Изобретение относится к области автоматического управления движением судов при их динамическом позиционировании при решении задач поиска и обследования подводных объектов, характеризующихся частой сменой точек позиционирования.
Известны системы и комплексы (Авт. св. СССР №583032, №1308040; Пат. РФ №107124, №114451, №138640), в которых на основе информации с датчиков линейных перемещений судна относительно заданной точки дна и датчика курса судна вырабатывают командные сигналы на исполнительные средства судна (главные движители, подруливающие устройства, движительно-рулевые колонки и т.п.) для создания управляющих сил и момента, противодействующих гидродинамическим и аэродинамическим воздействиям на судно ветроволновых возмущений и морского течения.
Указанные системы и комплексы применяются в случаях, когда точка позиционирования не изменяется достаточно длительное время, например при буровых работах и спасательных операциях.
В то же время актуальны задачи поиска и обследования подводных объектов, характеризующиеся частой сменой точек позиционирования, например, с целью обследования обнаруженного объекта с разных ракурсов.
Недостатком указанных аналогов является отсутствие возможности многократного изменения точки позиционирования и выхода в нее в автоматическом режиме.
Известна система автоматического управления движением судна (Пат. РФ №2381140), принятая за прототип, содержащая блок формирования сигналов управления, блок коррекции параметров системы автоматического управления движением судна, задатчик курса и координат позиционирования, сумматор и приемоиндикатор спутниковой навигационной системы, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом задатчика курса и координат позиционирования, а выход - с входом блока формирования сигналов управления, входы блока коррекции параметров системы автоматического управления движением судна соединены с выходами задатчика курса и координат позиционирования и приемоиндикатора спутниковой навигационной системы, а выход - с входом блока формирования сигналов управления, при этом блок коррекции параметров системы автоматического управления движением судна выполнен с возможностью устранения рассогласований по курсу и по координатам посредством задания колец дальности от точки позиционирования с определением постоянной времени системы автоматического управления движением судна в зависимости от положения центра масс судна относительно этих колец дальности.
Недостатки аналогов присущи и прототипу.
Технический результат заключается в обеспечении возможности автоматического выхода в заданную позицию с ее удержанием при частой смене точек позиционирования.
Технический результат достигается за счет того, что в систему автоматического управления движением (САУД) судна, содержащую навигационную систему, задатчик курса и координат позиционирования, сумматор, блок формирования сигналов управления, блок коррекции параметров управления, в которой первые выходы навигационной системы и задатчика курса и координат позиционирования соединены с первым и вторым входом сумматора, выход которого соединен с первым входом блока формирования сигналов управления, входы блока коррекции параметров управления соединены со вторыми выходами навигационной системы и задатчика курса и координат позиционирования, а выход соединен со вторым входом блока формирования сигналов управления, выход которого является выходом системы, дополнительно вводят блок анализа режима движения, входы которого соединены с третьими выходами навигационной системы и задатчика курса и координат позиционирования, а выход соединен с дополнительным входом блока формирования сигналов управления, при этом блок анализа режима движения выполнен с возможностью определения текущего режима динамического позиционирования судна - «следование в позицию» либо «удержание позиции», а система автоматического управления движением судна в целом - с возможностью использования собственного закона регулирования в каждом режиме динамического позиционирования.
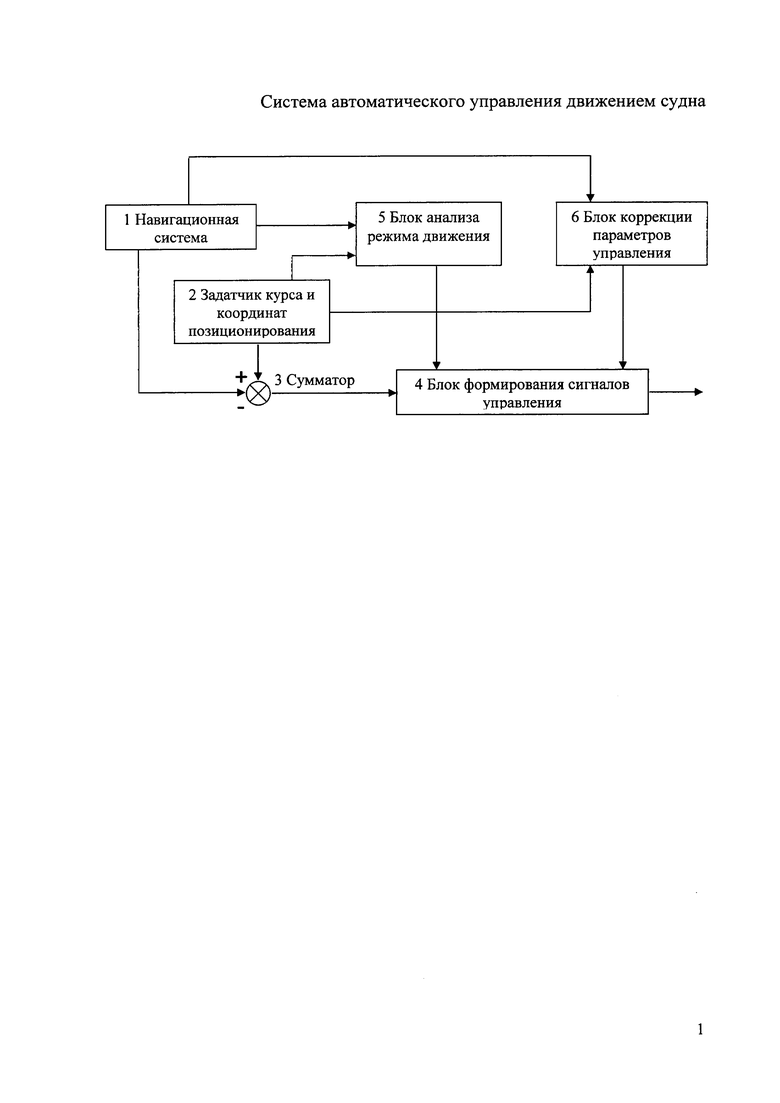
Изобретение поясняется структурной схемой, представленной на чертеже, где
1 - навигационная система;
2 - задатчик курса и координат позиционирования;
3 - сумматор;
4 - блок формирования сигналов управления;
5 - блок анализа режима движения;
6 - блок коррекции параметров управления.
Динамическое позиционирование судна при изменении позиции выполняют в два этапа: на первом этапе выполняют маневрирование судна для выхода в заданную точку позиционирования заданным курсом и предварительную стабилизацию судна в окрестностях точки позиционирования с близкой к нулю скоростью (режим САУД «следование в позицию»), а на втором этапе - устранение статических ошибок регулирования по курсу и координатам, вызванных ветро-волновыми возмущениями и морским течением, и окончательную стабилизацию судна в заданной точке (режим САУД «удержание позиции»).
Работа системы автоматического управления движением судна при динамическом позиционировании осуществляется следующим образом.
На сумматор САУД судна 3 поступают заданные курс и координаты с задатчика курса и координат позиционирования 2 вместе с курсом и координатами от навигационной системы 1, после сумматора 3 сигналы рассогласования по курсу и координатам поступают в блок формирования сигналов управления 4, выход которого является выходом системы.
Данные от навигационной системы 1 и задатчика курса и координат позиционирования 2 также поступают в блок анализа режима движения 5 и в блок коррекции параметров управления 6.
Блок анализа режима движения 5 определяет текущий режим динамического позиционирования - «следование в позицию» либо «удержание позиции» и в момент изменения режима выдает соответствующий сигнал в блок формирования сигналов управления 4 с целью формирования им собственного закона регулирования для каждого режима.
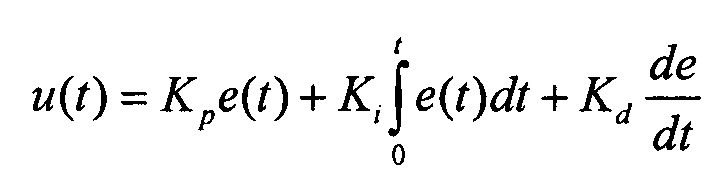
Блок формирования сигналов управления 4 представляет собой пропорционально-интегрально-дифференцирующий (ПИД) регулятор и содержит три раздельных канала продольной, поперечной и курсовой стабилизации.
Выходной сигнал регулятора по каждому каналу содержит три составляющие и определяется по формуле:
 ,
,
где Kp, Ki, Kd - коэффициенты усиления пропорциональной, интегрирующей и дифференцирующей составляющих регулятора соответственно,  , Kd=Td, где Ti,Td - постоянные интегрирования и дифференцирования САУД;
, Kd=Td, где Ti,Td - постоянные интегрирования и дифференцирования САУД;
e(t) - рассогласование регулируемого параметра.
При функционировании САУД в режиме «следование в позицию» интегрирующая составляющая не учитывается. При функционировании САУД в режиме «удержание позиции» учитываются все три составляющие закона регулирования.
Блок коррекции параметров управления 6 функционирует в режиме САУД «удержание позиции» и выполняет адаптацию САУД к изменяющимся внешним ветро-волновым возмущениям и течению за счет выдачи в блок формирования сигналов управления 4 сигналов на изменение постоянных интегрирования Ti и дифференцирования Td САУД, например, как реализовано в прототипе (Пат. РФ №2381140).
Рассмотрим функционирование САУД при изменении точки позиционирования и курса судна.
После ввода оператором в задатчик курса и координат позиционирования 2 заданных точки позиционирования и курса судна блок анализа режима движения 5 определяет, что расстояние до точки позиционирования превысило критическую величину Dmax и выдает в блок формирования сигналов управления 4 сигнал о переводе САУД из режима «удержание позиции» в режим «следование в позицию».
В режиме «следование в позицию» ПИД регуляторы блока формирования сигналов управления 4 перестают учитывать интегральные составляющие и функционируют как пропорционально-дифференцирующие регуляторы. Благодаря этому уменьшается время переходного процесса, однако появляется статическая ошибка регулирования по курсу и координатам, вызванная неучтенными ветро-волновыми возмущениями и течением.
После завершения переходного процесса блок анализа режима движения 5 выдает в блок формирования сигналов управления 4 сигнал о переводе САУД из режима «следование в позицию» в режим «удержание позиции», при этом блок коррекции параметров управления 6 на основании данных от навигационной системы 1 и задатчика курса и координат позиционирования 2 выполняет адаптацию САУД к изменяющимся внешним ветроволновым возмущениям и течению за счет выдачи в блок формирования сигналов управления 4 сигналов на изменение постоянных интегрирования Ti и дифференцирования Td САУД, например, как реализовано в прототипе (Пат. РФ №2381140).
Для определения момента завершения переходного процесса в блоке анализа режима движения 5 для каждого из трех каналов управления рассчитываются средние по модулю значения скорости изменения регулируемого параметра за время усреднения Тср. Критерием завершения переходного процесса является снижение средних значений регулируемых параметров до минимальных значений одновременно во всех каналах управления.
Одновременно с выдачей сигнала в блок формирования сигналов управления 4 о переводе САУД в режим «удержание позиции» в блоке анализа режима движения 5 рассчитывается дистанция до точки позиционирования D, представляющая собой статическую ошибку регулирования в каналах управления линейным перемещением. В зависимости от значения дистанции делается вывод об интенсивности возмущающих воздействий и рассчитываются постоянные интегрирования для каналов продольной и поперечной стабилизации по формулам:
 ,
,  ,
,
где  ,
,  - постоянные интегрирования для наихудших условий функционирования САУД.
- постоянные интегрирования для наихудших условий функционирования САУД.
Параметры Tcp, Dmax, , являются настраиваемыми и определяются экспериментально. Настройка САУД выполняется в условиях наибольших ветро-волновых возмущений и течения, отрабатываемых исполнительными средствами судна. Время усреднения Tcp определяется в зависимости от инерционности судна как объекта управления и составляет, как правило, от 30 секунд до нескольких минут. Значение критической дистанции Dmax определяется как расстояние до заданной точки позиционирования (статическая ошибка регулирования) в момент перехода от этапа «следование в позицию» к этапу «удержание позиции». Значения , подбираются экспериментально для обеспечения требуемого качества управления в условиях наибольших ветро-волновых возмущений и течения.
Система автоматического управления движением судна может быть реализована с использованием промышленных средств вычислительной техники. В качестве датчиков линейного перемещения судна могут быть использованы спутниковые или гидроакустические навигационные системы, в качестве датчиков курса - инерциальные навигационные системы, гирокомпасы или другие.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2008 |
|
RU2381140C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ СУДНА ПРИ ВОЗНИКНОВЕНИИ ШКВАЛА | 2009 |
|
RU2392182C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗМУЩЕНИЙ | 2012 |
|
RU2492105C1 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |
Изобретение относится к области автоматического управления движением судов при их динамическом позиционировании при решении задач поиска и обследования подводных объектов, характеризующихся частой сменой точек позиционирования. В систему автоматического управления движением (САУД) судна вводят блок анализа режима движения, который выполнен с возможностью определения текущего режима динамического позиционирования судна - «следование в позицию» либо «удержание позиции», а САУД в целом - с возможностью использования собственного закона регулирования в каждом режиме динамического позиционирования. Обеспечивается возможность автоматического выхода в заданную позицию с ее удержанием при частой смене точек позиционирования 1 ил.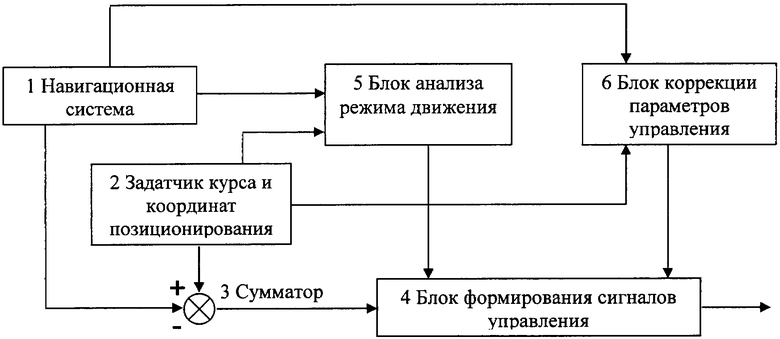
Система автоматического управления движением судна, содержащая навигационную систему, задатчик курса и координат позиционирования, сумматор, блок формирования сигналов управления, блок коррекции параметров управления, в которой первые выходы навигационной системы и задатчика курса и координат позиционирования соединены с первым и вторым входами сумматора, выход которого соединен с первым входом блока формирования сигналов управления, входы блока коррекции параметров управления соединены со вторыми выходами навигационной системы и задатчика курса и координат позиционирования, а выход соединен со вторым входом блока формирования сигналов управления, выход которого является выходом системы, отличающаяся тем, что в систему дополнительно введен блок анализа режима движения, входы которого соединены с третьими выходами навигационной системы и задатчика курса и координат позиционирования, а выход соединен с дополнительным входом блока формирования сигналов управления, при этом блок анализа режима движения выполнен с возможностью определения текущего режима динамического позиционирования судна - «следование в позицию» либо «удержание позиции», а система в целом - с возможностью использования собственного закона регулирования в каждом режиме динамического позиционирования.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2008 |
|
RU2381140C1 |
| Система автоматической стабилизации судна без хода | 1976 |
|
SU583032A1 |
| Камерная печь для без окислительного нагрева изделий из нержавеющей стали | 1960 |
|
SU138640A1 |
| Токарный резец | 1924 |
|
SU2016A1 |

