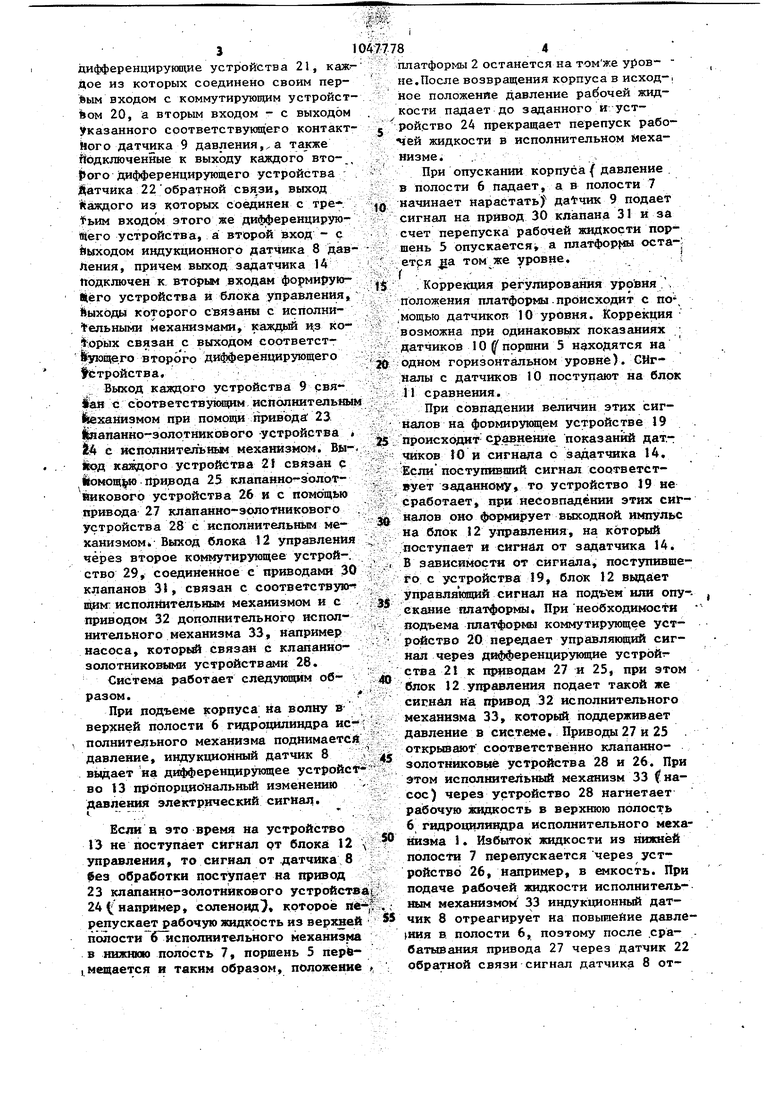
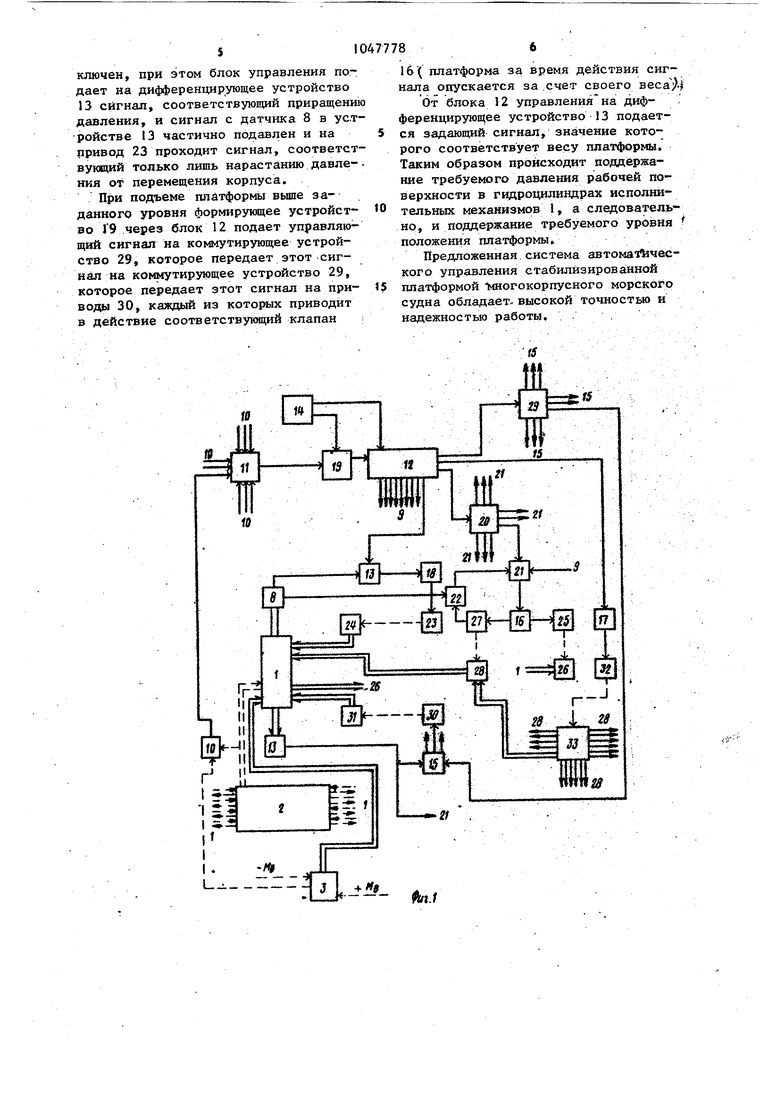
Изобретение относится к судостроению, в частности к системам автоматического управления стабилизированной платформой многокорпусного морского судна. Известна система автоматического управления стабилизированной платформой многокорпусного морского судна, содержащая исполнительные механизмы перемещения платформы, число которых не менее числа корпусов сУдна, связанных соответственно с указанными исполнительйыми механизмами, индукционные и контактные датчики давления рабочей жидкости в полостях гидроцилиндров исполнительных механизмов перемещения платформы, выходы которых связаны с соответствуюйШмй I исполнительными мехамнзмами, датчики уровня положения платформы, установ ленные каждый на соответствующем Kpp пусе судна, подключенный к их выходам блок сравнения, связанный своим выходом с входом блока, управления, выходы которого соединены с первыми дифференцирующими устройствами, .через которые упомянутые индукционшле датчики давления связаны с исполнительными механизмами перемещения платформы, а также задатчик уровня положения платформы и усилители L J« Однако известная система ха ктеризуется недостаточной точностью и надежностью работы. Цель изобретения - повьшение точ- ности и надежности работы системы автоматического управления стабилизированной платформой многокорпусного морского судна. Цель достигается тем, что извест ная система снабжена формирующим уст ройством, черед которое блок сравнекия связан с блоком управления подключенным к последнему первым и вторым коммутирующим устройства1 т, вто рыми дифференцирующими устройствами, каждое из которых соединено своим первым входом с первым коммутирующим устройством,, вторым входом - с выходом указанного соответствующегр кон- тактного датчика Давления, а выходом с соответствующим исполнительным ме канизмом, а также подключенными к выходу каждого второго дифференцирующего устройства датчиками обратной связи, выход каждого из которых соединен с третьим входом этого же дифференцирующего устройства,а второй вход - с выходом указанного индук ционного датчика Давления, при этомвыход задатчика уровня положения платформы подключен к вторым входам формирующего устройства и блока уш равления, выходы которого .через первое и второе коммутирующие устройства связаны с соответствующими исполнительными механизмами. На фиг. I представлена функциональная схема системы автоматического управления стабилизированной платформой многокорпусного морского судна; на фиг. 2 - механизм стабилизации платформы многокорпусного судна с корпусами, подвижными относительно платформы в момент, когда все корпуса находятся на слонах волНц а поршни гидроцилиндров исполнительных механизмов - на .одном-горизонтальном уровне; на фиг. 3 - ис-полнительные механизмы в момент, отраженный на Фиг.2. Система содержит исполнительные Механизмы 1 перемещения платформы 2, число которых не менее числа корпусов 3 судна, связанйых соответственно с указанными исполнйтельньп ш механизмами, каждьй из которых прёд «тавляет собой гидроцилиндр, жестко закрепленный на платформе 2. В гидроциливдре с эозможностьЬ) перемещения находится жестко связанный с . соответствующим корпусом при помощи штока 4 поршень 5, гидроцилиндр имеёт верхнюю 6 и нижнюю 7 полости. Кроме того, система содержит индукционные 8 и контактные 9 датчики дав-, ления рабочей жидкости в полостях , гидроцилиндров исполнительных механизмов перемещения платформы, выхода которых связаны с соответствующими т . исполнительньми механизмами, датчики 1 О уровня положения платформы, установленные каждый на соответствующем корпусе судна, подключенный к их выходам блок 11 сравнения, связанный своим выходом с входом блока 12 управления, выходы Которого соединены с первыми дифференцирующими устройствами 13, через которые индукционные датчики 8 давления связаны с исполнительньми механизмами перемещения платформы, а также задатчик 14 уровня положения платформы, усилители 15-18, а также формирующее Устройство 19, через которое блок 1 связан с блоком 12, подключенное к блоку 12 управления первое коммутирующеее устройство 20, вторые
дифференцирунндие устройства 21, каждое из которых соединено своим перйым входом с коммутирующим устройством 20, а вторым входом - с выходом Указанного соответствующего контактного датчика 9 давления,, а также Подключенные к выходу каждого вто-., дифференцирующего устройства |(атчика 22 обратной связи, выход (Каждого из которых соединен с трё fbHM входом этого же дифференцирующего устройства, а второй вход - с выходом индукционного датчика 8 давАения, причем выход задатчика 14 подключен к. вторым входам формирующего устройства и блока управления, выходы которого связаны с исполнительными механизмами, каждый и;з ко|-орых связан с выходом соответст веющего в торого дифферёнцирующег о 1йтройства,
Выход каждого устройства 9 свя|-ан с соответствующим испбпнителышм ханизмом при помощи привода; 23 |яаианно-эолотникЬвого -устройства 1 с йсполнительиьм механизмом. Вы- йод каждого устройства 21 связан с itoMomi привода 25 кяапанно золоГйикового устройства 26 и с помдщью привода 27 клапанно-золотникового устройства 28 с нсполнительньм механизмом Выход блока 12 управления через второе коммутирующее устрой-, ство 29, соединенное с приводами 30 клапанов 31, связан с соответствую исполнитепьиым механизмом не . приводом 32 дополнительного исполнительного механизма 33, например насоса, котор1Й связан с клапанно3олотниковыми устройств ами 28.
Система1 работает следующим образом.
При подъеме корпуса на волну вверхней полости 6 гидроцилиндра исполнительного механизма поднимаетсй давление, индукционный датчик В вьщает на Д1 еренцирующее устройство 13 пропорционапьный изменению давления электрический сигнал.
1. ,
Если в это время на устройство 13 не йоступает сигнал от блока 12 управления, то сигнал отдатчика,8 0ез обработки поступает на привод
23клапанно-золотниксюого устройства
24 например, соленовд7 которое iteрепу екает рабочую жидкость из верхней полости 6 исполиительного механизма
в нижнюю полость 7 поршень 5 перб, мещается и таким образом, положение
платформы 2 останется на томже уров- не.После возвращения корпуса в исход-1 ное положение Давление рабочей жидкости падает до заданного и устройство 24 прекращает перепуск рабочей жидкости в исполнительном механизме.
При опускании корпуса ( давление . в полости 6 падает, а в полости 7 начинает Нарастать) датчик 9 подает сигнал на привод 30 клапана 31 и за счет перепуска рабочей жидкости поршень 5 опускаетсяj а платформы остается на том же уровне.
Г . / . : . , . ,
Коррекция регулирования уровня. . положения платформы.происходит с поIмощью датчиков 10 уровня. Коррекция возможна при одинаковых показаниях датчиков 10 поршни 5 находятся на одном горизонтальном уровне). еНгналы с датчиков 10 поступают на блок 11 сравнения.
При совпадении величин этих сигналов на формирукщем устройстве 19 происходи сравнение показаний датчиков 10 и снгнада с задатчика 14. Если поступивший сигнал соответствует заданному, то устройство J9 не сработает, при несовпадёнин этих сигналов оно формир ует выходной импульс на блок i2 управления, на который поступает и сигнал от задатчика 14. В зависимости от сигнала, постэт1ившего с устройства 19, блок 12 вьщает управлякшшй сигнал на или опу екание платфор1Ш« Принеобходимости подъема платформы коммутирующее устрс ство 20 передает управляющий сигнал через дифференцирующие устройгства 21 к приводам 27 и 25, при этом блок 12 угфавления подает такой же сигнал на привод 32 исполнительиого механизма 33, который, поддерживает давление в сист.1е. Приводы 27 к 25 открывают соответственно клапаннозолотниковые устройства 28 и 26. При Этом исполнительный механизм 33 (насос) через УСТ1ЮЙСТВО 28 нагнетает рабочую жидкость в верхнюю полость б гидрощшшздра Исполнительного механизма 1. Избыток жидкости из нижней полости 7 перепускается через устройство 26, например, в емкость. При подаче рабочей жидкости исполнительным механизмом 33 индукцнонный датчик 8 отреагирует на повышение давле(иия в полости 6, поэтому после ерабатывания привода 27 через датчик 22 обратной связи сигнал датчика 8 отключей, при этом блок управления по,дает на дифференцирующее устройство 13 сигнал, соответствующий приращению давления, и сигнал с датчика 8 в устройстве 13 частично подавлен и на привод 23 проходит сигнал, соответствукжций только лишь нарастанию давле- НИИ от перемещения корпуса.
При подъеме ппатформь выше заданного уровня формирующее устройст во Г9 через блок 12 подает управляющий сигнал на коммутирующее устройство 29, которое передает этот сигнал на коммутирующее устройство 29, которое передает этот сигнал на приводы 30, каждый из которых приводит в действие соответствующий клапан
16( платформа за время действия сигнала опускается за .счет своего веса;)От блока 12 управления на дифференцирующее устройство 13 подается задшощий сигнал, значение которого соответствует весу плагформы. Таким образом происходит поддержание требуемого давления рабочей поверхности в гидродилиндрах исполнительных механизмов 1, а следовательно, и поддержание требуемого уровня положения платформы.
Предложенная система автомаэТяческого управления стабилизированной платформой Многокорпусного морскОГо судна обладает, высокой точностью и надежностью работы.
Л|./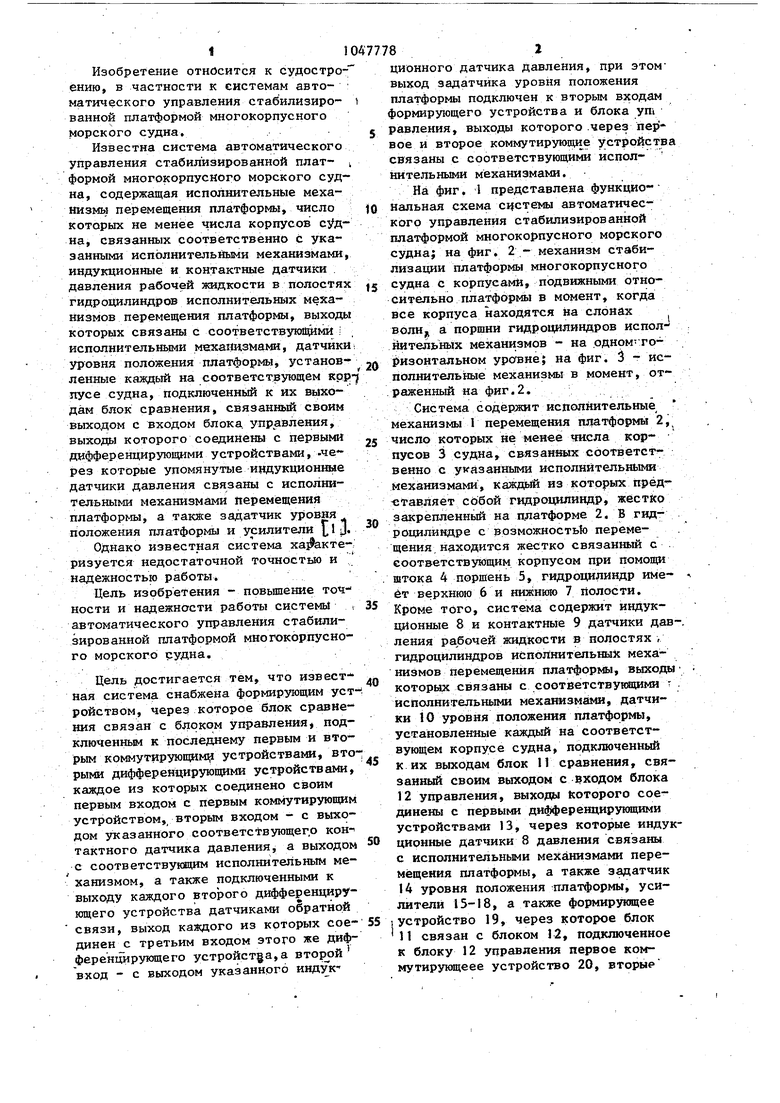
| название | год | авторы | номер документа |
|---|---|---|---|
| Морская стабилизированная платформа | 1980 |
|
SU984924A1 |
| Многокорпусное стабилизированное судно | 1981 |
|
SU1020305A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| Устройство для автоматического регулирования давления прессования асбестоцементных труб | 1985 |
|
SU1294625A1 |
| Устройство для управления процессом комбинированной обработки режущим и деформирующим инструментами | 1989 |
|
SU1821333A1 |
| Автоматическая система управления силовым приводом судового руля | 1983 |
|
SU1102715A2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2017 |
|
RU2658469C1 |
| Устройство управления рабочим органом землеройной машины | 1983 |
|
SU1122792A1 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
| Устройство для автоматического управления процессом выпаривания | 1985 |
|
SU1321437A1 |
СИСТЕНА АВТОМАТИЧЕСКОГО УПРАВШИИЯ еТДБИШЗИРОВАННОЙ ПЛАТФОРМОЙ МШГОКОРПУСНОГО МОРСКОГО СУДНА, содержащая испойнительш 1е механизмы перемещения платформы, число кото- . рых не менее числа корпусов судна,, гидравлически связанных соответственно с указанными исполнительными механизмами, индукционные и контактные датчики давления рабочей жидкости в полостях гидроцилиндров исполнительных механизмов перемещения платформы, вькоды которых связаны с Соответствуюпщми исполнительными механизмами, датчики уровня положения платформы, установленные каждьй на соответствующем корпусе судна, подключенный к их выходам блок сравнения, связанный своим выходом с входом блока управления, выходы . го соеда нены с первыми диффврен1дар о цими устройствами, через которые упомянутые индукционные датчики давления связаны с исполнительными механизмами перемещения платформы, а также задатчик уровня положения платформы и усилители, отлич ающа я с я тем, что, с целью повьшения точности и надёжности ее работы, она снабжена формирующим устройством, через которое блок сравнения связан с блоком, управления, подключенным к последнему дсоммутирующим устройством, вторыми дифференцирующими устройствами, каждое из которых соединено своим первым входом с коммутирукицим устройством, а BTopbiM входом - с выходом указанного соответствующего контактного датчика давления, а также подключенными к выходу второго дифферен(Л цирующего устройства датчиками обратной связи, выход каждого из которых соединен с третьим входом этого же дифференцирунлцего устройства, а ; второй вход - с выходом указанного индукционного датчика давления, при этом выход задатчика уровня положения платформы подключен к вторым вхо ,дам формирующего устройства и блока управления, выходы которого связаны с исполнительными механизмами, каждый из КОТ01РЫХ связан с выходом соответ00. ствующего второго дифференцирующего устройства.
| I | |||
| Авторское свидетельство CCGP по заявке & 2997359/27-1 а, | |||
| кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
