Изобретение относится к производству средств автоматической отбраковки иггучиых грузов ио весу и разделения их иа три категории: «Недовес, «Перевес, «Норма и, в частности, для отбраковки жестяных консервных банок, занолненных продуктом.
Известно устройство для автоматической отбраковки предметов по весу, содержаи1ее два синхронно движуи1,ихся траиспортсра с захватами, весоизмерительную головку, снабжеииую датчиком положения, связанным с аррегиром. Силоизмерительный элемент головки выполнен в виде упругой консольной балки с тензометрическими датчиками, включенными в мостовые схемы. Устройство снабжено электронным блоком, содержащим два нуль-органа и логическую схему. Съем сигнала производится после успокоеиия весовой системы, т. е. в конце переходного процесса.
Однако такое устройство не обеспечивает достаточной точности отбраковки и имеет сложную конструкцию.
Предлагаемый контрольно-весовой автомат снабжен блоком преобразования силы веса в перемещение, соединенным с блоками преобразования перемещения в пневматические аналоговые сигналы, к которым подключены блоки преобразования аналогового сигнала в дискретный сигнал отбраковки и старт-стопной системы синхронизации и управления.
Благодари этому повышается точность отораковкн н унропщстся схема управления.
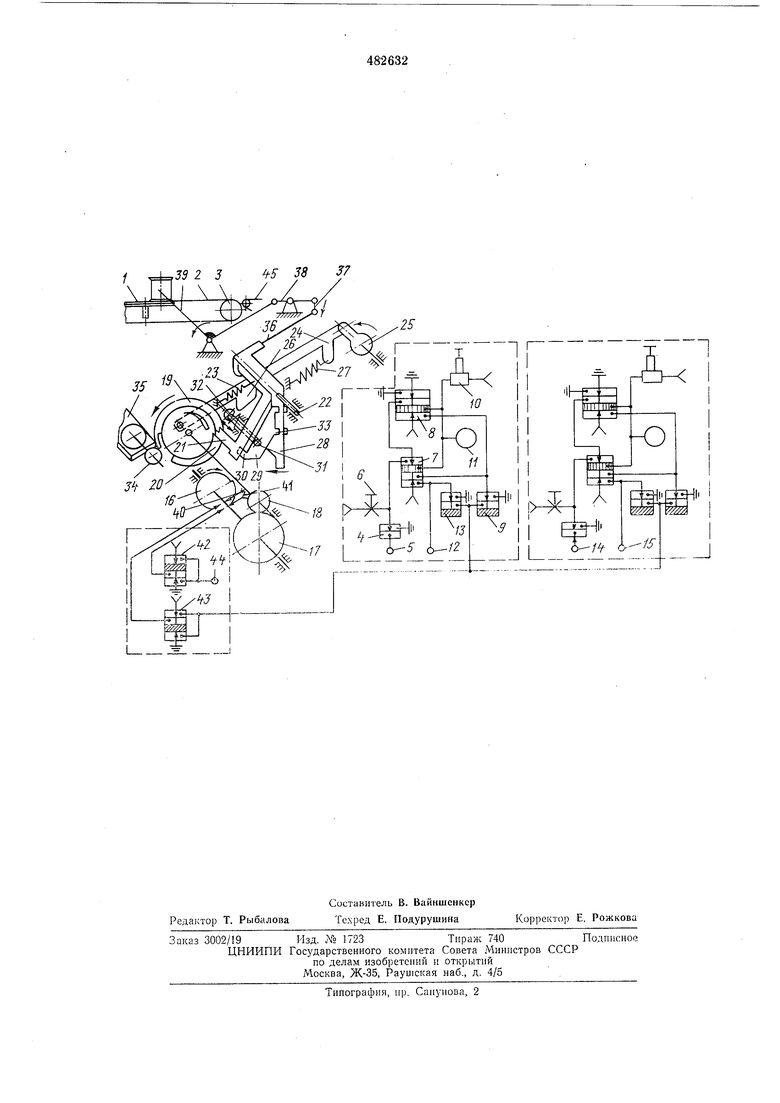
На чертеже показана схема контрольно-весового автомата. Блок преобразования силы веса в перемещение содержит весовую платформу , установленную под лентой 2 транспортера 3 и связанную через систему стоек н планок с блоками преобразова)1ия .перемещения в аналогог ые пневматические сигналы, подключен ые к дву.м блокам-преобразозателям аналогового сигнала в дискретный сигнал отбраковки. Б.чоки-нреобразователн аналогового сигнала в дискретный сигнал отбраковки выполняют функдни контроля «Недовес и «Перевес.
Блок «Недовес состоит из пневматического повторителя усилителя 4 давлення, к щтунеру 5 KOTOpoio подводится аналоговый выход1 ой сигнал от штуцера преобразователя хода в пневматический сигнал, переменного дросселя 6, реле 7 в котором проходипя камера и сонло сосдннены с дальней относительно питающего сонла камерой сравнения точного элемента 8 сравнения. Выход элемента 8 с ближией относительно питающего сонла ка) мерой сравиення п)1евмореле 7 и соплом разрядиого клаиана 9, а задатчик 10 вместе с емкостью 11 связаны с нротнвоположным камерами реле 7 н элемента 8. Штуцер 12 от реле 7 подключается к исполнительному ме.ханизму бракующего устройства канала «Недовес и с соплом другого разрядного клапана 13. Камеры клапанов 9, 13, а также оставшееся сопло и камера элемента 8 сообщены с атмосферой.
В блоке «Перевес к щтуцеру 14 подключен штуцер «Перевес преобразователя хода в пневматический сигнал. Штуцер 15 подсоединен к исполнительному механизму бракующего устройства канала «Перевес. Блок стартстопной системы синхронизации и управления контрольно-весовой системой содержит пневмомеханический преобразователь угла поворота профильного кулака 16 в пневматические сигналы управления, связанного через ujecTepни 17, 18 с шестерней 19 с неполным числом
зубьев. На торце шестерни 19 имеется профильный упор 20, зацепляющийся с подпружиненным стопором 21, свободно качающимся на оси 22 и замкнутый пружиной 23. Шатун 24 шарнирно и эксцентрично относительно оси вращения посажен одиим концом на И1естерне 19, а другим - на кривощиие 25. Шатун 24 несет также кулак 26 и пружину 27, замыкающую кинематическую пару. Па ось 22 насажен рычаг 29, на боковой повер.хности которого размещено поворотное коромысло 29 с упором 30. Коромысло имеет кинематический контакт с упором 20 и с осью 31, которая замкнута пружиной 32.
Коромысло 29 имеет возможность поворачиваться вокруг вертикальной оси на своих двух нетлях 33, нз-за смещенности которых оно всегда стремится прижаться к оси 31. Шестерня 19 может быть введена в зацепление с непрерывно вращающейся шестерней 34, с дящей на валу синхроиного электропривода 35, путем вывода ее из зацепления со стопором 21, с помощью коромысла 29, находящегося на рычаге 28, связанном и совершающем возвратно-качательиое движение от системы рычагов 36, 37, 38, 39, контролируюи их наличие банок на транспортере 3. Соила 40, 41 управляют соответственно включением арретира н разрядкой схемы с помощью иневмореле 42, 43. Штуцер 44 подключается к штуцеру арретира.
Блок орга)П130ванной нодачм банок на взвещивание состоит из двух иоследовательпо установленных ленточных транспортеров 45 и 3. Лента 2 транспортера 3 скользит но весовой платформе 1 со скоростью, большей, чем у транспортера 45. Это обеснечивает поступление банок на платформу с требуемым гиагом.
Контрольно-весовой автомат работает следующим образом.
От дозирующей машины консервные банки с постоянным шагом поступают иа подаю1ций транспортер 45. Благодаря несколько большей скорости транспортера 3 банки поступают иа весовую платформу I по одной с гарантированным щагом. Отклонив рычаг 39 через систему рычагов 33-36, рычаг 28 поворачивается вокруг оси 22. При этом коромысло 29 также поднимется и своим упором 30
выводит из зацепления стопор 21 с шестерней 19. Шатун 24 за счет усилия пружины 27 поворачивает шестерню 19 и вводит ее в зацепление с ненрерывно вращающейся шестерней 34, сидящей на оси электронривода 35. При этом шестерня 19 повернется ровно на один оборот. Одновременно шатун 24 своим кулаком 26 воздействует на ось 31, которая выводит из контакта упор 30 коромысла 29 со стопором 21. При обратном ходе шатуна 24 пружина 32 возвращает ось 31 в исходное состояние. А стопор 21 за счет действия пружины 23 окажется в это время уже снизу, вне действия упора 30. Данная система решает
проблему единичного включения независимо от времени контакта банки со щупом. Для повторного срабатывания необходимо, чтобы коромысло вернулось в исходное состояние, а уиор 30 встал под стопор 21. Это происходит
при движении иазад коромысла. Коромысло отклоняется на нетлях 33 и заскакивает упором 30 под стопор 21.
Действие кулака 26 рассчитано таким образом, чтобы к моменту окончания поворота
шестерни 19 коромысло 29 своим упором 30 было выведено из зацепления со стопором 21 и последиий вернулся в исходное состояние. Тогда шестерня 19 упором 20 набегает на стопор 21, входит в зацепление с шестерней 19
и останавливается.
В момент поворота шестерни 19 через систему шестерен 17, 18 происходит поворот кулака 16, программирующего цикл контроля веса: включение арретира в момент времени
«Старт, выключение арретира в дальнейщем и разрядка схем контроля веса в период времени «Стон. При своем вращении профильный кулак 16 пересекает воздушные струи соила 40 и с помощью реле 42 воздух под давлением через штуцер 44 поступает через соответствующий штуцер в камеру арретира. Срабатывает арретир, шток отпускает скалку н преобразователе силы веса в перемещение. Предварительно, преобразователь силы веса в перемещение настраивается так чтобы вес упаковки, равный «норма-номинал, компенсировался рычажной весовой и пружинной системами. В этом случае весовая подвеска остается в равновесии.
Одновременио работа пневматического преобразователя перемещения в аналоговый сигнал иастраивается так, чтобы сигнал на выходе отсутствовал. Поступивщая на платформу I банка с весом равным «Недовес либо «Перевес перемещает подвижную систему вверх либо вниз, воздействуя на шарики в измерительных соп;iax.
Пневматический преобразователь перемеще шя в снгнал отрабатывает аналоговый сигнал, отображающий колебательный закон движения весовой платформы.
Аналоговый сигиал поступает в усилитель 4 через штуцер 5, где повторяется и усиливается по амплитуде. Усиленный сигнал одновременно и аналогично изменяется также н в камере сравнения порогового элемента 8, нройдя предварительно через проходную камеру н сопло реле 7. Подноры-задания в реле и элемент 8 подаются одинаковыми и так, что сопло проходной камеры реле 7 открыто, а противоположное сопло, подключенное к питанию порогового элемента, открывается при падении давления в камере срав 1ения. Таким образом, рост давления на выходе порогового элемента 8 проходит при падении давления в камере сравнения. При этом сопротивление входной цепи каналов незначительно но сравнению с дросселирующими эффектами нарастания давления на выходе порогового элемента 8.
Опорное давление задания настраивается так, что оно равняется давлению статического равновесия на выходе усилителя 4 для заданного значения контролируемого веса. При его совпадении в момент времени спада давления на нервом фронте выходного импульса происходит открытие сопла питания порогового элемента 8. В дальнейшем рост давления в выход 1ой камере элемеита 8 за первую четверть периода переходного процесса суммируется с шнравлением действия давления задания и давление быстро возрастает па выходе элемента 8, что приводит к быстрому срабатыванию реле 7. Через Н1тунер 12 выдается днскретный управляюнднй сигнал капала «Недовес. Одновременно реле 7 при срабатыванни перекрывает сопло проходной камеры, чем поекращается дальнейшее нзменение сигнала в камере сравнения элемента 8. В момент времени., соответствующий разрядке, в клапаны 9, 13 поступает управляющий импульс от реле 43. Тогда сбрасывается давление на выходе элементов 7, 8 и онн подготавливаются к работе в следующем цикле.
Работа канала «Перевес аналогична описанному. Вход осзществляется через штуцер 14, а выход сигнала отбраковкн от щтуцера 15.
Предмет изобретения
Контрольно-весовой автомат для отбраковки штучных грузов различной конфнгурании, содержаии-ш механизм нодачи, состоящий из двух последовательно установленных транснортеров, -последннй из которых скользит по
весовой платформе контрольно-весовую систему, сиихронизации и унравлення контрольновесовой системой, электропривод транснортеров регулнруемой скорости, механизм отбраковки и разделения грузов иа три потока и
блок питания схемы, отличающийся тем, что, с целью повышения точности отбраковки и упрощения схемы управления, он снабжен блоком преобразования силы веса в перемещение, соеди 1ениым с блоками иреобразования перемещения в пневматические аналоговые сигиалы, к которым, подключены блоки преобразования аналогового сигнала в дискретный сигнал отбраковкн и старт-стопной системы синхронизации и унравленпя. ш ш - аНИ т X J L. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Контрольно-весовое устройство для отбраковки штучных грузов | 1979 |
|
SU859826A1 |
| Устройство для дозирования в консервные банки жидких продуктов | 1976 |
|
SU598796A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ОТБРАКОВКИ ПРЕДМЕТОВ ПО ВЕСУ | 1967 |
|
SU214839A1 |
| Пневматическое контрольно-ве-COBOE уСТРОйСТВО | 1979 |
|
SU802807A1 |
| Устройство для сортировки штучных изделий | 1989 |
|
SU1673222A1 |
| Устройство для отбраковки штучных материалов,вес которых лежит за пределами допускаемых отклонений | 1948 |
|
SU90339A1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ КА ПОТОКИ ОТБРАКОВАННЫХ КОНСЕРВНЫХ БАНОК | 1973 |
|
SU379473A1 |
| ПНЕВМАТИЧЕСКОЕ КОНТРОЛЬНО-ВЕСОВОЕ УСТРОЙСТВО | 1972 |
|
SU426153A1 |
| Уровнемер сыпучих тел | 1973 |
|
SU479002A1 |
| Прибор для определения качества хлопка по длине его волокна | 1929 |
|
SU24671A1 |