1
.(61) 838886. 1(21) 4295327/24-07 (22) 10.08.87 (46) 15.12.89. Бюл, № 46
(71)Всесоюзный научно-исследовательский институт электроэнергетики
(72)Р.С. Цгоев
(53)621.316.728(088.8)
(56) Авторское свидетельство СССР № 838886, кл. Н 02 J 3/06, 1981,
(54)УСТРОЙСТВО ДЛЯ СВЯЗИ ДВУХ ЭНЕРГОСИСТЕМ
(57) Изобретение относится к электротехнике „ Целью изобретения является повышение надежности работы устройства. В суммирующем элементе 14 осуществляется формирование задания скорости вращения вала, равной полусумме частот объединяемых энергосистем, и совместно с элементами 15 и 1 о производится пропорционапьно- интегрально-дифференциальное регулирование скорости- вращения вала устройства. Если разность между часто Hepwcucmei al Z
(57) Изобретение относится к электротехнике „ Целью изобретения является повышение надежности работы устройства. В суммирующем элементе 14 осуществляется формирование задания скорости вращения вала, равной полусумме частот объединяемых энергосистем, и совместно с элементами 15 и 1 о производится пропорционапьно- интегрально-дифференциальное регулирование скорости- вращения вала уст
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи двух энергосистем | 1979 |
|
SU838886A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1115164A1 |
| Устройство для связи двух энергосистем (его варианты) | 1984 |
|
SU1431005A1 |
| Устройство для объединения энергосистем | 1987 |
|
SU1504727A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1575262A2 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1976 |
|
SU650157A1 |
Изобретение относится к электротехнике. Целью изобретения является повышение надежности работы устройства. В суммирующем элементе 14 осуществляется формирование задания скорости вращения вала, равной полусумме частот объединяемых энергосистем, и совместно с элементами 15 и 16 осуществляется пропорционально-интегрально-дифференциальное регулирование скорости вращения вала устройства. Если разность между частотами энергосистем становится меньше заданного значения (например, равна нулю), то по сигналу на выходе блока 17 сравнения частот, поступающему на вход задатчика 18 скорости вращения вала, последний формирует на своем выходе постоянный сигнал, пропорциональный добавочному значению к сигналу задания скорости вращения вала суммирующего элемента 14. Если взаимное скольжение между частотами объединяемых энергосистем равно или близко к нулю, то обе асинхронизированные синхронные машины 3, 4 переводятся в режим скольжения одного знака. Необходимо, чтобы скольжение было минимальным, так как с ростом скольжения машин общий К.П.Д. устройства снижается. 1 ил.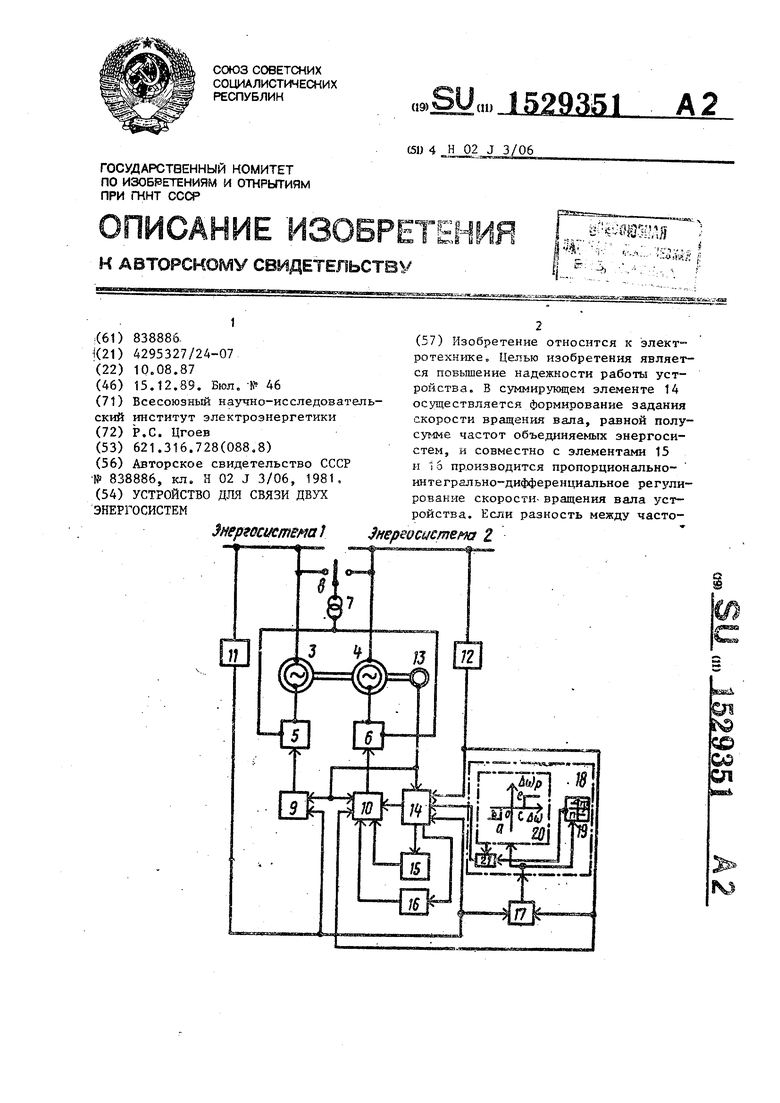
ess
Од
сд
i tiMH энергосистем становится меньше заданного значения (например, равна TOO)5 то по сигналу на выходе бло- к4 17 сравнения частот, поступающекг на вход задатчика 18 скорости вра щиния вала, последний формирует на выходе постоянный сигнал, про- п|5рциоиальньй добавочному значению к сигналу задания скорости вращения вала суммирующего элемента 14. Если
35
- .15
Изобретение относится к электротехнике, а именно к электромеханивским преобразователям частоты для объединения энергосистем.
Целью изобретения является повы- 20 ение надежности работы устройства. , На чертеже представлена схема 1, федлагаемого устройства.
Устройство для связи двух энергосистем 1 и 2 состоит из двух асин- 25 1:ронизированных синхронных машин
АСМ) 3 и 4 с жестко соединенными
налами, обмотки роторов которых че63 управляемые преобразователи 5
6 частоты соединены соответственно JQ 1(юсредством трансформатора 7 и пере- |шючателя 8 со статорной цепью маши- ы 3 или 4, т.е. с энергосистемой l или 2. Входы управляемых преобра- рователей 5 и 6 частоты соединены |с выходами регуляторов 9 и 10 воз- буждения соответственно, входы KOTOPIJDC переключены соответственно к датчикам 11 и 12 частот энергосистем и датчику 13 скорости вращения вала.
Вхбды с ммирующего элемента 14 соединены с датчиками 11 и 12 частот . . энергосистем и датчиком 13 скорости вала, а выходы - с входом регулятора 10 возбуждения и входами дифферандщ)ующего 15 и интегрирующего 16 элементов, при этом выходы последних двух-элементов соединены с входами регулятора 10 возбуждения. Входы блока 17 сравнения частот энергосистем п соединены с датчиками 11 и 12 частот, а выход подключен к входу задатчика 18 скорости вращения вала, выход которого соединен с входом суммирующего элемента 14. Блок 17 сравнения частот выполнен как сумматор. Задатчик 18 скорости вращения вала содержит компаратор 19, нелинейный элемент 20 и сумматор 21. Входы элементов 19 и 20 и выход
15293514
взаимное скольжение между частотами объединяемых энергосистем равно или близко к нулю, то обе асинхронизиро- J. ванные синхронные машины 3, 4 переводятся в режим скольжения одного знака. Необходимо, чтобы скольжение было минимальным, так как с ростом скольжения машин общий КПД устрой10
ства снижается. 1 ил.
5
5
0
5
Q Q
п
элемента 21 образуют соответственно вход и выход задатчика 18. Выход задатчика 18 соединен с входом суммирующего элемента 14. Нелинейный элемент 20 выполнен с зоной нечувствительности (на чертеже участок hoc), равной уче. тверенному минимальному длительно-допустимому скольжению асинхронизирован- ной синхронной машины агрегата. Характеристики компаратора 19 и нелинейного элемента настроены так, что амплитуды
.выходного сигнала равны полусумме минимального дпительно-допустимого скольжения S|,,,,on и максимального длительно-допустимого скольжения машины, но противоположны по знаку. SMMH. доп S такс-доп определяются толы- ко конструкцией машины и ддя нее являются постоянными величинами. При этом S ддиц доо ограничивается тепловым
режимом ротора, а 8(1до,кс. доп наибольпшм (потолочным) значением напряжения возбуждения, а в конечном итоге зависят от изоляции обмотки возбузкдения.
Устройство работает следующим образом,
В суммирующем элементе 14 осуществляется формирование задания скорости вращения со1 вала, равной полусумме частот СО, и cOg объединяемых энергосистем, и совместно с элементами 15 и 16 производится пропорционально-интегрально-дифференциальное регулирование скорости вращения вала устройства. Если разность между частотами энергосистем становится меньше заданного значения (например, равна нулю), по сигналу на выходе блока 17 сравнения, частот, поступающему на вход задатчика 18 скорости вращения вала, послед- ,ний формирует на своем выходе постоянный сигнал, пропорциональный добавечному значению йСЭрк сигналу зада- ния скорости вращения вала суммирующего элемента 14. Полный сигнал равен co l, + fv03p .
Если взаимное скольжение между частотами объединяемых энергосистем равно нулю или близко к нулю, то обе АСМ агрегата асинхронизированно- го электромеханического преобразователя частоты (АС ЭМПЧ) переводятся в режим скольжения одного знака. Зна чение этого скольжения может быть любым, вплоть до наибольшего, когда U f(foM Желательно, чтобы скольжение было минимальным, так как с ростом скольжения машин общий КПД устройства АС ЭМПЧ.падает.
Рассмотрим, как формируется сигнал, уставки по скорости вращения вала, например, при Q, СО , При (СО, -ОЗг.) - 25д,„ц,доп, что определяется характеристикой нелинейного элемента, сформируем для первой энергосистемы новое значение частоты в виде
СО, С0,+ОЭ| (S,q,c. до„ + Змцн. доп законе управления задаТак как в
1-гп«-г
ннеСд) по-прежнему формируется как.
полусумма частот энергосистем, получим
СУ),+032 СО, + С0г
f 2 2
(SMOKC, SMUH. )
где добавка Q,(S
&СО
.
+
Р
Частоты напряжений возбуждения машин в установившемся режиме (т.е. приоар СО) соответственно равны;
Wa-ca.
СО
ij CO,-Wp - 05, (S
макс, дой
ч ) .доп
, ii W,((t.Aon + S/w«H,Aon ) -
Из характеристик компаратора 19 и нелинейного элемента 20 (см.чертеж) видно, что при усльвии СО, - 03
U СО - 2S „„„ до„ (т.е. влево от.
точки b на оси абсцисс) на выходе нелинейного элемента отрицательный сигнал &CJL)JJ (отрезок Ьа), а на выходе компаратора 19 (влево от точки о на оси абсцисс) - Положительный сигнал ЬОЭр (отрезок от). Так как эти равные по амплитуде, но противоположные по знаку сигналы поступают на входа сумматора 21, то их суммарный сигнал равен нулю. При уменьшении взаимного скольжения частот энергосистемы при ус- лоБИиО -2S „ин, дд„ (т.е. в точке Ь) сигнал нелинейного элемента 20 равен нулю, и на вход сумматора 21 поступает сигнал только.от компаратора 19. В момент перехода (т.е. в точке W имеем частоты напряжений возбуждения машин одного знака;
i
Wj
З миадоп макс. АОП
, АОП
2
С
макс, д,оп
2
0
0
5
0
Такое формирование дополнительного сигнала по скорости вращения обеспечивает работы обеих машин со скольжениями в рабочем диапазоне, конкретно в середине рабочего диапазона одной из машин агрегата (в рассмотренном примере для второй машины с Wj ), что повьш1ает надежность работы устройства. При скольжении одного 5 знака по статору, машины работают в разных режимах (например, АСМ 4 - двигатель, АСМ 3 - генератор), поэтому потоки активных мощностей Р и Рг имеют разные знаки, и обмотки возбуждения машин через преобразователи 5 и 6 частоты обмениваются активной мощностью, а через трансформатор 7 и переключатель 8 от источника возбуждения системы возбуждения машин поступают активная мощность лишь для покрытия потерь в элементах системы возбуждения и реактивная мощность, требуемая по режиму.
Предлагаемое устройство может быть применено для объединения энергосистем как с одинаковыми, так и с разными номинальными частотами, имеющими взаимные колебания частот. В рассмотренном примере лишь одна из асинхронизйрованных синхронных машин имеет в регуляторе возбуждения регулятор скорости указанного типа, однако такими регуляторами скорости могут
5
б|ыть снабжены обе асинхронизкрованнр)е синхронные майины устройства.
ормула изобретения
i Устройство для связи двух энерго- с|истем по авт. св. № 838886, отличающееся тем, 4TOj с целью повышения надежности работы устройства путем обеспечения работы обеих fiiafflHH со скольжениями одного знака середине рабочего диапазона одной и1з машин агрегата, блок сравнения частот энеогос.истем выполнен кяк 1С/мматор, задатчик скорости вращения в ала содержит компаратор, нелинейный .элемент и сумматор, выход сумматора
образует выход эадатчика СКОРОСТИ вращения вала, входы сумматора соед° - нены с выходами компаратора и нелинейного элемента а входы последних образуют вход задатчика скорости вращения валау при этом компаратор и нелинейный элемент выполнены с амплитудами сигналов на выходе, равными
полусумме минимального длительно-допустимого скольжения и максимального длительно-допустимого скольжения указанной машины, но противоположньа 1и по знаку, а нелинейньй элемент имеет
зону нечувствительности, равную учетверенному минимальному длительно-допустимому скольжению асинхронизирован- ной синхронной машины.
