ, при котором координаты начала торможения х определяется по зависимости:
распределитель 11 и включаются распреде- лители 12, 22. Элемент 24 растормаживается
Hev: 16 через дросселирующий распределитель 22 перемещается в полость 18. На поршне 16 создается перепад давлений и встречная тормозная сила.
Происходит интенсивное торможение, скорость выходного штока 2 падает до «ползучей скорости и при достижении второй координаты торможения х выключается распределитель 10 и включается распределитель 9, звено 3 тормозится усилием пружины 36 и силой от давления в верхней полости тормозного устройства 4, скорость штока 2 падает до нуля и он останавливается в координате, близкой к заданной по программе, хПосле остановки штока 2 выключается
относительно поршня 16.
5
Возможна схема с одним дросселем без
0 распределителя 22, это упрощает схему, но увеличивает время возврата гидроцилиндра 17 .в исходное положение, кроме того, изменяя при снятии сигнал 34 по определ ен- ному закону во времени при переходе поршн- ному закону во времени при переходе пррш- ня 2 в координату х, можно добиться плавного уменьшения площади дросселя и нужного закона торможения щтока 2, что исключает также удары при торможении.
Управление приводом осуществляется
0 управляющим устройством 13, которое может быть выполнено в виде ЭВМ.
Управляющее устройство 13 выполняет две функции: функцию программного позиционного управления приводом и функцию определения в режиме самообучения в про5 цессе выхода на координаты, координаты начала торможения х Программное управление осуществляется по записанной в память ЭВМ информации по координатам, которые выходной шток 2 в различных тактах должно отработать. Это
традиционная функция управления управляющих устройств позиционных приводов. При этом в устройстве управления 13 осуществляется (в каждом такте работы привода) сравнение информации, записанной
с в память, с информацией с датчика 14 обратной связи и при совпадении этой инфор- . мации выходной щток 2 привода должен остановиться.
Точность отработки координат зависит 0 от многих факторов: стабильности сил трения, перемещаемых масс, температур, давлений, запаздываний и т. д. Учитывая то, что позиционный привод работает в системах программного управления и заранее по техпроцессу известны координаты выходного 5 щтока 2, последовательность их смены и перемещаемые массы, алгоритм управления осуществляется в режиме самообучения ЭВМ, при котором координаты начала торможения х определяется по зависимости:
10
,- -i-&Xi t,
где Av/ - координата начала торможения при очередной отработке конкретной координаты с конкретного исходного состояния выходного штока 2;
л,-, - координата начала торможения при отработке той же координаты с того же исходного состояния выходного звена в ближайшем предыдущем такте отработки координаты;
Ад:,-, - величина пробега (знак минус) координаты или величина недохода (знак плюс) координаты в ближайшем предыдущем такте отра- 15 ботки этой же- координаты (знаки перед Дл:,-1 меняются на обратные при подходе к координате с обратной стороны;
/ - номер очередного гакта
Причем Хг,Хт2-1 Х-Хп.т.,
Сдех -координата, которую должен отработать выходной шток 2 привода; jcn.T. - путь торможения, который получается из статических расчетов привода при максимальной силе торможения гидроцилиндра 17 и при заведомо минимальном запаздывании распределителей 11, 22. Это обеспечивает гарантированный пробег координаты при первой отработке приводом конкретной координаты и выход после пуска на режим самообучения - автоматической коррекции от такта к такту координаты начала торможения с учетом ошибки отработки конкретной координаты в ближай- щем прошлом. Расчетная величина хп.т. вводится при программировании координат в ЭВМ.
При пуске привода в режиме самообучения первое торможение, а именно срабатывание распределителя 11 и включение раснейщих отработка;, сдвигая начало торможения в ту или другую сторону, т. е. в течение короткого времени параметры привода (коэффициенты трения, температура, износ и т. д.) изменяются ничтожно мало, то это делает возможность получить высокую точность привода как в этот период, так и в процессе всей эксплуатации привода, контролируя и корректируя их влияние на точность привода.
Предложенный способ управления не требует большого объема памяти ЭВМ, освобождает от необходимости вводить в ЭВМ характеристики .множества изменяющихся параметров, влияюших на -точность.
Процесс начального обучения привода по 3-5 тактов на координату с различными м.ассами и с выходом его на максимальную точность позиционирования составляет несколько минут, дальше работа осуществляется автоматически. Каждой координате 20 с каждой массой соответствует своя ячейка питания ЭВМ. При определении второй координаты начала торможения jfr также в режиме самообучения точность привода возрастает.
25
30
35
Для того, чтобы координата начала торможения «не ушла в сторону, предусмотрен сдвиг по программе Длго этой координаты в сторону пробега при каждом такте или через ряд тактов на несколько долей поля отработки координаты , 1 мм - программное «возмущение привода. Такой алгоритм )a x i- +Axi-i+ xo управления с программным «возмущением с перебегом в сторону отработки координат «прижимает координату начала торможения ближе к координате «остановка, уменьшая время движения на «ползучей скорости. Это увеличивает быстродействие привода.
Предложенный позиционный пневматический привод позволяет снизить ударные нагрузки, т. к. тормоз обеспечивает необ45
пределителей 12, 22, осуществляется по жест- 40 ходимое замедление выходного штока 2 прикой программе при достижении выходнымвода, развивая большую тормозную силу
штоком 2 координаты гг|. Пробег АЛЛ Ал:2-1,за счет перепада давлений на поршне 16
гидроцилиндра 17 при полностью заторможенном корпусе 23 и снижая скорость до «ползучей.
Привод позволяет также получить высокую точность позиционирования, т. к. окончательное торможение и выход на координату осуществляется фрикционным тормозным устройством 4 с «ползучей скорости, а не с рабочей максимальной скорости, т. е. разброс постоянной времени привода тормоза и коэффициента трения трущихся пар фрикционного привода при торможении с .малой скорости меньще сказывается на неточности отработки координат, чем при торможении
всех факторов, приводящих к ощибке по- 55 большей скорости.
зиционирования, сводя эту ошибку в каждомВ предложенном приводе потенциальная
очередном такте к минимальной величине,
т. е. привод учится на предыдущих ощибках
и стремится к сведению их к нулю при далькоторый получается в первом такте, используется для сдвига jtTi при определении координаты начала торможения при очередном такте отработки этой же координаты с той же исходной позиции. Величина пробега или недохода координаты, полученная после остановки выходного штока 2 при вторичной отработке координаты, используется ЭВМ для вычисления по выше приведенной „ зависимости координаты начала торможения в текущем третьем такте отработки этой же координаты и т. д.
Этот способ управления позволяет автоматически учитывать суммарное влияние
энергия движущихся масс и основная часть энергии активных движущихся сил рассеивается при торможении в тепловую энергию
0
5
нейщих отработка;, сдвигая начало торможения в ту или другую сторону, т. е. в течение короткого времени параметры привода (коэффициенты трения, температура, износ и т. д.) изменяются ничтожно мало, то это делает возможность получить высокую точность привода как в этот период, так и в процессе всей эксплуатации привода, контролируя и корректируя их влияние на точность привода.
Предложенный способ управления не требует большого объема памяти ЭВМ, освобождает от необходимости вводить в ЭВМ характеристики .множества изменяющихся параметров, влияюших на -точность.
Процесс начального обучения привода по 3-5 тактов на координату с различными м.ассами и с выходом его на максимальную точность позиционирования составляет несколько минут, дальше работа осуществляется автоматически. Каждой координате 0 с каждой массой соответствует своя ячейка питания ЭВМ. При определении второй координаты начала торможения jfr также в режиме самообучения точность привода возрастает.
5
0
5
Для того, чтобы координата начала торможения «не ушла в сторону, предусмотрен сдвиг по программе Длго этой координаты в сторону пробега при каждом такте или через ряд тактов на несколько долей поля отработки координаты , 1 мм - программное «возмущение привода. Такой алгоритм )a x i- +Axi-i+ xo управления с программным «возмущением с перебегом в сторону отработки координат «прижимает координату начала торможения ближе к координате «остановка, уменьшая время движения на «ползучей скорости. Это увеличивает быстродействие привода.
Предложенный позиционный пневматический привод позволяет снизить ударные нагрузки, т. к. тормоз обеспечивает необВ предложенном приводе потенциальная
энергия движущихся масс и основная часть энергии активных движущихся сил рассеивается при торможении в тепловую энергию
жи.ичигги. пп().о,1,ящую ч е()ез дросселирую- iuiii t ii;-H- i KMC un4Mi, 22. На долю же фрик- .i«)Hii)i4) уст})ойства 4, осуществляющего )Koii4;ne.ibi:i,i;i останов исполнительного звена, остается Fleoб.xoдимocть рассеять отно- ,Р() 11ебильн ую оставид юся энергию. ;о фппкнионное тормозное устройство 4 рапотаег в «легких условиях (во.зможно iciin.ib3OfiaHHe и второго фрик дионного устройства 25 фи одновременном включении И.1П выключении распределителей 11, 22), /а это позволяет получить более стабильный ко- ффициент трения, большую точность останова и большой ресурс тормозного устройства и привода в целом.
Введение управления с самообучение.м, при котором привод са.м по предложенному алгоритму корректирует начало тор.можения с учетом про1нлы.х ошибок в огработке координат, значите.чьно увеличивает точность
привода при простоте построения устройства управления.
Формула изобретения
Позиционный пневматический привод, 5 содержащий силовой пневмоцилиндр, установленный на основании, демпфирующий гидроцилиндр, шток которого жестко связан со штоком пневмоцилиндра, а полости сообщены между собой через дросселирующий
Q распределитель, и фрикционное тормозное устройство, размещенное на основании с возможностью взаимодействия со щтоком пнев- моцилиндра, отличающийся тем, что, с целью улучшения динамических характеристик, повышения точности позиционирования и ре5 сурса работы, привод снабжен дополнительным фрикционным тормозным устройством, жестко связанным с основанием с возможностью взаимодействия с корпусом гидро- Нилиндра.
| Моментный позиционный пневмогидропривод | 1987 |
|
SU1455062A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
