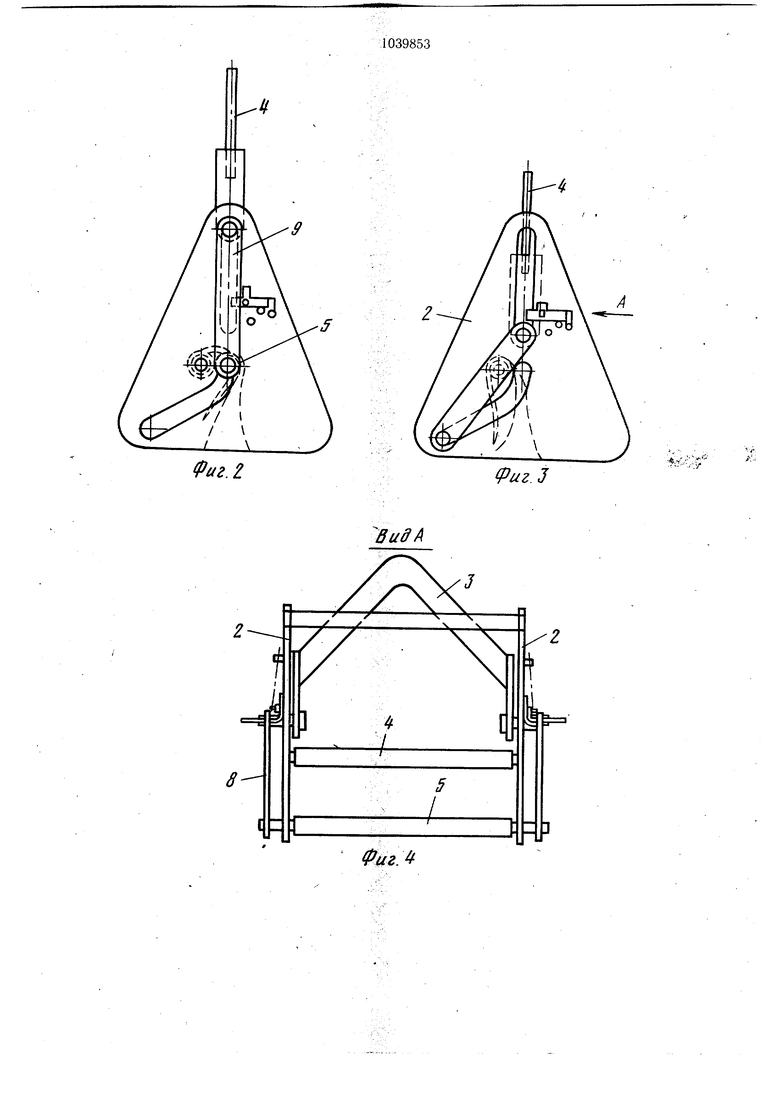
Изобретение относится к механизации погрузочно-разгрузочных работ, а именно к грузозахватным устройствам для подъема мягких контейнеров. Известно устройство для захвата мешков, состоящее из треугольной рамы, одна сторона которой является зажимной, и зажимного стержня, вводимого в петлю, образованную горловиной мешка, перегнутой над зажимной стороной рамы 1. Однако это устройство требует ручных операций зачаливання, при которой рабочий делает из горловины мешка петлю и вставляет в нее стержень и расчаливание, при которой стержень вынимается из петли. Наиболее близким к изобретению является грузозахватное устройство для мягких контейнеров, содержащее вертикально расположенные щеки, между которыми установлена траверса и зажимные горизонтальные щтанги, одна из которых соединена со щеками жестко, а вторая с- возможностью относительного перемещения 2. Однако известное устройство облегчает, но не устраняет вспомогательные ручные операции всего процесса зачалки и расчалки горловины контейнера, включая замыкание и размыкание зажимных штанг. Цель изобретения - повышение произ-, водительности путем у.меньщения вспомогательных ручных операций при зачалке и автоматизации процесса расчалки горловины контейнера. Поставленная цель достигается тем, что в устройстве, содержащем вертикально расположенные щеки, между которыми установлена траверса и зажимные горизонтальные штанги, одна из которых соединена со щеками жестко, а вторая с возможностью относительного перемещения, каждая щека выполнена с двумя пазами, в одном из которых расположен конец траверсы, а в другом - конец второй штанги, соединенный с концом траверсы, при этом по крайней мере на одной из щек установлен фиксатор траверсы, включающий подпружиненный Т-образный рычаг, щарнирно закрепленный на щеке, и два жестко закрепленных упора для фиксации рычага. На фиг. I изображено устройство и момент начала зачалки горловины контейнера; на фиг. 2 - окончание процесса зачалки; на фиг. 3 - устройство в момент расчалки; на фиг. 4 - вид А на фиг. 3; на фиг. 5 - фиксатор в положении «Исходное, на фиг. б - фиксатор в положении «Замкнуто, Устройство навешивается на крюк грузоподъемного средства 1, содержит две щеки 2, между которыми закреплены траверса 3 и две зажимные штанги 4 и 5, одна из которых закреплена неподвижно, а вторая может перемещаться по заданной траектории. Каждая щека 2 выполнена с двумя пазами б и 7. В одном перемещается конец траверсы 3, а во втором - конец подвижной зажимной щтанги 5. Концы подвижной зажимной щтанги 5 и концы траверсы 3 соединены между собой боковой тягой 8. На каждой из щек 2 установлен двухпозиционный стопорный механизм-, выполненный в виде подпружиненного Т-образного рычага 9, качающегося на оси 10, закрепленной на щеке. Т-образный рычаг 9 удерживается в крайнем вертикальном положении «Исходное и крайнем горизонтальном положении «Замкнуто пружиной 11, которая одним концом закреплена на Т-образном рычаге, а другим - на щеке. Угол поворота Т-образного рычага ограничивается упорами 12 и 13. Устройство работает следующим образом. Грузозахватное устройство устанав.тивается на контейнер, рабочий перебрасывает горловину контейнера через неподвижную зажимную щтангу 5 и устанавливает стопорный механизм в положение «Исходное, поворачивая Т-образные рычаги 9 в вертикальное положение до упоров 12, где они удерживаются пружинами 11 растяжения (фиг. 1 и 5). При движении грузоподъемного средства 1 вверх концы траверсы перемещаются в пазах 6 щек 2 и посредством тяг 8 перемещают подвижную, зажимную штангу 5 в пазах 7, которая, дойдя до неподвижной зажимной щтанги 4, зажимает горловину контейнера. Поднимаясь вверх, концы траверсы 3 нажимают на выступы Т-образных рычагов 9. переводят их через мертвую точку, после чего пружины 11 растяжения устанавливают рычаги 9 в горизонтальное положение «Замкнуто до упоров 13 (фиг. 2 и б). При опускании устройство устанавливается на контейнер и при Дальнейшем движении грузоподъемного средства 1 вниз концы траверсы 3 перемещаются в пазах б щек 2, нажимают На выступы Т-образных рычагов 9, отжимают их и проходят в нижнее положение. Т-образные рычаги не проходят мертвую точку и пружины 11 растяжения возвращают их в положение «Замкнуто до упоров 13 (фиг. 3 и б). Подвижная зажимная штанга 5 оказывается зафиксированной в разомкнутом относительно неподвижной зажимной щтанги 4 положении и при движении грузоподъемного средства 1 вверх, .горловина контейнера сходит с неподвижной зажимной щтанги 4. Предлагаемое изобретение позволяет повысить производительность труда путем уменьшения вспомогательных ручных операций при зачалке горловины контейнера и автоматизации процесса расчалки гор,ловины контейнера.
Фиг. 2.
fpui.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов в мешках | 1988 |
|
SU1533998A1 |
| Грузозахватное устройство | 1983 |
|
SU1169928A1 |
| Устройство для захвата заполненных мешков | 1987 |
|
SU1454748A1 |
| Саморазгружающийся контейнер | 1986 |
|
SU1386531A1 |
| Замок для стропа | 1983 |
|
SU1197976A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Захватное устройство для грузов в мешках | 1980 |
|
SU1104091A1 |
| Захватное устройство для грузов в мешках | 1983 |
|
SU1129167A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МЯГКИХ КОНТЕЙНЕРОВ | 1990 |
|
RU2011628C1 |
| Устройство для захвата заполненных мешков | 1990 |
|
SU1761610A1 |
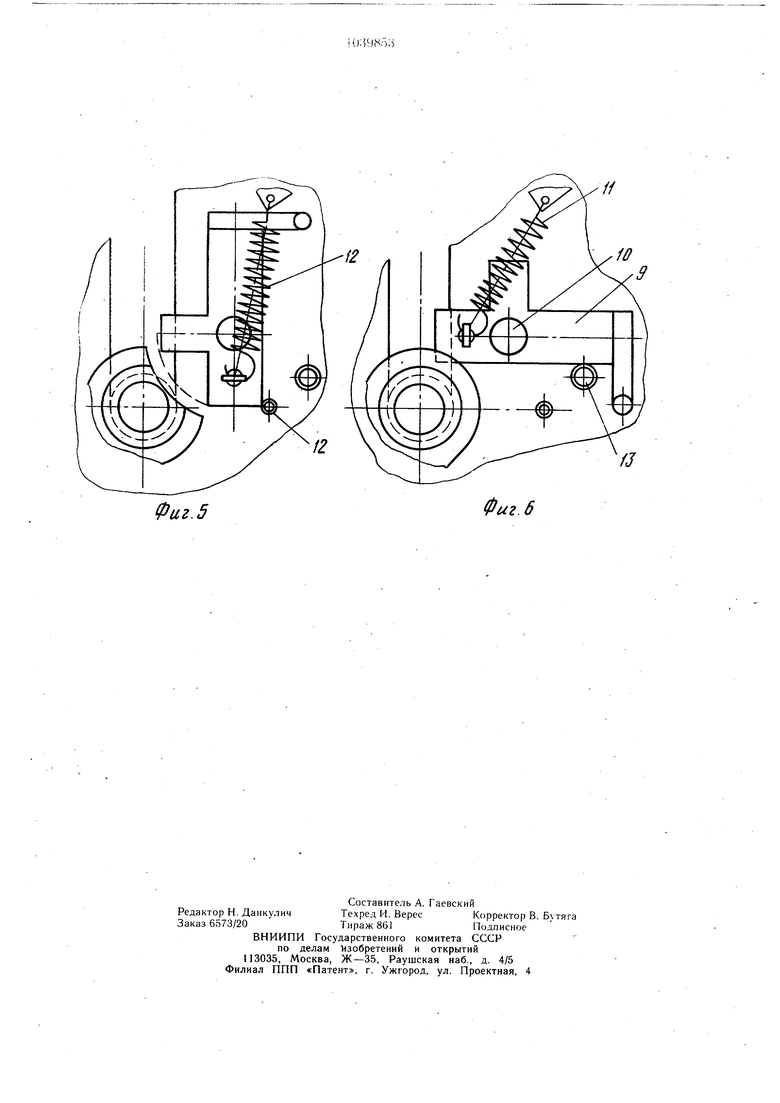

Шг: Фиг. 5 Фиг. 6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЯЧЕЙКА МАГНИТНОЙ ПАМЯТИ С ПРОИЗВОЛЬНЫМ ДОСТУПОМ | 2018 |
|
RU2704732C1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЭЛЕКТРОХИМИЧЕСКАЯ АНАЛИТИЧЕСКАЯ ТЕСТ-ПОЛОСКА С ПЕРЕСЕКАЮЩИМИСЯ КАМЕРАМИ ДЛЯ ПРИЕМА ОБРАЗЦА | 2013 |
|
RU2646493C2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
