Изобретение относится к подъемно- транспортной технике, в частности к захватным устройствам для грузов в метках (мягких контейнерах), и может найти применение в различных отраслях народного хозяйства.
Цель изобретения - повышение производительности и безопасности труда путем устранения ручных операций при захвате горловины мешка.
На фиг.1 показано захватное устрой ство, вид сбоку; на фиг.2 - то же, РИД сверху; на фиг.З - вид А на фиг..; на фиг.А - схема работы с устройством.
Захватное устройство содержит несу шие -элементы 1 , на которых на поворотных осях 2 шарнирно установлены щеки 3. Каждая ось 2 жестко связана со своей щекой 3. Между щеками 3 размещен вал 4, Одна из щек 3 снабжена пальцем 5. На концах несущих элементов 1 размещены опорные стойки 6, в которых шарнирно закреплен зажимной стержень 7 посредством рычагов 8, каждый из которых снабжен открытым плзом 9 и заплечиком 10. На опорных стойках 6 установлены упоры I1.
Одна из щек 3 кинематически связана со штоком силового цилиндра 12, корпус которого закреплен на одном из несущих элементов 1, На оси 2 шарнирно установлен фиксатор, выполненный в виде двуплечего рычага 13 с противовесом 14, и успокоитель 15 колебаний фиксатора, который содержит кольцо, снабженное выступом 16 и жестко сидящее на оси 2.
Для соединения с грузоподъемным механизмом несущие элементы 1 на одном из участков имеют коробчатое сечение и устройство для крепления (не показано). Захватное устройство устанавливается, например, на вилы погрузчика, а силовой цилиндр 12 соединяется с гидросистемой погрузчика.
Устройство работает следующим об разом.
С помощью силового цилиндра 12 щеки 3 переводятся в крайнее верхнее
ч-
10
15
30
-„
.,
35
50
55
положение. Это происходит при полностью выдвинутом штоке силового цилиндра 12. Вал 4, перемещаясь вместе со щеками 3, кинематически взаимодействует с открытыми пазами 9 рычагов 8 и поворачивает их таким образом, что зажимной стержень 7 занимает верхнее положение. При этом рычаги 8 заплечиками 10 опираются на упоры 11, а палец 5, перемещаясь вверх совместно со щекой 3, освобождает двуплечий рычаг 13, последний под воздействием противовеса 14, поворачиваясь на оси 2, своим свободным концом устанавливается против зажимного стержня 7, предотвращая его обратное падение. От возможных колебаний при движении грузоподъемного средства двуплечий рычаг 13 удерживается в иррхнем положении выступом 16 успокоителя 15,
Влл 4 и зажимной стержень 7 в открытом положении располагаются на разных уролнях, образуя мазор, достаточный для введения предварительно сформированной и наклоненной горловины мешка с помощью маневров грузоподъемного механизма. Это позволяет производить захват горловины мешка без участия подсобного рабочего с 1-3-го ярусов.
После заведения горловины метка в образовавшийся зазор при втягивании штока силового цилиндра 12 щеки 3 приводятся во вращение. При этом щека 3 пальцем 5 вращает свободный конец двуплечего рычага 13 вниз, освобождая зажимной стержень 7, а вал 4, вращаясь вместе со щеками 3, подгибает лежащую на зажимном стержне 7 горловину мешка вокруг зажимного стержня 7 и, вступая в кинематическое взаимодействие с открытым пазом 9 рычагов 8, поворачивает их цо положения, при котором зажимной стержень 7 ложится со смещением на вал 4, в результате чего горловина мешка охватывает зажимной стержень 7 на дополнительный угол, образуя транспортную петлю.
В зачры ом положении вап 4 своими концами, контактируя с несущими -пе- ментами 1, создает условия, при которых нагручка от веса воспринимается валом 4 и несущими эпе- ментами 1 , ,и не перрдаетсч на силово цилиндр 12.
При поднятии мешка с помощью устройства происхс ыт окончательный зажим горловины иод действием ег веса. Освобождение горловины етка производится после установки мешка на опорную поверхность или на мешок при складировавши в нескольк ч ярусов путем раскры- я захва ног о устройства с г гмощью готового ш-пиндра 120 При этом вап ч и зажимной стержень 7 занимают крайние верхннр погто ения и
Освобождают ОрГОВИНу flUKl,
положение контта двуппечг- го рычага 13 обеспечивается м, противовес 14, находя ист в вр«
мя в нижнее положении
своим кг ином
в
упирается в несущие ементы т Б.
При движении транспортного сретс ва (погрузчика) по неровному тпу противовес lA может подгрьп Hyiu i тогдс свобода IH конец двуплече: j i- чага 13 может опуститься вниз и гыи ти из контакта с зажимным стержн м /, В результате этого рычаги 8 с длинным стержнем 7 могут опрст внутрь устройства, и кинематическое взаимодействие вала 4 с пазами 9 рычагов 8 при замыкании будет невозможно. Этому препятствует ycnoiгитедь 15, выполненный в виде кольца, закреп ленного на оси 2, на которой закреплен выступ 16. В исходном положении захвата выступ 16 занимает положение 16 а. В результате вращение двуплече- го рычага 13 с осою 2 ограничивается с одной стороны контактом njотивове- са 14 с несущими элементами 1 в точке Б (фиг.З), а с другой стороны контактом выступа 16 о верхнюю заднюю плоскость двуплечего рычага 13. При этом двуплечий рычаг 13 застопорен от вращения как по часовой стрелке, так и против нее и находится против зажимного стержня 7, удерживая от поворота рычаги 8.
5
О
5
показано, i эк подводит я тяжиннои стержень под горловин-1 NeiLha( на фиг,4в - подъем захватного усгротт ва вместе с горповино мешка, на фиг„4г - наезд груЗО ОДЬРМНОГО меха низма вмест0 с захватным wтроисi оч на мешо , Горловина i ешка до и.о1 но жесткая и не сминается при наезде. На фиг.4д показан захват гормовины мешка. Вал 4 и зажимной стержень 7 с помощью силового нилиндг i 2 переводятся в К1айние нижние положения. Происходит захват горлоьины мешка и формирование транспортной петли. На фиг.4е показан подъем мешка.
Далее мешок перевозится в место и устанзвливается ьл опорную поверхность или на другой мешок при складировании в несколько ярус. С помощью силового цилиндра 12 произ водится раскрытие я-ахватчого устрой ства и ождени орловинь метг ,i Груз чподъемныл MexihHSN рмесм г зл ч ватным устройством, О1ьезжая от мен
а, расправляет е о i фчоьину JOJUHM- HIIM стержнем / и тавляет ее накло нечч и и РЧЬГИ } по п д ющему я i 1ту „
4 о р
у л а и з и
р е т е н и я
5
0
Захват н
1
з мепках, содер аы
11
С VllI 1с
roj u
14 IpJ j. JJlLf
закреп
ты, в средней ча ш i neHt.1 , HI ко o;tix BTjiOAHCtib not приьодо и гное т iibo гори З(ттт1гьно 1 oi 11 сттноь i и je ns сое диненные v с обо t по i, IIM тон
стерлен ,
Т v,
ЧТО,
тепьности
1
01 1ИР Ю Щ С t L Я
С Ц ШЮ ПОРЫЛ Ни ПГ ИЗНОД
и безопа н v п труда путем
устранения ручник огн t ном npi j ь те горловины мет а, м ib ci.o Aiii сатором и размещена IMH на типах нес цих элемецтор упорами и оч )рными сбойками, на которых установлены с возможностью поворота в вертикальней плоскости соединенные между собой ук j занным зажимным стержнем рычаги, вь полненные с открытым пазом для взаи модействия с указанным валом при за жиме горловины и злппечиками для вза имодействия с указанными упорами в

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов в мешках | 1983 |
|
SU1129167A1 |
| Грузозахватное устройство для мягких контейнеров | 1982 |
|
SU1039853A1 |
| Захватное устройство для грузов в мешках | 1980 |
|
SU1104091A1 |
| Грузозахватное устройство | 1983 |
|
SU1169928A1 |
| Захватное устройство для мешков | 1985 |
|
SU1393761A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МЯГКИХ КОНТЕЙНЕРОВ | 1990 |
|
RU2011628C1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| Захват для грузов в мягкой таре | 1978 |
|
SU802162A1 |
| Способ подготовки крупногабаритных мешков к загрузке и устройство для осуществления этого способа | 1979 |
|
SU791213A3 |
| Захватное устройство для мешков | 1987 |
|
SU1418266A1 |


Изобретение относится к подъемно-транспортной технике, в частности к захватным устройствам для грузов в мешках (мягких контейнерах), и может быть применено в различных отраслях народного хозяйства. Цель изобретения - повышение производительности и безопасности труда путем устранения ручных операций при захвате горловины мешка. Захватное устройство для грузов в мешках содержит несущие элементы 1, на которых установлены с возможностью поворота силовым цилиндром 12 щеки 3, между которыми размещен вал 4, зажимной стержень 7. На опорных стойках 6, снабженных упором 11, шарнирно закреплены рычаги 8, каждый из которых имеет открытый паз 9 и заплечик 10, а между ними установлен зажимной стержень 7. Фиксатор снабжен успокоителем колебаний 15. Силовым цилиндром 12 щеки 3 с валом 4 поворачиваются в верхнее положение. При этом вал 4 взаимодействует с открытыми пазами 9 рычагов 8, поворачивая их. Вал 4 и зажимной стержень 7 в открытом положении образуют зазор, достаточный для введения предварительно сформованной и наклоненной горловины мешка с помощью маневров грузоподъемного средства. При срабатывании силового цилиндра в противоположном направлении щеки 3 вращаются, палец 5 нажимает на свободный конец фиксатора, освобождает зажимной стержень 7. Вал 4 попадает в открытые пазы 9 рычагов 8 и поворачивает их вместе со стержнем 7, образуя при этом из горловины мешка транспортную петлю. В месте назначения щеки 3 и рычаги 8 возвращаются в исходное положен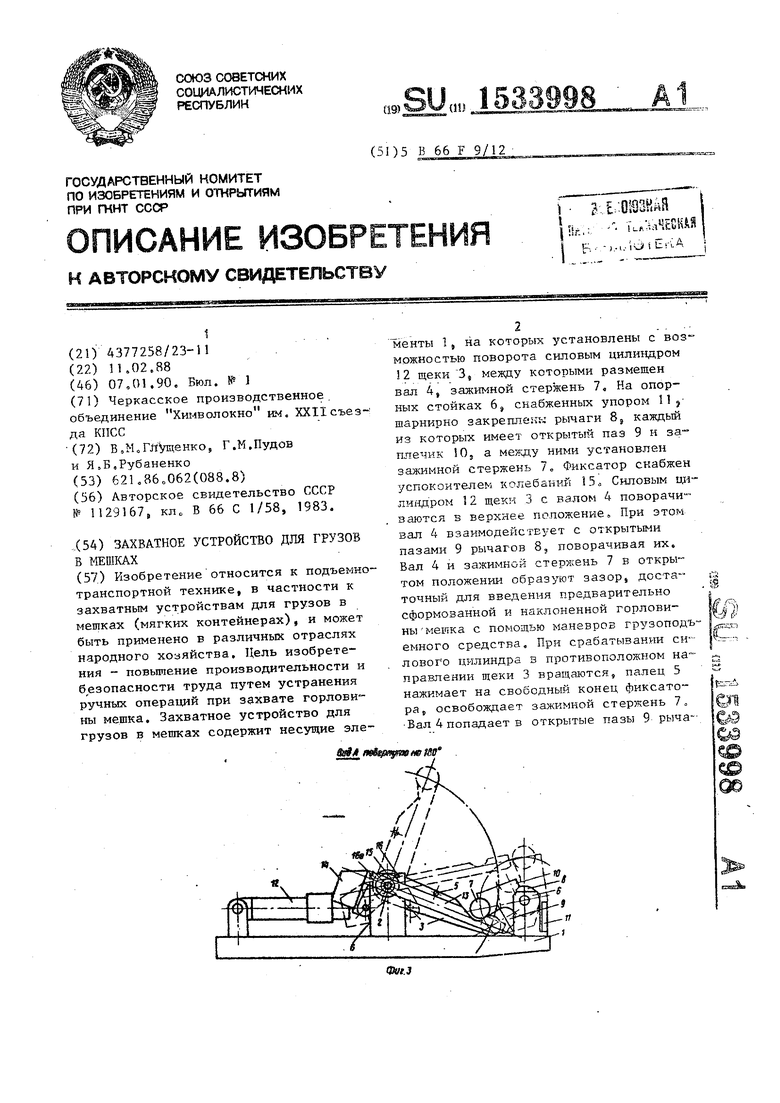
На и.4а показано исходное состоя-55 исходном положении рычагов, указанный
ние захватного устройства. Вал 4 н зажимной стержень 7 занимают крайнее верхнее положение. Устройство готово к захвату горловины мешка. На фиг.4б
фиксатор выполнен в пде двуплечего рьчага, устанотенного на указанной горизонтальной оси с возможностью or раниченно о поворота в одном направисходном положении рычагов, указанный
фиксатор выполнен в пде двуплечего рьчага, устанотенного на указанной горизонтальной оси с возможностью or раниченно о поворота в одном направлении, противовесом, который закреплен на одном его плече, а в другом направлении - пальнем, который закреплен на указанной щеке с возможностью взаимодействия с другим плечом двуплечего рычага, которое установлено с возможностью взаимодействия с указанным зажимным стержнем в его исходном гостоянии.
ю
694
Фиг.1
ss j .use ,г,и ,п
У;
отличающееся тем, что.оно снабжено успокоителем колебаний фиксатора, выполненным в виде жестко закрепленного на указанной оси кольца, снабженного выступом для взаимодействия с фиксатором в его исходном положении .
Фне.2
9)е)
фигА
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
