CAD ел
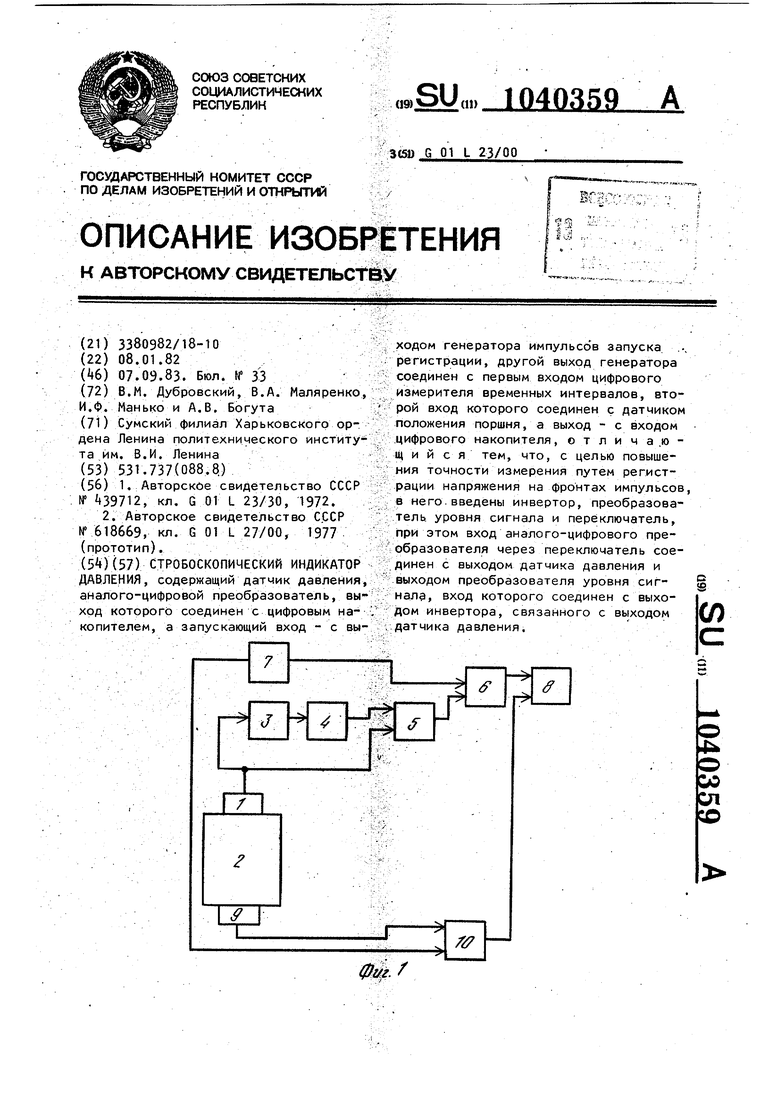
:о Изобретение относится к приборостроению, в частности, к устройствам для записи индикаторного процесса и ДРУГ14Х периодических процессов поршневых двигателей, насосов и комп рессоров (изменений давлений и температур в системах, движения йапорных органов клапанов и т.д.). Известен стробоскопический индикатор, включающий датчик равенства измеряемого и компенсирующего давлений, установленный в цилиндре порш невой машины, цифровой дискретный да чи к угла поворота вала машины, цифровой манометр и блок записи. Цифровой дискретный датчик угла поворот и цифровой манометр, выполняющие фун ции цифрового преобразователя, соединены посредством ключей через блок задержек и промежуточную память с бл ком записи (цифровым накопителем). Ключи, блок задержек и промежуточная память согласуют (синхронизируют потоки информации (сигналы) от цифро вого датчика угла поворота вала и цифрового манометра, соединенного с дат чиком равенства давлений ij . Недостатком известного устройства является невозможность записи высокочастотных подробностей индикаторного процесса, так как из-за ограниченной разрешающей способности датчи ка положения число регистрируемых ординат сигнала с разными координатами положения в статистической диаграмме обычно не превышает . Наиболее близким к предлагаемому по технической сущности и достигаемому результату является стробоскопический индикатор давления, установ ленный на поршневом компрессоре. Индикатор содержит датчик давления , соединенный с аналого-цифровым: преобразователем (АЦП), выход которо го соединен с цифровым накопителем, а запускающий вход - с выходом генератора импульсов запуска регистрации другой выход которого соединен с пер вым входом цифрового измерителя време нных интервалов, второй вход которого соединен с датчиком положения поршня, а выход - с входом цифрового накопителя И. Недостатком указанного индикатора используемого при несинхронной цифровой регистрации периодических быстроизменяющихся процессов, является наличие динамических ошибок, имеющих место на фронтах изменения сигнала при скоростях больших, чем скорость уравновешивающего напряжения. Это происходит из-за того, что АЦП при измерении сигнала затрачивает определенное , время на сам процесс измерения. Эта затрата времени может быть обобщенно учтена, например, скоростью изменения эталонного линейно возрастающего уравновешивающего напряжения АЦП, и поэтому при сигнале, скорость изменения положительных фронтов которого больше скорости, изменения эталонного напряжения АЦП, имеют место динамические погрешности. Цель изобретения - повышение Точности измерения путем регистрации напряжения на фронтах импульсов. Поставленная цель достигается тем, что в стробоскопический индикатор давления, содержащий датчик давления, АЦП выход которого соединен с цифровым накопителем, а запускающий вход с выходом генератора импульсов запуска регистрации, другой выход генератора соединен с первым входом цифрового измерителя временных интервалов, второй вход которого соединен с датчиком положения поршня, а выходс входом цифрового накрпителя, введены инвертор, преобразователь уровня сигнала и переключатель, при этом вход АЦП через переключатель соединен с выходом датчика давления и выходом преобразователя уровня сигнала, вход которого соединен с выходом инвертора, связанного с выходом датчика давления. На фиг. 1 приведена схема стробоскопического индикатора давления; на фиг. 2 - диаграммы,поясняющие его работу. Индикатор давления содержит д-атчик 1 давления, установленный на поршневой машине 2, инвертор 3, преобразователь t уровня , переключатель 5, АЦП 6, генератор 7 импульсов запуска регистрации, цифровой накопитель 8, датчик 9 положения поршня и цифровой измеритель 10 временных интервалов. Индикатор давления работает слеующим образом. При индицировании ординаты прямого аналого-периодического сигнала от атчика 1 давления, установленного а поршневой машине 2 и включенного своим выходом через переключатель 5
на.вход АЦП 6, преобразуются последним при импульсах генератора7 импульсов запуска регистрации в цифро вой код и записываются в цифровом коде в накопителе 8. Сигнал от датчика 9 положения поршня запускает цифровой измеритель 10 временных интервалов, ближайший импульс генератора импхяьсов запуска регистрации прекращает регистрацию и.дает разрешение на запись измеренного времени (фазы) от момента появления сигнала датчика 9 положения поршня до момента импульса запускарегистрации в цифровой накопитель 8. В накопителе 8 запись фазы между сигналом датчика Э положения поршня и ближайшим импульсом генератора импульсов запуска регистрации 7 определяет начало цикла. При чем фазы при записи периодического сигнала различны от цикла к циклу.
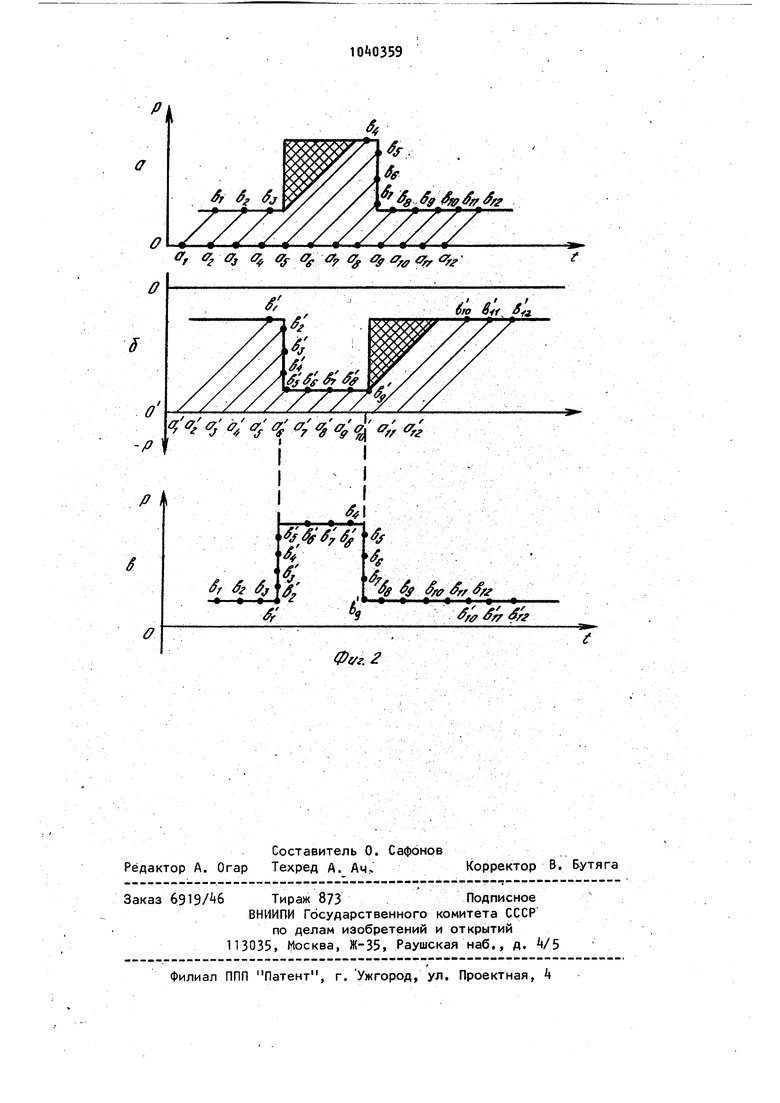
Количество зарегистрированных ординат сигнала с разными координатами времени может быть очень большим, что показано на фиг. 2, где изображен сигнал в виде периодичеЪки следующих прямоугольных импульсов, фрвнты которых имеют скорость изменения по абсолютной величине больше, чем скорость, изменения уравновешивающего напряжения АЦП, в данном случае изменяющегося линейно. Моменты запуска АЦП обозначены а ,ал, ао,.. с,, а,.,а.|, а, а моменты регистрации Ь ,... ,b,g,b|,,b,2 .
Прямой сигнал показан на фиг. 2а. На переднем фронте этого сигнала
имеется участок с полным отсутствием моментов регистрации, хотя моменты запуска по времени распределены равномерно.
После изменения положения переключателя 5 выход датчика 1 давления отключается от АЦП 6 и подключается к входу инвертора 3, который выходом соединяется с входом п|5еобразователя А уровня сигнала, выход которого через переключатель 5 подключен к АЦП 6. Инвертированный и сдвинутый в рабочий диапазон сигнал регистрируется в цифровом накопителе 8 аналогично описанному выше. Для этого сигнала участок с полным отсутствием моментов регистрации расположен на заднем фронте (фиг. 2б). Регистрируемые инвертированные ординаты инвертируются в кодах цифрового накопителя 8 еще раз и накладываются на коды прямого сигнала. Результаты показаны на фиг. 2в, где совмещены отсчеты прямого и инвертированного сигналов. Данные отсчеты расположены равномерно на фронтах сигналов, что уменьшает динамические погрешности регистрации.
Преимущество предлагаемого индикатора по сравнению с прототипом заключается в том, что уменьшаются динмические погрешности регистрации на фронтах изменения сигнала при скоростях больших, чем скорость уравновешивающего напряжения АЦП.
0
ff
.4 f
6tO Sff Sf3
| название | год | авторы | номер документа |
|---|---|---|---|
| Стробоскопический индикатор давления | 1983 |
|
SU1174801A2 |
| Стробоскопический индикатор давления | 1987 |
|
SU1571454A1 |
| Стробоскопический индикатор давления | 1977 |
|
SU618669A1 |
| Устройство для сейсмоакустических зондирований на акваториях | 1987 |
|
SU1427316A1 |
| ЦИФРОВОЙ РЕГИСТРАТОР ПЕРЕХОДНЫХ ПРОЦЕССОВ | 1990 |
|
RU2029310C1 |
| Устройство для индицирования двигателя внутреннего сгорания | 1978 |
|
SU785665A1 |
| Стробоскопический индикатор давления | 1978 |
|
SU665222A2 |
| Устройство для измерения электромагнитных параметров объемных экранов | 1983 |
|
SU1228150A1 |
| Цифровой стробоскользиметр и вычитающее устройство с цифровой индикацией | 1983 |
|
SU1257523A1 |
| Устройство для измерения расстояния до места повреждения линий электропередачи и связи | 1984 |
|
SU1247793A1 |
Фуг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматический питатель для бегунной чащи | 1933 |
|
SU39712A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Стробоскопический индикатор давления | 1977 |
|
SU618669A1 |
