Изобретение относится к станкотроению и может быть использовано при обработке винтов, червяков,. шнеков, направляющих и других изделий с наружными или внутренними винтовы- . и поверхностями переменного шага.
Известен станок для обработки наружных- винтовых поверхностей с переменным шагом, шпиндель и суппорт которого кинематически соединены ежду собой винторезной цепью с механизмом изменения шага, выход которого связан с суппортом l .
Известен станок для обработки внутренних винтовых поверхностей переменного шаг, винторезная цепь которо-го соединяет суппорт и инструментальный шпиндель и содержит механизм изменения шага в виде копировального устройства, выход которого кинематически связан с инструментальным шпинделем 2 .
Наиболее близким к предлагаемому является станок для обработки винтовых поверхностей с переменным шагом., включающий привод и два рабочих органа, кинематически связанных между собой винторезной цепью, содержащей cyммиpsm)щий меха-, низм,механизм изменения шага, вход и- выход которого через суммирующий механизм связаны с одним из рабочих органов, причем привод подключен к входам механизма изменения шага и суммирующего механизма винторезной цепи З .
Недостатком известных станков является то, что диапазон изменения шага обрабатываемой поверхности ограниче.н возможностями используемого механизма изменения шага.
Целью изобретения является расширение диапазона изменения шага. Поставленная цель достигается тем, что в станке для обработки винтовых поверхностей с переменным шагом, включающем привод и два рабочих органа, кинематически связанных между собой винторезной цепью, содержащей суммирующий механизм, механизм изменения шага, вход и которого через суммирующий механизм связаны с одним из рабочих органов, причем привод подключен к входсШ механизма изменения шага и су №1ирующего механизма винторезной j цепя, выход механизма изменения шага: кинематически связан и с другим ра- i бочим органом.
На фиг.1 представлена схема станка для обработки наружных поверхност ей переменного шага; на фиг.2 то же, для обработки внутренних винтовых поверхностей переменного шага.
Станок (фиг.1) содержит рабочий орган (шпиндель) 1, несущий изделие 2, кинематически связанный с регулируем1л«1 приводом 3 и с другим рабочим органом - суппортом 4, не.сущим резец (или фрезерную головку), винторез.ной цепью, содержащей суммирующий механизм 5, механизм 6 изменения шага, коробку (гитару) подач 7 и винтовую передачу 8.
Вход суммирующего механизма 5 через гитару 9 соединен с выходом механизма б изменения шага винторезной цепи. Для радиального пере0мещения суппорта служит винтовая передача 10..
Кроме того, входы суммирующего механизма 5 и механизма. 6 изменения щага связаны участком винторезной
5 цепи, к которому подсоединен привод, а выход механизма 6 изменения шага связан с суппортом 4,
Механизм 6 изменения шага выполнен в виде бесступенчатого привода (например, вариатора, спирально0цилиндричес1(ой передачи, поворотной линейки и т.п.), управление которым осуществляется либо от шпинделя, либо от ходового винта, либо от отдельного устройства.
5
Станок работает следующим образом;
Шпиндель 1 получает вращение от приво 1а 3 через суммирующий механизм 5. От привода 3 через меха0низм 6 изменения шага, коробку (ги|тару) подач 7 и винтовую передачу 8 получает поступательное движение суппорт 4 с инструментом.
В процессе обработки передаточ5ное отношение механизма б непрерывно изменяется, благодаря чему суп- . порт 4 движется с переменной скоростью.,
От ведомого звена механизм б из0менения шага через гитару 9 получает вращательное движение второй ведущий элемент суммирующего механизма 5, поэтому шпиндель 1 вращается с переменной угловой скоростью так, что при увеличении скорости движения суп5порта 4 угловая скорость шпинделя 1 уменьшается и, наоборот, при уменьшении скорости суппорта скорость шпинделя возрастает. Соотношение между скоростями основного (от при0вода 3) и дополнительного (от механизма 6) вращательных движений шпинделя 1 настраивается гитарой 9.
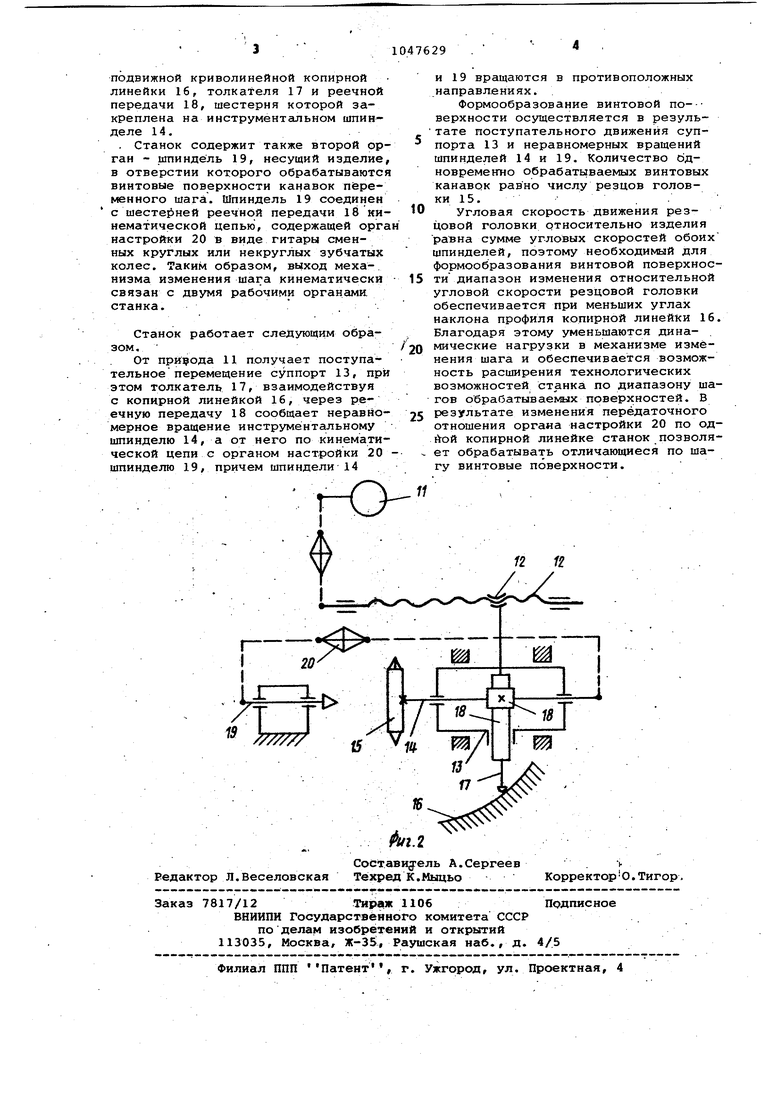
В станке для обработки внутренних винтовых поверхностей переменно5го шага(фиг.2) регулируемый привод 11 кинематически связан через винтовую передачу 12с рабочим органом, состоящим из суппорта 13, несущего инструментгшьный шпиндель 14 с рез0цовой головкой 15...
Суппорт 13 и инструментальный шпиндель 14 кинематически связаны между собой винторезной цепью, содержащей механизм изменения шага,, выполненный, например, в виде не5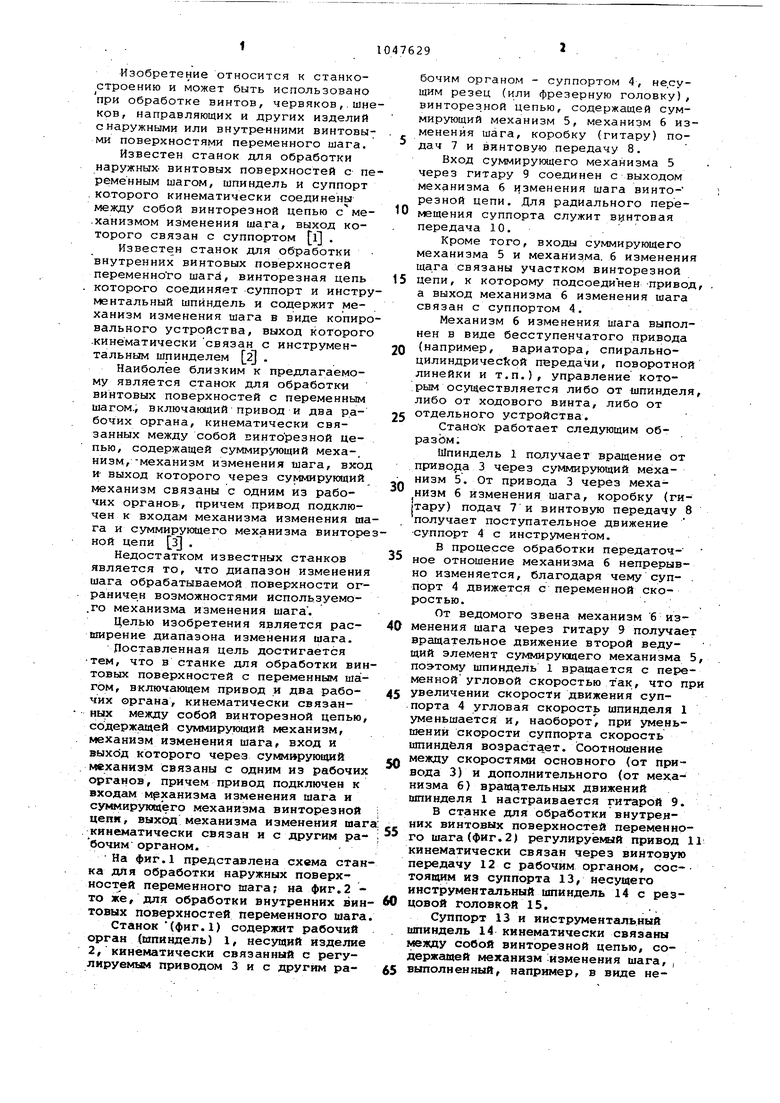
СТАНОК ДЛЯ ОБРАБОТКИ ВИНТОВЫХ ПОВЕРХНОСТЕЙ С ПЕРЕМЕННЫМ ШАГОМ, включающий привод и два рабочих органа, кинематически связанных между собой винторезной цепью, содержащей суммирующий механизм, механизм изменения шага, вход и выход которого через суммирующий механизм связаны с одним из рабочих органов, причем привод подключен к входам механизма изменения шага и суммирую.щего механизма винторезной цепи, отличаю щи йс я тем, что, с целью расширения диапазона изме- . нения шага, выход механизма изменения шага кинематически связан и с другим рабочим органом. Ш W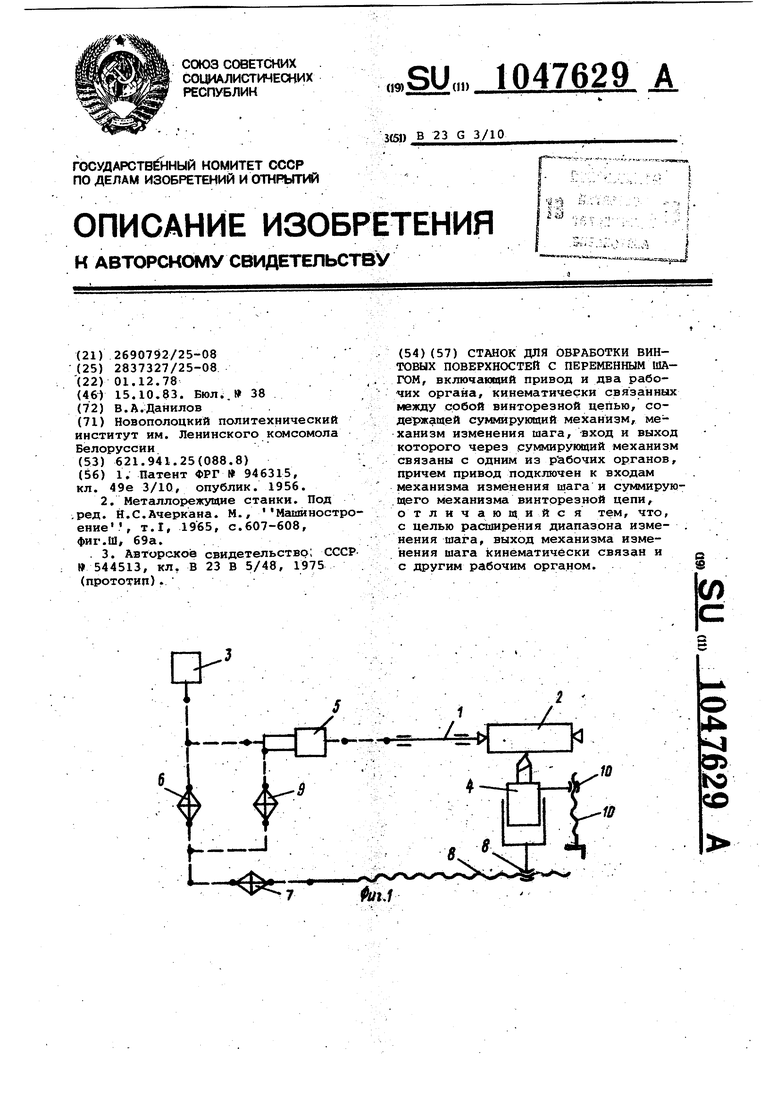
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент ФРГ 946315, кл | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
| Приспособление для строгания деревянных полов, устраняющее работу на коленях | 1925 |
|
SU1956A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Металлорежущие станки | |||
| Под .ред | |||
| Н.С.Ачеркана | |||
| М., Машиностроение, T.I, 1965, с.607-608, фиг.Ш, 69а | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство к токарно-винторезному станку для обработки винтовых поверхностей с переменным шагом | 1975 |
|
SU544513A1 |
