1
Изобретение относится к лесной промышленности и может быть использовано для погрузки и транспортировки длинномерных грузов, например, пачки деревьев..
Известно транспортное средство для перевозки длинномерных грузов, содержащее поворотную раму с установленным на ней захватом О
Недостатком этого устройства является ограниченная возможность маневрирования транспортного-средства при захвате груза.
Иаиболе-е блтизким к изобрете1шю является транспортное,средство для перевозки длинномерных грузов, содержащее поворотную в продольной вертикальной плоскости грузоподъемную раму и шарнирно связанный с ней с возможностью поворота в поперечной вертикальной плоскости захват 2 .
Недостатками этого транспортного средства являются ограничение его маневренности и снижение продольной и поперечной устойчивости при пог-руз ке и транспортировании лесоматериалов из-за невозможности изменения рабочей длины грузоподъемной рамы и положения захвата на ней.
Цель изобретения - упрощение эксплуатационных характеристик.
Поставленная цель достигается тем что транспортное средство снабжено установленнрй на свободном конце грузоподъемной рамы с возможностью вращения вокруг своей оси поперечной балкой, на которой закреплен упомя1гутый захват, включающий в себя основание и подвижные вдоль него две пары зажимных рычагов, при этом грузоподъемная рама выполнена телескопической, а на поперечной балке смонтированы фиксаторы требуемого положения основания относительно последней.
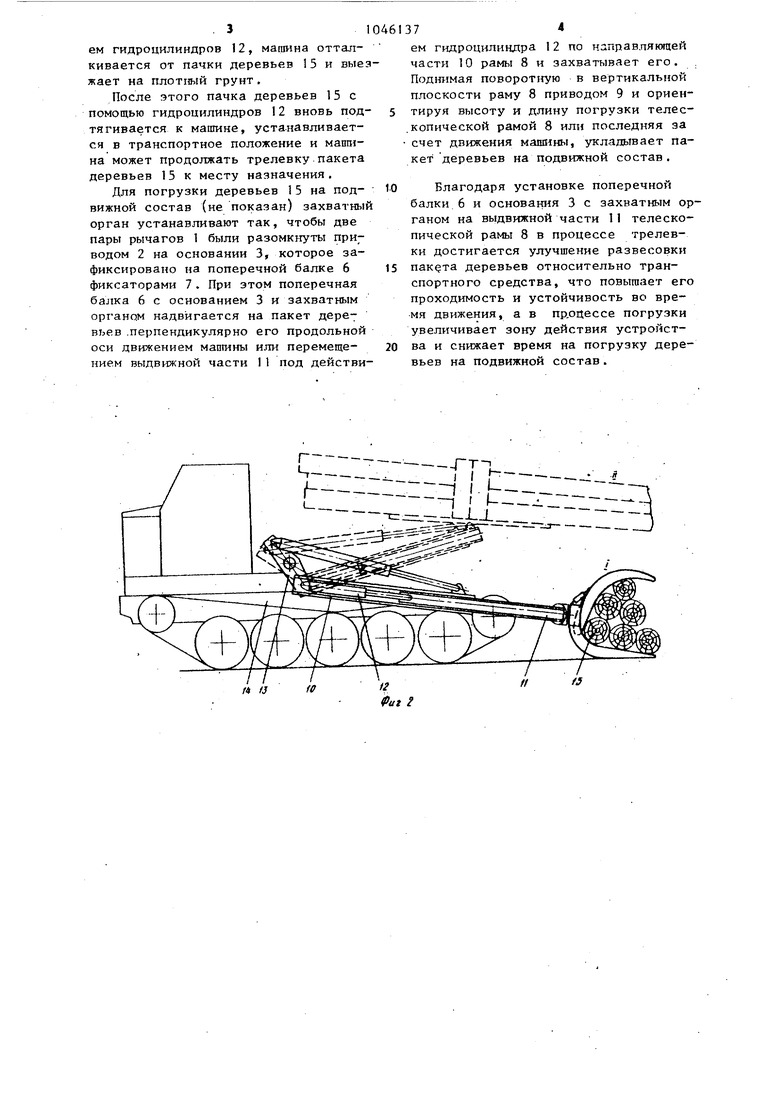
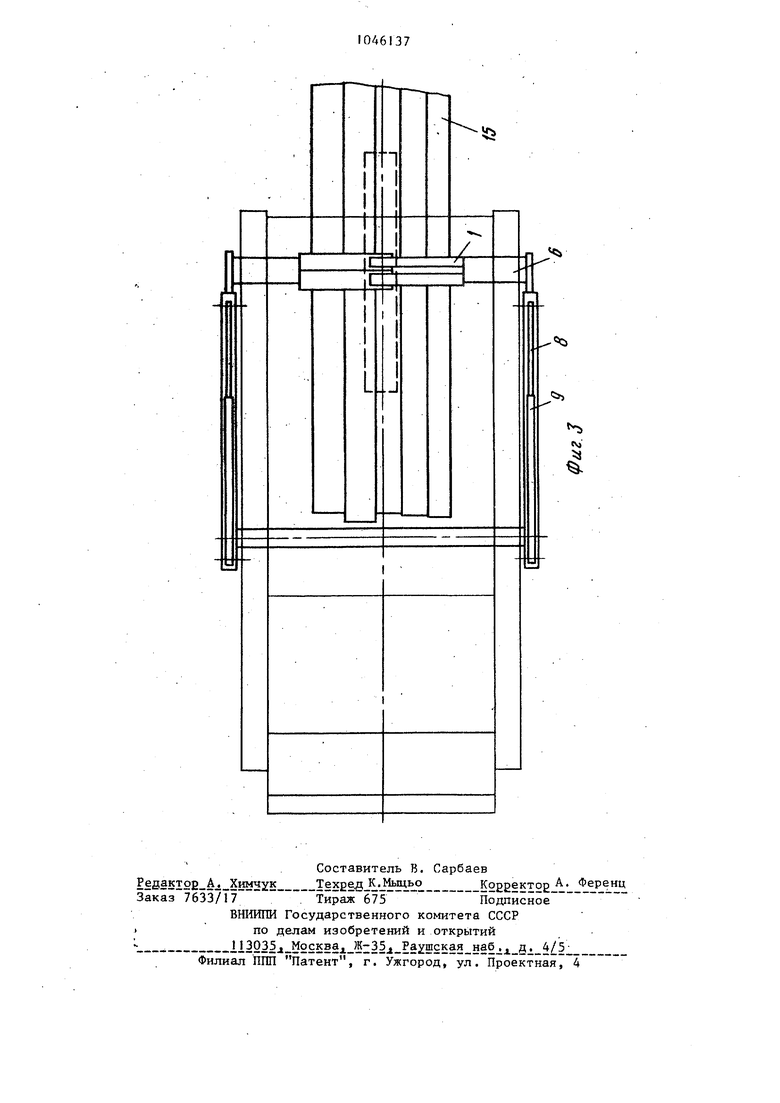
На фиг. 1 схематически изображено транспортное средство для перевозки длинномерных грузов, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, при трелевке пачки хлыстов, вид сверху.
Транспортное средство для перевозки длинномерных грузов включает две пары подвижно зажимных рычагов с приводом 2, основание 3 с шарниром 4 и приводом 5, поперечную балку 6с фиксаторами 7, грузоподъемную телескопическую поворотную раму 8 с при37 J водом 9. Телескопическаяповоротная в вертикальной плоскости рама 8 ммее направляющую часть 10, в которой перемещается выдвижная часть 11 под действием гидроцилиндра 12. Направляющая часть 10 рам) .8 шарнирно соедит ена-с рычагом 13, установленным на раме 14 транспортного средства.. Основание 3 с подвижными двумя парами зажим1П)1Х рычагов 1 имеет привод 5 для его поворота вокруг шарнира Д и фиксации на поперечной балке 6 при погрузке пачки деревьев.
Устройство работает следующим образом .
Для бесчокерной трелевки пачки деревьев 15 захватный орган .ливается так, чтобы две пары рыча-, гон 1 были сомкнуты приводом 2 на основании 3, которое зафиксировано на поперечной балке 6 фиксаторами 7 При этом поперечная балка 6 с основанием 3 и захватш.ш, органом надвигаются на пачку деревьев пер,пендикулярно его продольной- оси движением машины или перемещением выдвижной части 1,1 под действием гидроцилиндра 12 по направляющей части 10 ракгы 8 и захватывает его. Поднимая поворотную в вертикальной плоскости раму 8 приводом 9 и одновременно гздвигая выдвижную часть 1 в направляющую часть lOjустанавливают раму 8 в положение, оптимальное дпя трелевки деревьев (фиг. 2, Ми фиг З). Машина начинает движение. Удерживае1-{ый захватным органом пакет деревьев в результате срабатывания фиксаторов 7 позволяет основанию 3 ,поворачиваться вокруг шарнира 4 относительно поперечной балки 6. В результате ,этого машина повернуться относительно продольной оси пакета деревьев и продолжить движение к разгрузочной площадке. На месте разгрузки захватный орган, состоящий из двух пар рычагов 1 , раскрывают и пакет деревьев под действием сил тяжести освобождается . После разгрузки транспортное средство возвращается за новым пакетом деревьев и цикл бесчокерной трелевки повторяется.
При движении машины с пачкой деревьев по труднопроходимой местности машина, в случае застревания, может производить самовыталкива1ше, Делается это следующим образом. Перемещением выдвижной части 1, усили
ем гидроцилиндров 12, отталкивается от пачки деревьев 15 и выежает на плотный грунт .
После этого пачка деревьев 15 с помощью гидроцилиндров 12 вновь под тягивается к машине, уста-навливается в транспортное положение и машлна может продолжать трелевку.пакета деревьев 15 к месту назначения,
Для погрузки деревьев 15 на подвижной состав (не показан) захватный орган устанавливают так, чтобы две пары рычагов 1 были разомкнуты приводом 2 на основании 3, которое зафиксировано на поперечной балке 6 фиксаторами 7. При этом поперечная балка 6 с основанием 3 и захватным органом надвигается на пакет деревьев .перпендикулярно его продольной оси движением машины или перемещением выдвижной части 11 под действи1374
ем гидроцилиндра 12 по направляющей части 10 рамы 8 и захватывает его. Поднимая поворотную в вертикальной плоскости раму 8 приводом 9 и ориентируя высоту и длину погрузки телес.конической рамой 8 или последняя за счет движения машины, укладывает пакет деревьев на подвижной состав.
Благодаря установке поперечной балки 6 и основания 3 с захватным органом на выдвижной части 11 телескопической рамы 8 в процессе трелевки достигается улучшение развесовки пакета деревьев относительно транспортного средства, что повышает его проходимость и устойчивость во время движения, а в пр.оцессе погрузки увеличивает зону действия устройства и снижает время на погрузку деревьев на подвижной состав ,
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕЛЕВОЧНО-ПОГРУЗОЧНАЯ МАШИНА | 2010 |
|
RU2440288C1 |
| Транспортное средство для перевозки длинномерных грузов | 1980 |
|
SU944960A1 |
| Транспортное средство для формирования и перевозки пачки длинномерных грузов | 1981 |
|
SU988608A1 |
| Транспортное средство для бесчокерной трелевки деревьев | 1981 |
|
SU981041A1 |
| Транспортное средство | 1988 |
|
SU1594018A1 |
| ВАЛОЧНО-ТРЕЛЕВОЧНАЯ МАШИНА | 1995 |
|
RU2105466C1 |
| МАШИНА ДЛЯ ПОВАЛА И БЕСЧОКЕРНОЙ ТРЕЛЕВКИДЕРЕВЬЕВ | 1964 |
|
SU166857A1 |
| Прицеп для перевозки деревьев | 1981 |
|
SU1044544A1 |
| Транспортное средство для бесчокерной трелевки деревьев | 1981 |
|
SU1044496A1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ДЛИННОМЕРНЫХ ГРУЗОВ, содержащее поворотную в продольной вертикальной Плоскости грузоподъемную раму и шарнирно связанный с ней с возможностью поворота в поперечной вертикальной плоскости захват, о а ющ е е с я тем, что, с целью улучшения эксплуатационных характеристик, оно. снабжено установленной на свободном конце грузоподъемной рамы с возможностью вращения вокруг своей оси поперечной балкой, на которой закреплен упомянутый захват, включающий в себя основание и подвижные вдоль него две пары зажимных рычагов, при этом грузоподъемная рама вьтолнена телескопической, с а на поперечной балке смонтированы фиксаторы требуемого положения осно(Л вания относительно последней. 4; О5 со 
/
tvj
