Работа электромагнитных реле в системах автоматического контроля и регулирования имеет ряд особенностей, предъявляющих к таким реле дополнительные специфические требования.
Эти особенности обусловлены тем, что изменение контролируемого или регулируемого параметра обычно происходит не скачкообразно, а плавно, соответственно чему изменяется и электрический сигнал в датчике.
Это приводит к тому, что ток в обмотке реле нарастает постепенно до порога срабатывания реле, а после срабатывания изменяется незначительно.
Для надежной работы реле необходимо, чтобы срабатывание реле происходило скачком, без плавного перемещения подвижных контактов, и чтобы уже на пороге чувствительности системы обеспечивалось достаточное контактное давление, во избежание ложных срабатываний и износа контактов..
Это особенно важно при работе реле в фазочувствительных выпрямительных и усилительных схемах, что является типичным для автоматических схем контроля и регулирования,
где, наряду с постоянной составляющей тока, присутствует переменная составляющая и где несоблюдение указанного требования может привести к вибрации контактов, что недопустимо. Это необходимо также при работе реле в условиях вибрации. В фазочувствительных схемах реле должно реагировать не только на величину, но п на полярность управляющего сигнала.
При работе реле в дифференциальных схемах требуется, чтобы реле не реагировало па начальное значение тока в плечах схемы, а реагировало на разность токов.
В пред.лагаемом электромагнитном поляризованном реле с трехстержневым сердечником, на среднем стержне которого, несундем управляющую обмотку, расположен поворотный якорь, учтены указанные выще особенности применения реле в системе автоматического управления и регулирования.
Особенностью предлагаемого реле является наложение поляризующей обмотки только на один из крайних стержней трехстержневого сердечника, чем обеспечивается срабатывание реле лищь при одной полярности
управляющего сигнала, возврат якоря без помощи пружины в исходное положение после отключения управляющей обмотки, уменьщение за счет полного замыканпя магнитной цепи величины намагничивающей силы удержания якоря в рабочем положении и более резкий перевод его из одного крайнего положения в другое.
Особенностью реле является также применение двух управляющих обмоток, наложенных на средний стержень сердечника, чем обеспечивается возможность использования реле в дифференциальных схемах.
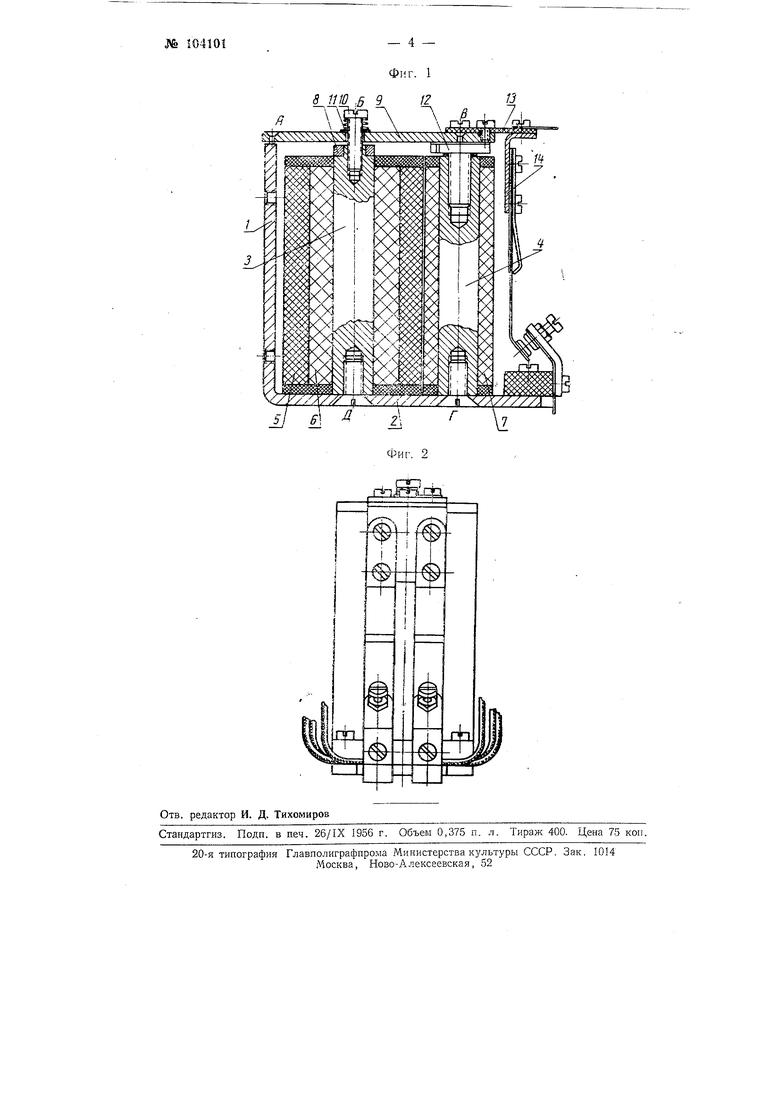
На фиг. 1 предлагаемое реле показано в разрезе; на фиг. 2 дан вид реле сбоку.
Реле имеет трехстержневой сердечник. Стержень / образован отогнутым вверх Кронщтейиом основания 2, к которому привинчены два других стержня и . На среднем стержне 3 расположены две управляющие обмотки 5 и 6, на стержне 4 - поляризующая обмотка 7. На верхнем конце среднего стержня 3 укреплена призма 8, на острие которой качается поворотный якорь 9 реле (на чертеже показан разрез средней части призмы, где призма в верхней своей части имеет выточку). Якорь 9 удерживается на призме 8 при помощи винта iO и пружинки 11. Для предупреждения возможности поворота якоря вокруг винта с нижней стороны якоря сделана канавка (на чертеже не показана), в которую входит острие призмы. Длина призмы равна щирине якоря.
В верхней части стержня 4 имеется специальный винт 12 с расширенной головкой, выполняющей функции полюсного наконечника. К якорю 9 через изоляционную пластинку 13 прикреплена- подвижная контактная группа 14.
При отсутствии тока в обмотках 5 и б и при пропускании через поляризующую обмотку 7 постоянного (или пульсирующего) тока якорь 9 реле гаритягивается к винту 12 стержня .4.
При подаче в какую-либо из управляющих обмоток 5 или 6 тока
одного направления так, что намагничивающие силы, создаваемые ампервитками управляющей обмотки и поляризующей обмотки 7, оказываются в контуре БВГДБ магнитопровода направленными в одну сторону, якорь реле остается в исходном положении, причем сила притяжения якоря к стержню 4 возрастет.
При обратном направлении тока в управляющей обмотке якорь 9 удерживается в исходном положении до тех пор, пока намагничивающие силы (ампервитки) управляющей и поляризующей обмоток не станут равными друг другу. При дальнейщем незначительном приращении тока в управляющей обмотке, вследствие нарушения равновесия в магнитной системе реле, якорь резко перебрасывается в обратную сторону и прижимается к концу стержня /. При этом магнитная цепь в контуре АБДА магнитопровода полностью замыкается, что соответствует минимальному значению намагничивающей силы, потребной для создания заданного контактного давления.
Так как в новом положении якоря магнитное сопротивление контура АБДА магнитопровода весьма незначительно по сравнению ссопротивлением контура БВГДБ, то действием поляризующей обмотки 7 можно пренебречь. Поэтому можно считать, что в этом положении сила нажатия якоря и контактов определяется ампервитками срабатывания, т. е. ампервитками обмотки 7. Таким образом, сразу же после срабатывания реле имеется возможность, задавая необходимое подмагничивание поляризующей обмотке 7, обеспечить требуемое давление между контактами реле.
Это достигается благодаря тому, что в отличие от обычных реле, где величина противодействующего момента, создаваемого пружиной, растет при срабатывании реле, в предлагаемом реле противодействующий момент, создаваемый ампервитками обмотки 7, при срабатывании резко падает до величины, которой можно перенебречь.
Наличие поляризующей обмотки 7
позволяет очень просто - изменением тока подмагничивания - регулировать порог срабатывания реле и величину контактного давления.
Управляющие обмотки 5 и 6 могут соединяться согласно, встречно или включаться по отдельности в разные цепи.
В частности, при работе реле в дифференциальных фазочувствительных схемах эти обмотки включаются в противоположные плечи схемы таким образом, что намагничивающие силы, создаваемые этими обмотками, оказываются направленными в стержне 3 встречно. При таком включении реле не реагирует на абсолютные значения токов в плечах схемы, а лишь на разность токов, причем одного знака.
Применение двух таких реле обеспечивает три устойчивых рабочих положения (трехпозиционность).
Предмет изобретения
1.Электромагнитное поляризованное реле для систем автоматического контроля и регулирования, имеющее трехстержневой сердечник, на среднем стержне которого, несущем управляющую обмотку, расположен поворотный якорь, от.тичающеес я тем, что, с целью автоматического, без помощи пружины, возврата якоря в исходное положение после отключения управляющей обмотки, уменьщения величины намагничивающей силы удержания якоря в рабочем положении и более резкого перевода его из одного крайнего положения в другое, поляризующая обмотка наложена только на один из крайних стержней сердечника.
2.Электромагнитное реле по п. 1, отличающееся тем, что, с целью использования его в системе с дифференциальным датчиком, применены две наложенные на средний стержень сердечника управляющие обмотки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дифференциальное реле | 1938 |
|
SU56609A1 |
| ЭЛЕКТРОМАГНИТНОЕ ПОЛЯРИЗОВАННОЕ РЕЛЕ ПОВЫШЕННОЙ ЧАСТОТЫ И КОЛИЧЕСТВА СРАБАТЫВАНИЙ | 2003 |
|
RU2248060C1 |
| ПОЛЯРИЗОВАННЫЙ ДВУСТАБИЛЬНЫЙ ДЛИННОХОДОВОЙ ЭЛЕКТРОМАГНИТ СО СДВОЕННОЙ ПОСЛЕДОВАТЕЛЬНОЙ МАГНИТНОЙ ЦЕПЬЮ | 2018 |
|
RU2683575C1 |
| Электромагнитное реле | 1980 |
|
SU928454A1 |
| Поляризованный электромагнит | 2019 |
|
RU2713626C1 |
| Устройство для автоблокировки поездов | 1932 |
|
SU32540A1 |
| Электромагнитное реле | 1981 |
|
SU1001217A1 |
| Промежуточный быстронасыщающийся трансформатор для дифференциальной защиты силовых трансформаторов | 1949 |
|
SU96284A1 |
| Устройство для дифференциальной токовой защиты трансформатора | 1978 |
|
SU858164A1 |
| Датчик виброперемещений | 1990 |
|
SU1714330A1 |