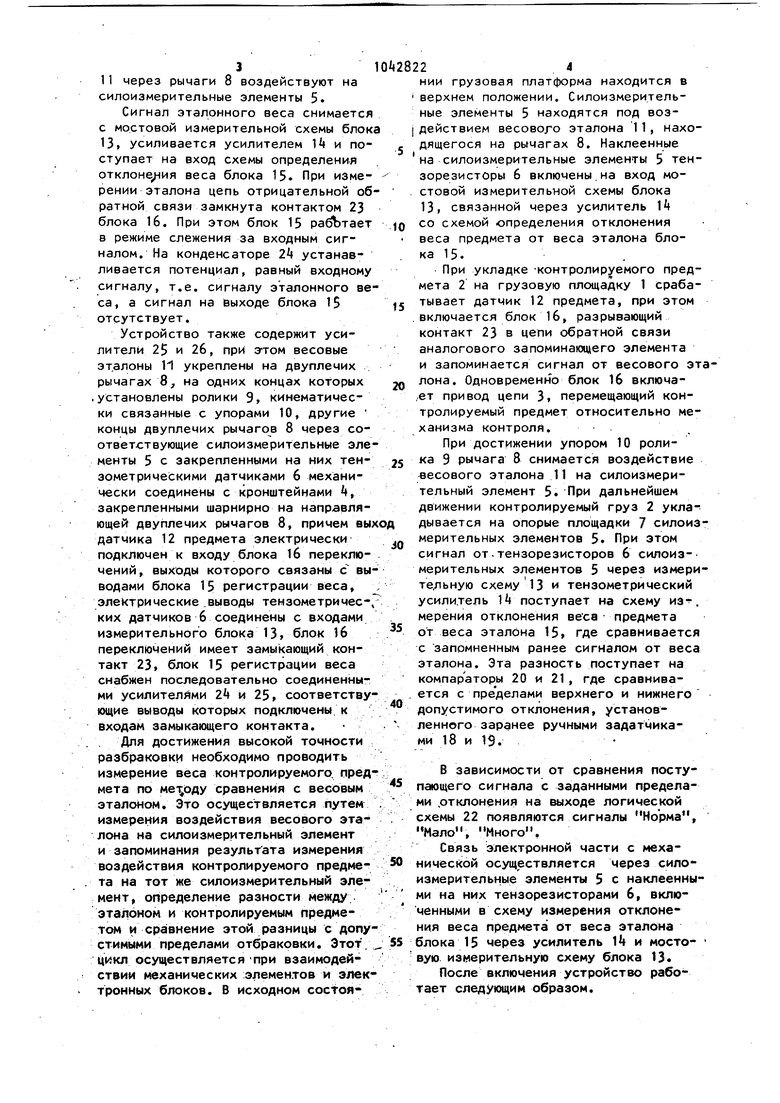
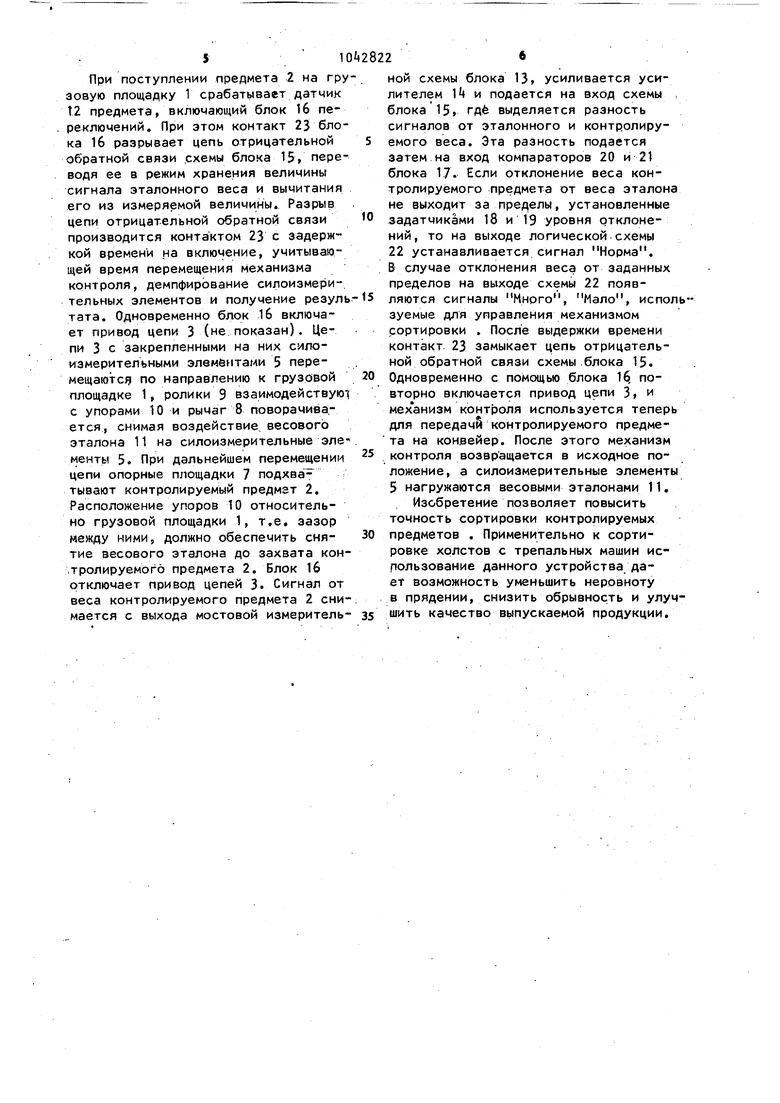
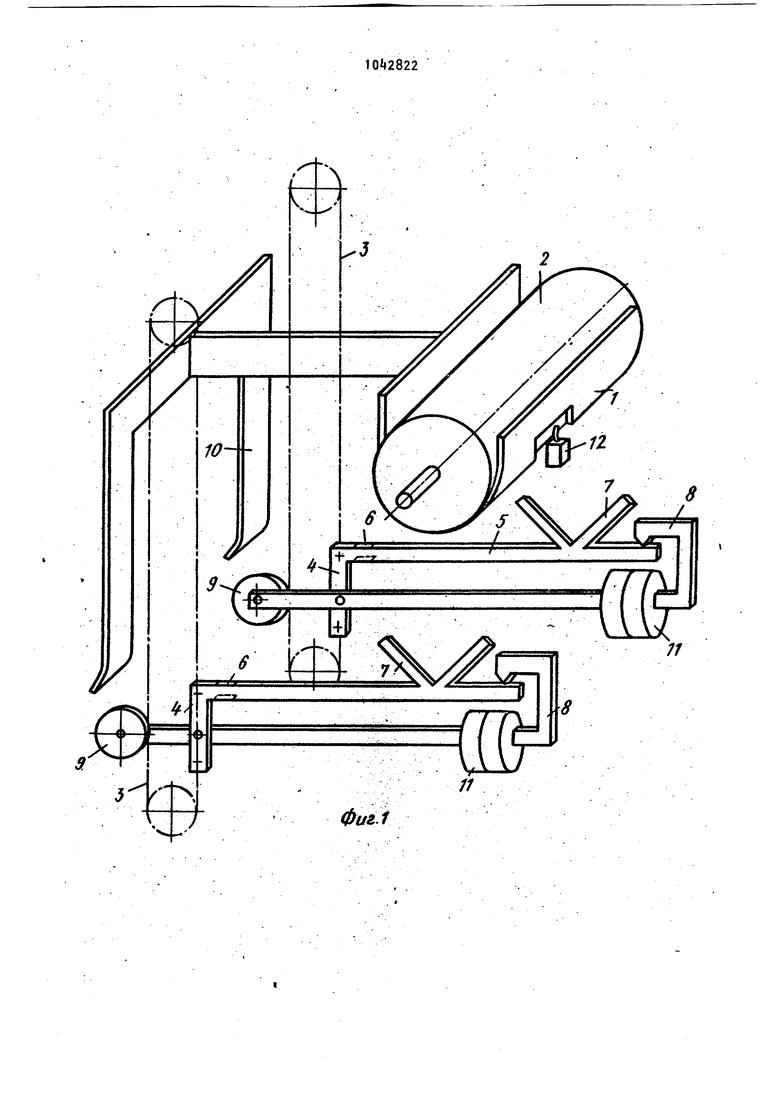
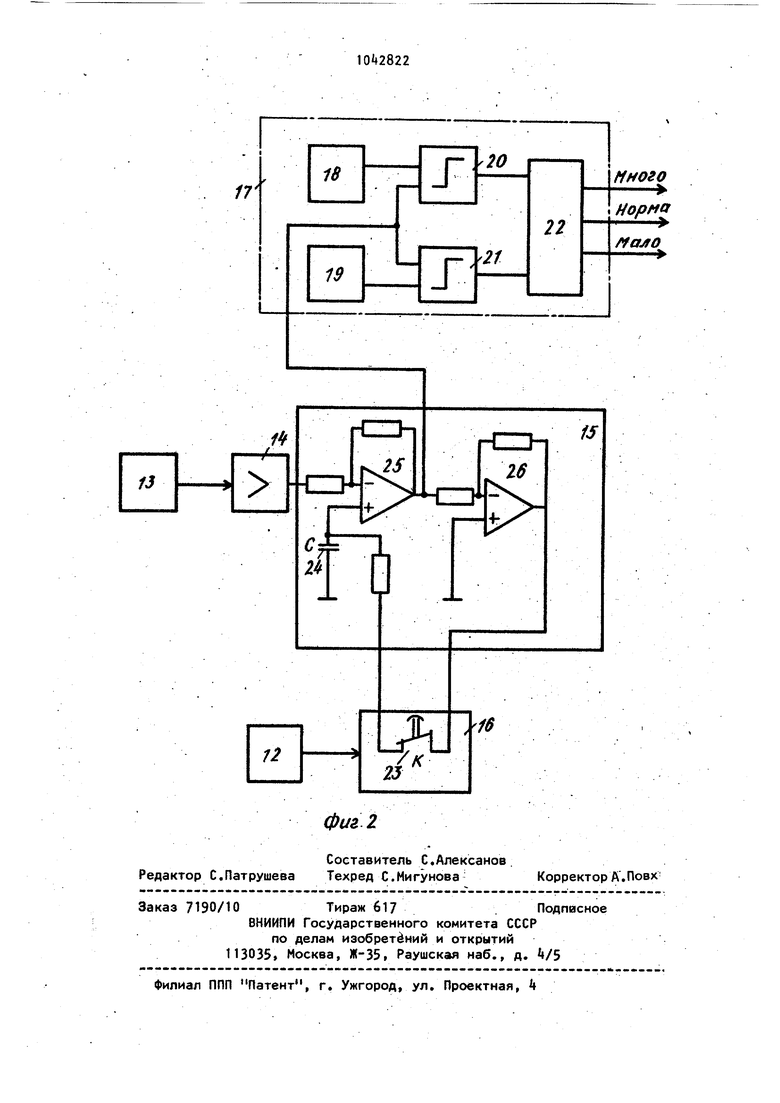
Изобретение относится к устройствам для сортировки предметов по Известно устройство для сортировки предметов по весу, содержащее грузовую площадку, механически связанную с механизмом контроля с сило измерительными элементами и весовым эталоном, тензометрические датчики, электрически связанные черезизмерительный блок и усилитель с блоком регистрации веса, подключенным к со тирующему блоку tl J. Недостатком мзвестного устройств является невысокая точность сортиро ки. Цель изобретения -. повышение точ ности сортировки. . Поставленная цель достигается тем, что устройство для сортировки предметов по весу, содержащее грузовую площадку, механически связанную с механизмом контроля с силоизм рительными элементами и весовь1м эта лоном, тензометрические датчики, электрически связанные через 1 змерительный блок, и усилитель, с блоко регистрации веса, подключенным k со тирующему блоку,имеет датчик предмета установленный на грузовой площадке, блок переключений, а механизм контроля снабжен упорами, механически связанными с грузовой площадкой, ро ликами, двуплечими рычагами, кронштейнами, укрепленными на силбизмерительных элементах, и опорными площадками, при этом весовые эталоны укреплены на двуплечих рычагах, на одних концах которых установлены ролики, кинематически связанные с упорами, другие концы двуплечих рычагов через соответствующие силоизмерительные элементы с закрепденными на них тензометрическими датчиками механически соединены с кронштейнами, закрепленными шарнирно на.направляющей двуплечих рычз гов, причем выход датчика предмета электрически подключен к входу блок переключений, выходы которого связа ны с выводами блока регистрации веса, а электрические выводы тензометрических датчиков соединены с вх дани измерительного блока. Блок переключений имеет замыка ющий контакт, а блок регистрации ве са снабжен последовательно соединен ными усилителями, соответствующие 22 выводы которых подключены к входам замь1кающего контакта. На фиг. Г изображена схема механизма контроля в исходном положеНИИ; на фиг. 2 - структурнаЬ схема электронной системы устройства. Устройство для сортировки предметов по весу состоит из грузовой площадки 1 для приёма контролируемого предмета 2, установленной в исходном положении над механизмом контроля, содержащем две вертикально замкнутые цепи 3 с жестко закрепленными на них кронштейнами 4 с силоизмерительными элементами 5. На силоизмерительных элементах 5наклеены с двух сторон тензометрические датчики (тензорезисторы) 6и размещены опорные площадки 7 для контролируемого предмета 2. На кронштейнах k механизма контроля шарнирно смонтированы двуплечие рычаги 8, взаимодействующие одним плечом с консолью силоизмерительного элемента, а другим плечом через ролики 9 с упорами 10, жестко связанными с грузовой площадкой 1, Упоры 10 установлены по отношению к рычагам 8 с зазором, меньшим чем °Р между опорными площадками 7 и контролируемым предметом. На рычагах 8 установлены весовые эталоны 11. Под грузовой площадкой 1 установлен датчик 12 предмета. Две пары тензорезйсторов 6 образуют мостовую измерительную схему измерител.ьного блока 13 связанную с усилителем I, выход которого соединен с входом схемы определения отклонения веса предмета от веса эталона блока 15 регистрации веса, выполненную в виде аналоговой запоминающей схемы с коммутируемой цепью отрицательной обратной связи. Схема определения отклонения веса пред(ета блока; 15 связана с блоком 16 переключения и сортирующим блоком 17, содержащим задатчики верхнего и нижнего уровня отклонений 18 и 19, компараторы 20 и 21, схему 22. Цепь отрицательной обратной связи аналоговой запоминающей схемы связана с замыкающим контактом 23 блока 16 переключений, управляемого датчиком 12 предмета с задержкой по времени. 6 исходном состоянии механизм контроля находится под грузовой плоч адкой 1, при этом весовые эталону 11 через рычаги 8 воздействуют на силоизмерительные элементы 5. Сигнал эталонного веса снимается с мостовой измерительной схемы блок 13, усиливается усилителем 1 и поступает на вход схемы определения отклоне/1ия веса блока 15. При измерении эталона цепь отрицательной об ратной связи замкнута контактом 23 блока 16. При этом блок 15 рабЬтает в режиме слежения за входным сигналом. На конденсаторе 2Ц устанав ливается потенциал, равный входному сигналу, т.е. сигналу эталонного ве са, а сигнал на йыходе блока 15 отсутствует. Устройство также содержит усилители 25 и 26, при э-том весовые эталоны 11 укреплены на двуплечих рычагах 8, на одних концах которых .установлены ролики 9, кинематически связанные с упорами 10, другие концы двуплечих рычагов 8 через соответствующие силоизмерительные эле менты 5 с закрепленными на них тензометрическими датчиками 6 механически соединены с кронштейнами , закрепленными шарнирно на направляющей двуплечих рычагов 8, причем вы датчика 12 предмета электрически подключен к входу блока 1б переключений, выходы которого связаны с вы водами блока 15 регистрации веса, электрические .выводы тензометрических датчиков 6 соединены с входами измерительного блока 13, блок 16 переключений имеет замыкающий контакт 23, блок 15 регистрации веса снабжен последовательно соединенными усилителями 2 и 25, соответству ющие выводы которых подключены, к входам замыкающего контакта. . Для достижения высокой точности разбраковки необходимо проводить измерение веса контролируемого, пред мета по сравнения с весовым эталоном. Это осуществляется путем измерения воздействия весового эталона на силоизмерительный элемент и запоминания результата измерения воздействия контролируемого предмета на тот же силоизмерительный элемент, определение разности Между . эталоном и контролируемым предметом и сравнение этой разницы с допу стимыми пределами отбраковки. Этот цикл осуществляется при взаимодействии механических элементов и элек тронных блоков. В исходном состоя2грузовая платформа находится в верхнем положении. Силоизмерительные элементы 5 находятся под воздействием весового эталона 11, находящегося на рычагах 8. Наклеенные на силоизмерительные элементы 5 тензорезисторы 6 включены.на вход мостовой измерительной схемы блока 13, связанной через усилитель 14 СО схемой определения отклонения веса предмета от веса эталона блока 15. При укладке -контролируемого предмета 2 на грузовую площадку 1 срабатывает датчик 12 предмета, при этом включается блок 16, разрывающий контакт 23 в цепи обратной связи аналогового запоминающего элемента и запоминается сигнал от весового эталона. Одновременно блок 16 включа..ет привод цепи 3, перемещающий контролируемый предмет относительно механизма контроля. При достижении упором 10 ролика 9 рычага 8 снимается воздействие весового эталона 11 на силоизмерительный элемент 5. При дальнейшем движении контролируемый груз 2 укладывается на опорые площадки 7 силоизмерительных элементов 5. При этом сигнал от-тензорезисторов 6 силоизмерительных элементов 5 через измерительную схему 13 и тензометрический усили.тель 14 поступает на схему из-. мерения отклонения веса предмета от веса эталона 15, где сравнивается с запомненным ранее сигналом от веса эталона. Эта разность поступает на компараторы 20 и 21, где сравнивается с пределами верхнего и нижнего допустимого отклонения, установленного заранее ручными задатчиками 18 и 1Э. В зависимости от сравнения поступающего сигнала с заданными пределами .отклонения на выходе логической схемы 22 появляются сигналы Норма, Мало, Много, Связь электронной части с механической осуществляется через силоизмерительные элементы 5 с наклеенными на них тензорезисторами 6, включенными в схему измерения отклонения веса предмета от веса эталона блока 15 через усилитель И и мосто- вую измерительную схему блока 13. После включения устройство работает следующим образом. 5 1 При поступлении предмета 2 на гру зовую площадку 1 срабатывает датчик Т2 предмета, включающий блок 16 пе. реключений. При этом контакт 25 блока 16 разрывает цепь отрицательной обратной связи рхемы блока 15, переводя ее в режим хранения величины сигнала эталонного веса и вычитания его из измеряемой величины. Разрыв цепи отрицательной обратной связи производится контактом 23 с задержкой времени на включение, учитывающей время перемещения механизма контроля, демпфирование силоизмери-, тельных элементов и получение резуль тата. Одновременно блок 1б включает привод цепи 3 (не показан). Цепи 3 с закрепленными на них силоизмерительными элембнтами 5 перемещаютс по направлению к грузовой площадке 1, ролики 9 взаимодействую с упорами 10 и рычаг 8 поворачивается, снимая воздействие, весового эталона 11 на силоизмерительные эле менты 5. При дальнейшем перемещении цепи опорные площадки 7 подхва тывают контролируемый предмет 2. Расположение упоров 10 относительно грузовой площадки 1, т.е. зазор между ними, должно обеспечить снятие весового эталона до захвата кон .тролируемого предмета 2. Блок 16 отключает привод цепей 3. Сигнал от веса контролируемого предмета 2 снимается с выхода мостовой измеритель2НОЙ схемы блока 13, усиливается усилителем И и подается на вход схемы , блока 15, где выделяется разность сигналов от эталонного и контролируемого веса. Эта разность подается затем на вход компараторов 20 и 21 блока 17. Если отклонение веса контролируемого предмета от веса эталона не выходит за пределы, установленные задатмиками 18 и 19 уровня отклонений , то на выходе логической схемы 22 устанавливается сигнал Норма. В случае отклонения веса от заданных пределов на выходе схемы 22 появляются сигналы Много, Мало, используемые для управления механизмом сортировки . После выдержки времени контакт 23 замыкает цепь отрицательной обратной связи схемы блока 15. Одновременно с помощью блока 1 повторно включается привод цепи 3 и механизм контроля используется теперь для передачи контролируемого предмета на конвейер. После этого механизм контроля возвращается в исходное положение, а силоизмерительные элементы 5 нагружаются весовыми эталонами 11. Изобретение позволяет повысить точность сортировки контролируемых предметов . Применительно к сортировке холстов с трепальных машин использование данного устройства дает возможность уменьшить неровноту в прядении, снизить обрывность и улучшить качество выпускаемой продукции.
18
20
г
Много
22
Г1ало
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА АВТОМОБИЛЯ | 2000 |
|
RU2179306C1 |
| СПОСОБ СОЗДАНИЯ КОНТРОЛИРУЕМОЙ СИЛЫ ПРИ ПРОВЕРКЕ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2530786C1 |
| Автоматические конвейерные весы с цифровым управлением | 1986 |
|
SU1359681A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| Контрольно-весовой автомат для отбраковки штучных грузов различной конфигурации | 1972 |
|
SU482632A1 |
| Весы для взвешивания слитков | 1985 |
|
SU1290084A1 |
| Прибор для контроля пружин | 1990 |
|
SU1778504A1 |
| МОНОРЕЛЬСОВЫЕ ВЕСЫ | 1992 |
|
RU2057302C1 |
| Устройство для взвешивания непрерывно движущихся подвесных грузов | 1978 |
|
SU679813A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
1. УСТРОЙСТВО ДЛЯ СОРТИРОБКИ ПРЕДМЕТОВ ПО ВЕСУ, содержащее грузовую площадку, механически связанную с механизмом контроля с силоизмерительными элементами и V весовым эталоном, тензометрические датчики, электрически связанные через измерительный блок, и усилитель с блоком регистрации веса, подключенным к сортирующему блоку, отличающееся тем, что, с целью повышения точности сортировки, оно имеет датчик предмета, установленный на грузовой площадке, блок переключений, а механизм контроля снабжен упорами, механически .связанными с грузовой площадкой, роли-. ками, двуплечими рычагами, кронштейнами, укрепленными на силоизмерительных элементах, и опорными площадка ми, при этом весовые эталоны укреплены на двуплечих рычагах, на одних концах которых установлены ролики, кинематически связанные с упорами, другие концы двуплечих рычагов через соответствующие силоизмерительные элементы с закрепленными на них тензометрическими датчиками механически соединены с кронштейнами, закрепленными шарнирно на направляющей двуплечих рычагов, причем выход датчика предмета электрически подключен i к входу блока переключений, выходы которого связаны с выводами блока (Л С регистрации веса, а электрические выводы тензометрйческих датчиков соединены с входами измерительного блока. 2. Устройство по п. 1, отличающееся тем, что блок переключений имеет замыкающий контакт, ю а блок регистрации веса снабжен последовательно соединенными усилите-, 00 лями, соответствующие ёыводы которых, to ю подключены к входам замыкающего контакта. .