СО iQ t
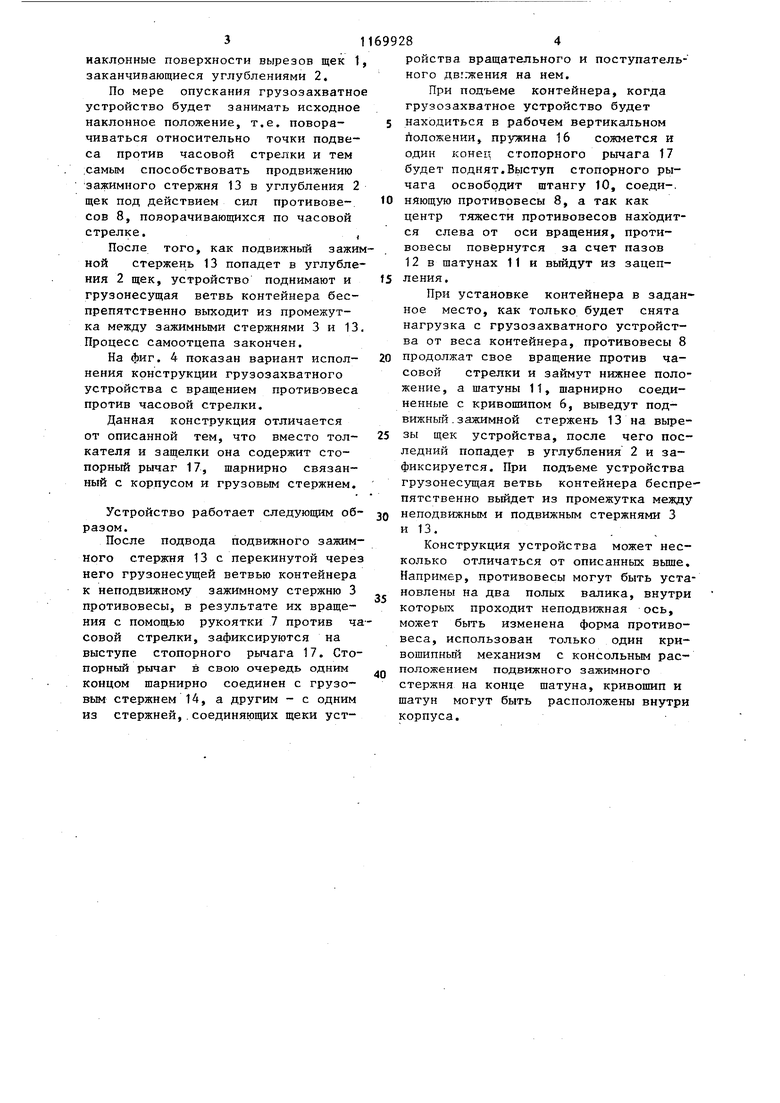
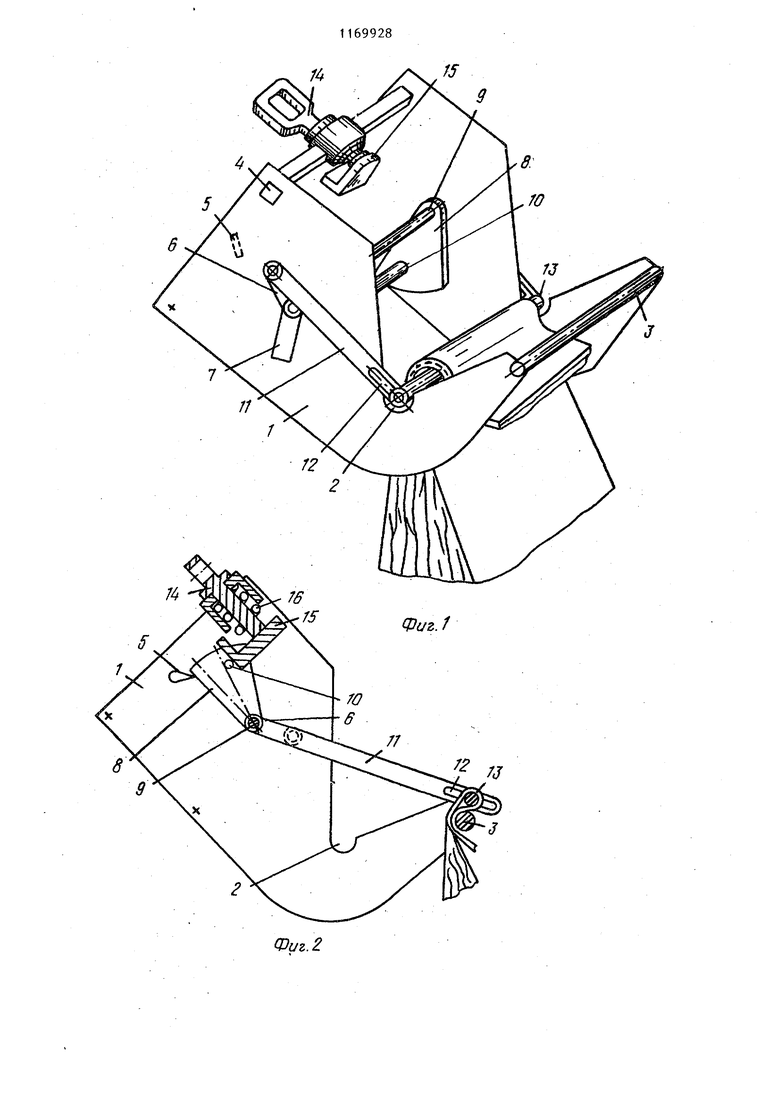
00 Изобретение относится к грузозах ватным устройствам для подъема и транспортирования грузов в мягких контейнерах (мешках). Цель изобретения- повышение надежности. На ,фиг. 1 изображено устройство в состоянии самоотцепа, общий вид; на фиг. 2 - то же, в начальный моме подъема; на фиг, 3 - то же, в начал ный момент самоотцепа; на фиг. 4 устройство в начальнЬш момент подъе (вариант исполнения). Грузозахватное устройство (фиг. содержит корпус, образованньш двумя щеками 1 с наклонными вырезами, зак чивающимися углублениями 2, причем ки жестко скреплены между собой сте нями, в том числе зажимным 3. и несу щим 4 .стержнями, защелку 5, спаренный кривошипньй механизм, образованньш кривошипами 6 с рукоятками 7 противовесами 8, посаженными на вал 9 и жестко соединенными между собой штангой 10, шатунами 11, имеющими на концах пазы 12, в которых подвижно закреплен зажимной стержень 13. Для подвеса к грузовому канату устройство снабжено грузовым стержнем 14, проходящим через отверстие в несущем стержне 4, с толкателем 15 и пружиной 16, установленной между толкателем 15 и несущим стержнем 4. Устройство работает следующим образом. Исходное положение грузозахватного устройства показано на фиг. 1 Устройство находится в наклонном положении по отношению к точке подвеса. В этом положении зажимной стержень 13 находится в углублениях 2 щек устройства, а противовесы 8 кривошипного механизма находятся в нижнем положении. Для обеспечения подъема грузонесущую ветвь контейнера вводят в устройство снизу и перегибают через стержень 13 таким образом, чтобы ко нец ветви контейнера был обращен в сторону неподвижного зажимного стержня 3. Приподнимая стержень 13 с перекинутой через него грузовой ветвью контейнера, выводят его из углублений 2 и одновременно с помощью рукоятки 7 поворачивают кривошипы b но часовой стрелке, при этом противовесы 8 тлкже перемещаются по часовой стрелке, а стержень 13 подводится вплотную к стержню 3. Во избежание возврата в исходное положение противовесы фиксируются защелкой 5. Процесс подготовки контейнера к подъему закончен. Детали устройства находятся в положении, показанном на фиг. 2. В начальный момент подъема грузозахватное устройство поворачивается относительно точки подвеса по часовой стрелке, при этом выбирается .слабина в складках горловины контейнера и происходит навивка горловины контейнера на стержнях 3 и 13. Внутренняя, прилегающая к стержням складка навивается по их окружности, наружная - по окружности, увеличенной числом складок горловины. За счет разницы радиуса навивки с одновременным выбором слабины складок достигает выравнивание нагрузок в наружной и внутренней складках горловины контейнера. При дальнейшем подъеме пружина сжимается под действием возраста- i ющей нагрузки, обеспечивая плавное возрастание Нагрузки в горловине контейнера. Одновременно со сжатием пружины толкатель 15 поднимается вверх. С выводом грузозахватного устройства из исходного наклонного положения в рабочее вертикальное центр тяжести противовеса будет находиться с правой стороны относительно оси вращения. Наличие пазов в шатунах обеспечивает беспрепятственный поворот противовесов под действием собственного веса по часовой стрелке на угол, достаточный для захода штанги, соединяющей противовесы, в зону действия толкателя 15. После перемещения при установке в момент касания контейнером опорной поверхности (фиг.З) начнут снижаться нагрузки в элементах грузозахватного устройства и в первую очередь начнет разжиматься пружина 16. Толкатель 15 будет давить на штангу 10, соединяющую противовесы. Закрепленный в пазах 12 на концах шатунов 11 подвижный зажимной стержень 13 отойдет от неподвижного зажимного стержня 3 и выйдет на
наклонные поверхности вырезов щек 1, заканчивающиеся углублениями 2.
По мере опускания грузозахватное устройство будет занимать исходное наклонное положение, т.е. поворачиваться относительно точки подвеса против часовой стрелки и тем :самым способствовать продвижению зажимного стержня 13 в углубления 2 щек под действием сил противовесов 8, поворачивающихся по часовой стрелке.,
После того, как подвижный зажимной стержень 13 попадет в углубления 2 щек, устройство поднимают и грузонесущая ветвь контейнера беспрепятственно выходит из промежутка между зажимными стержнями 3 и 13, Процесс самоотцепа закончен.
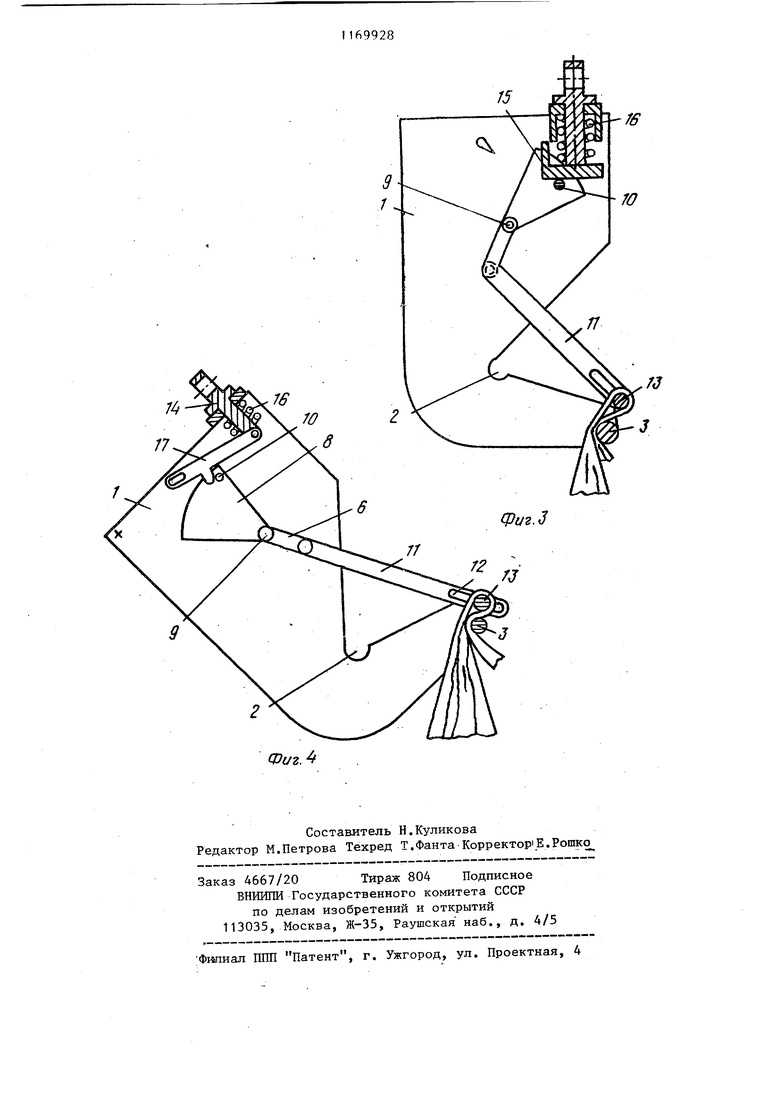
На фиг. 4 показан вариант исполнения конструкции грузозахватного устройства с вращением противовеса против часовой стрелки.
Данная конструкция отличается от описанной тем, что вместо толкателя и защелки она содержит стопорный рычаг 17, шарнирно связанный с корпусом и грузовым стержнем.
Устройство работает следующим образом.
После подвода подвижного зажимного стержня 13 с перекинутой через него грузонесущей ветвью контейнера к неподвижному зажимному стержню 3 противовесы, в результате их вращения с помощью рукоятки 7 против часовой стрелки, зафиксируются на выступе стопорного рычага 17. Стопорный рычаг в свою очередь одним концом шарнирно соединен с грузовым стержнем 14, а другим - с одним из стержней,.соединяющих щеки устройства вращательного и поступательного дв.гжения на нем.
При подъеме контейнера, когда грузозахватное устройство будет 5 находиться в рабочем вертикальном Лоложении, пружина 16 сожмется и один конец стопорного рычага 17 будет поднят.Выступ стопорного рычага освободит штангу 10, соеди-.
0 няющую противовесы 8, а так как
центр тяжести противовесов находится слева от оси вращения, противовесы повернутся за счет пазов 12 в шатунах 11 и выйдут из зацепS ления.
При установке контейнера в заданное место, как только будет снята нагрузка с грузозахватного устройства от веса контейнера, противовесы 8
0 продолжат свое вращение против часовой стрелки и займут нижнее положение, а шатуны 11, шарнирно соединенные с кривошипом 6, выведут подвижный, зажимной стержень 13 на вырезы щек устройства, после чего последний попадет в углубления 2 и зафиксируется. При подъеме устройства грузонесущая ветвь контейнера беспрепятственно выйдет из промежутка между
0 неподвижным и подвижным стержнями 3 и 13.
Конструкция устройства может несколько отличаться от описанных вьш1е. Например, противовесы могут быть установлены на два полых валика, внутри которых проходит неподвижная ось, может быть изменена форма противовеса, использован только один кривошипньш механизм с консольным рас-
положением подвижного зажимного стержня на конце шатуна, кривошип и шатун могут быть расположены внутри корпуса.
Фиг. 2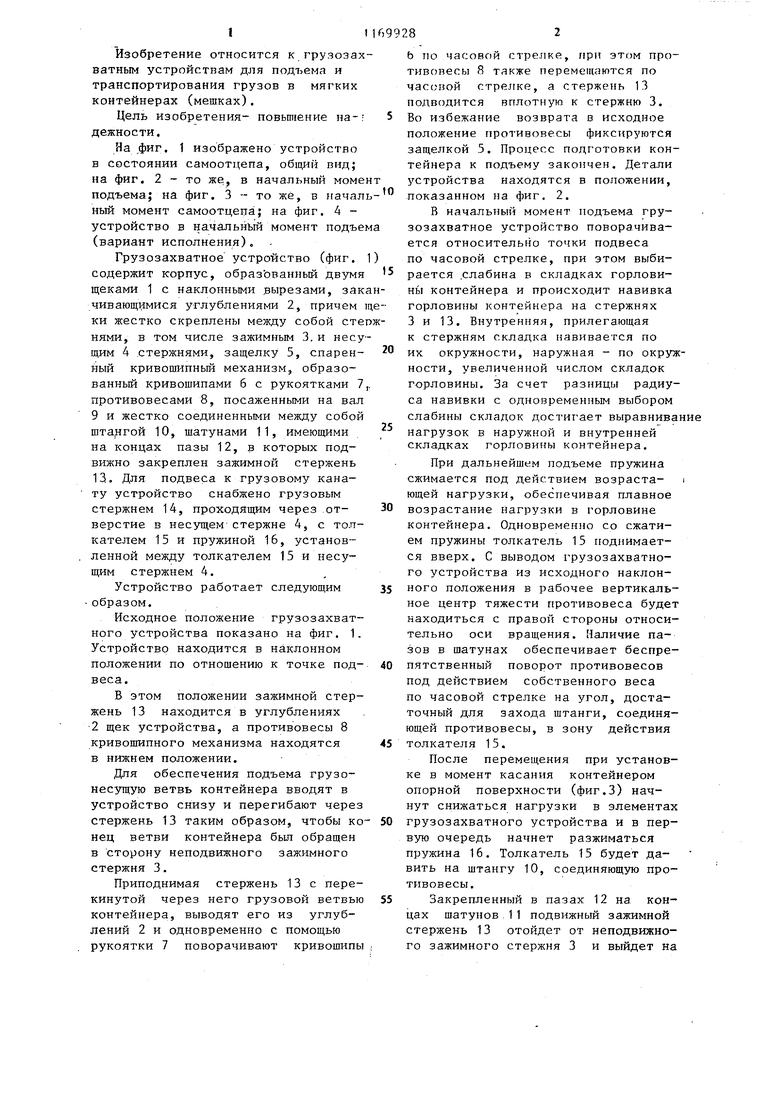
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство для мягких контейнеров | 1982 |
|
SU1039853A1 |
| Самоотцепляющееся захватное устройство | 1987 |
|
SU1495263A1 |
| Строповочный замок | 1980 |
|
SU933603A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ КРУПНОГАБАРИТНОГО ЗЕРКАЛА ТЕЛЕСКОПА С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 2024 |
|
RU2837324C1 |
| Грузозахватное устройство для мешковых грузов | 1978 |
|
SU931654A1 |
| Захватное устройство для мешков | 1985 |
|
SU1393761A1 |
| Устройство для улавливания ленты конвейера в случае ее обрыва | 1987 |
|
SU1467005A1 |
| Автоматическая линия формирования садки кирпича на печной вагонетке | 1983 |
|
SU1178604A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2755358C1 |
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |
1. ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО, преимущественно для мягких контейнеров, содержащее корпус, состоящий из двух щек, размещенные между ними зажимные подвижные один относительно другого стержни, кинематически связанные с кривошипно-шатунными механизмами, соединенными валом, размещенным между щеками, о тличающееся тем, что, с целью повьппения надежности, оно снабжено закрепленными на валу кривощипов противовесами, подпружиненным относительно корпуса грузовым .стержнем с проушиной и приспособлением для фиксации противовесов, при этом шатуны выполнены с пазами, в которых расположены концы одного из зажимных стержней. 2.Устройство по п. 1, отличающееся тем, что противовесы соединены штангой, а грузовой стержень снабжен толкателем. 3.Устройство по п. 1 и 2, о тличающееся тем, что приспособление для фиксации противовесов представляет собой размещенную на корпусе защелку. 4.Устройство по 1, отличающееся тем, что приспособление для фиксации противовесов представляет собой стопорньш рычаг, одно плечо которого шарнирно соединено с корпусом, а другое - с грузовым стержнем.
| Патент США № 4226458, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
