(54) УСТРОЙСТВО ДЛЯ СВЯЗИ ДВУХ ЭНЕРГСЗСИСТЕМ
ме того, устройство содержит датчики частот обеих энергосистем, выходы которых подкл очбны ко входам блока разностной частоты. Выходы преобразователей подключены к роторным обмоткам машин 2.
Цель настоящего изобретения - упроЧцение схе:мы управления.
Эта цель достигнута в устройстве для связи двух энергосистем, содерл аш,ем две. асиихронизированиые синхронные машины с жестко соединенными валами, статорные обмотки каждой из которых подключены к своей энергосистеме, управляемый преобразователь частоты,регулятор с блоком формирования функции регулирования и блоком разностной частоты, датчики частот обеих энергосистем, причем выход датчика частоты первой энергосистемы соединен со входом блока разностной частоты регулятора, а выход регулятора подключен ко входу преобразователя частоты. .
Новым в устройстве является то, что в качестве датчиков частоты использованы датчики половинной частоты, роторные об-, мотки машин соединены между собой с противоположным чередованием фаз и к общим точкам соединения этих обмоток подключены выходьг управляемого преобразователя, частоты, а выход датчика частоты второй энергосистемы соединен со входом блока формирования функции регулирова.ния регулятора.
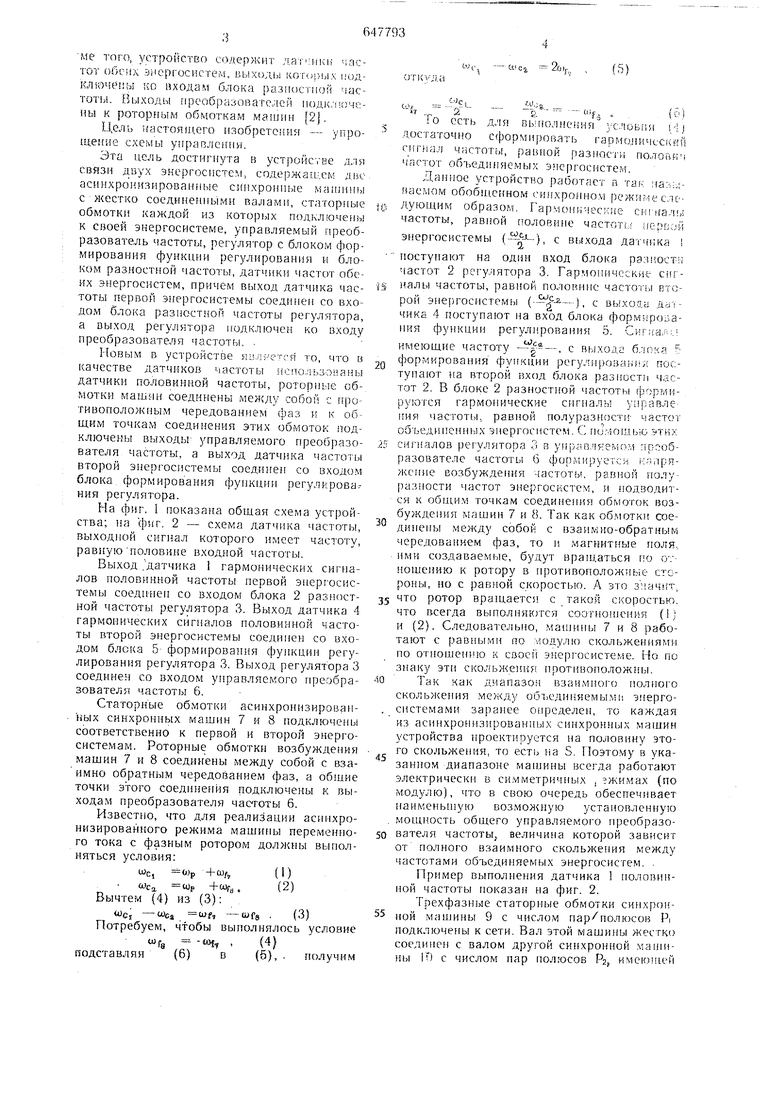
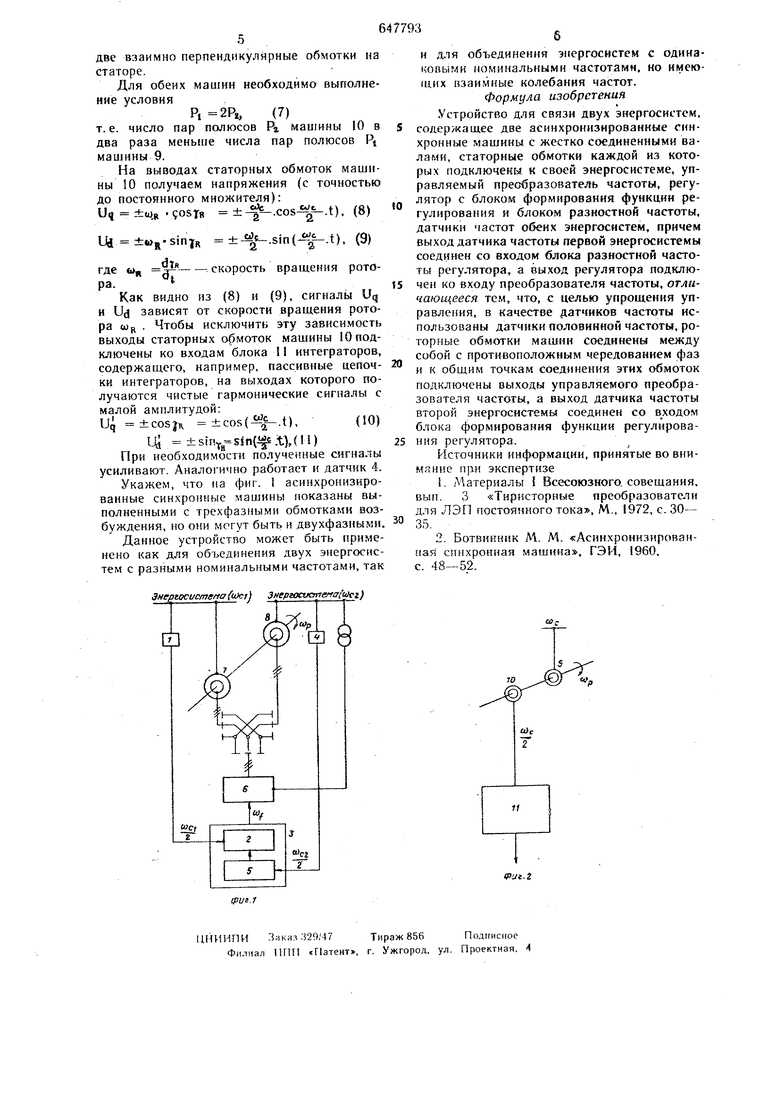
На фиг. i показана общая схема устройства; на фиг. 2 - схема датчика частоты, выходной сигнал которого имеет частоту, равнуюполовине входной частоты.
Выход .датчика 1 гармонических сигналов половинной частоты первой энергосистемы соединен со входом блока 2 разностной частоты регулятора 3. Выход датчика 4 гармонических сигналов половинной частоты второй энергосистемы соединен со входом блока 5-формирования функции регулирования регулятора 3. Выход регулятора 3 соединен со входом управляемого преобразователя частоты 6.
Статорные обмотки асинхронизирован ных синхронных машин 7 и 8 подключены соответственно к первой и второй энергосистемам. Роторные обмотки возбуждения машин 7 и 8 соединены между собой с взаимно обратным чередованием фаз, а общие точки этого соединения подключены к выходам преобразователя частоты 6.
Известно, что для реализации асинхронизированного режима машины переменного тока с фазным ротором должны выполняться условия:
WC( Wp +W/,(I)
Wca Wp .(2)
Вычтем (4) из (3):
Wci -и; wft -tufe (3) Потребуем, чтобы выполнялось условие
wfa . () подставляя (6) в (S), . получим
tucj -сое - 2(Uf,
(5)
откуда
% - . . . (6)
10 есть для выполнения условия (4)
достаточно сформировать гармолическйй
сигнал частоты, равной разности половин
частот объединяемых энергосистем.
Данное устройство работает в так называемом обобщенном синхронном режиме следующим образом. Гармонические сигналы частоты, равной половине частоты первой энергосистемы (-), с выхода датчика 1 поступают на один вход блока разности частот 2 регулятора 3. Гармонические сигналы частоты, равной половине частоты, второй энергосистемы (), с выхода датчика 4 поступают на вход блока формирования функции регулирования 5. Сигналы,
имеющие частоту , с выхода блока 5 j формирования функции регулирования поступают на второй вход блока разности частот 2. В блоке 2 разностной частоты формируются гармонические сигналы управления частоты, равной полуразности частот объединенных энергосистем. С помощью этих
5 сигналов регулятора 3 в управляемом преобразователе частоты б формируется напряжение возбуждения частоты, равной полуразности частот энергосистем, и .подводится к общим точкам соединения обмоток возбуждения машин 7 и 8. Так как обмотки сюединены между собой с взаимно-обратным чередованием фаз, то и магнитные поля, ими создаваемые, будут вращаться по отношению к ротору в противоположные стороны, но с равной скоростью. А это значит,
35 что ротор вращается с такой скоростью, что всегда выполняются соотношения (1) и (2). Следовательно, машины 7 и 8 работают с равными по модулю скольжениями по отношению к своей энергосистеме. Но по знаку эти скольжения противоположны.
0 Так как диапазон взаимного полного скольжения между объединяемыми энерго. системами заранее определен, то каждая из ас,инхронизированных синхронных машин устройства проектируется на половину этого скольжения, то есть на S. Поэтому в указанном диапазоне машины всегда работают электрически в симметричных , жимах (по модулю), что в свою очередь обеспечивает наименьшую возможную установленную мощность общего управляемого преобразователя частоты, величина .которой зависит от полного взаимного скольжения между частотами объединяемых энергосистем. .
Пример выполнения датчика 1 половинной частоты показан на фиг. 2.
Трехфазные статорные обмотки синхрон55 ной машины 9 с числом пар/полюсов Pf подключены к сети. Вал этой машины жестко соединен с валом другой синхронной машины IT) с числом пар полюсов Pj, имеющей
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энергосистем | 1982 |
|
SU1046839A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1115164A1 |
| Устройство для связи двух энергосистем | 1988 |
|
SU1598043A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Устройство для связи энергосистем | 1980 |
|
SU936209A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1121740A1 |
| Устройство для гибкой связи энергосистем | 1977 |
|
SU729746A1 |
| Устройство для связи двух энергосистем (его варианты) | 1984 |
|
SU1431005A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU752610A1 |
