to Ю J
со 1C
Изобретение относится к строительным и дорожным машинам, в частности к автоматизированным мелиоративным машинам- планировш,икам, дреноукладчикам, бетоноукладочным комплексам.
Известно устройство управления рабочим органом землеройной машины, включаюш,ее маятниковый датчик положения, сравнивающий элемент, усилитель-преобразователь, электрогидравлический распределитель, гидроцилиндр положения рабочего органа, блок задержки и переключатель 1.
Суш,ественным недостатком этого устройства является необходимость разделения сигнала датчика на две составляющие: полезный сигнал и сигнал помехи. Это требование либо невыполнимо вообще при совпадении спектров частот полезного сигнала и сигнала помехи, либо выполнимо в исключительных случаях, когда входной сигнал характеризуется преимущественно одной частотой, значительно отличающейся от частоты помехи.
Известно устройство управления рабочим органом землеройной машины, содержащее дифференцирующий усилитель, релейный элемент и последовательно соединенны-е маятниковый датчик положения рабочего органа, элемент сравнения, усилитель-преобразователь, переключатель и исполнительный механизм, вход релейного элемента соединен с выходом дифференцирующего усилителя, к входу которого подключен выход маятникового датчика положения рабочего органа, при этом релейный элемент соединен с переключателем через элемент задержки 2.
Недостатком известного устройства является низкое быстродействие, вследствие чего инерционная помеха за время срабатывания системы успевает пройти на ее выход. Кроме того, наличие электромеханических реле снижает надежность устройства и, в частности, время наработки на отказ.
Цель изобретения - повышение помехоустойчивости и быстродействия.
Поставленная цель достигается тем, что устройство управления рабочим органом землеройной мащины, содержащее дифференцирующий усилитель, релейный элемент и последовательно соединенные маятниковый датчик положения рабочего органа, элемент сравнения, усилитель-преобразователь, переключатель и исполнительный механизм, вход релейного элемента соединен с выходом дифференцирующего усилителя, к входу которого подключен выход маятникового датчика положения рабочего органа, снабжено последовательно соединенными коммутирующим элементом и усилителем, выход которого подключен к входу релейного элемента, а выход релейного элемента подключен к входу коммутирующего элемента и к другому входу переключателя.
При этом коммутирующий элемент выполнен в виде двух ключей, соединенных последовательно один с другим через RC-цепь, причем управляющие входы обоих ключей
соединены параллельно и являются входом коммутирующего элемента.
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - пример реализации принципиальной схемы на бесконтактных элементах применительно к планировщику; на фиг. 3 - пример реализации принципиальной схемы на электромеханическом реле применительно к планировщику. Устройство выполнено следующим образом.
Рабочий орган 1 соединен с маятниковым датчиком 2 положения рабочего органа. Выход датчика 2 соединен с входом элемента 3 сравнения, выход которого соединен с усилителем-преобразователем 4. Выход усилителя 4 соединен с исполнительным механизмом 5, выход исполнительного механизма соединен с рабочим органом.
Выход датчика 2 положения соединен также с входом дифференцирующего усилителя 6, выход которого включен на вход
релейного элемента 7. Выход релейного элемента 7 соединен с входом коммутирующего элемента 8, а выход последнего через усилитель 9 соединен с выходом дифференцирующего усилителя бис входом релейного элемента 7. Выход последнего соединен также с входом переключателя 10, который соединяет усилитель 4 и исполнительный механизм 5.
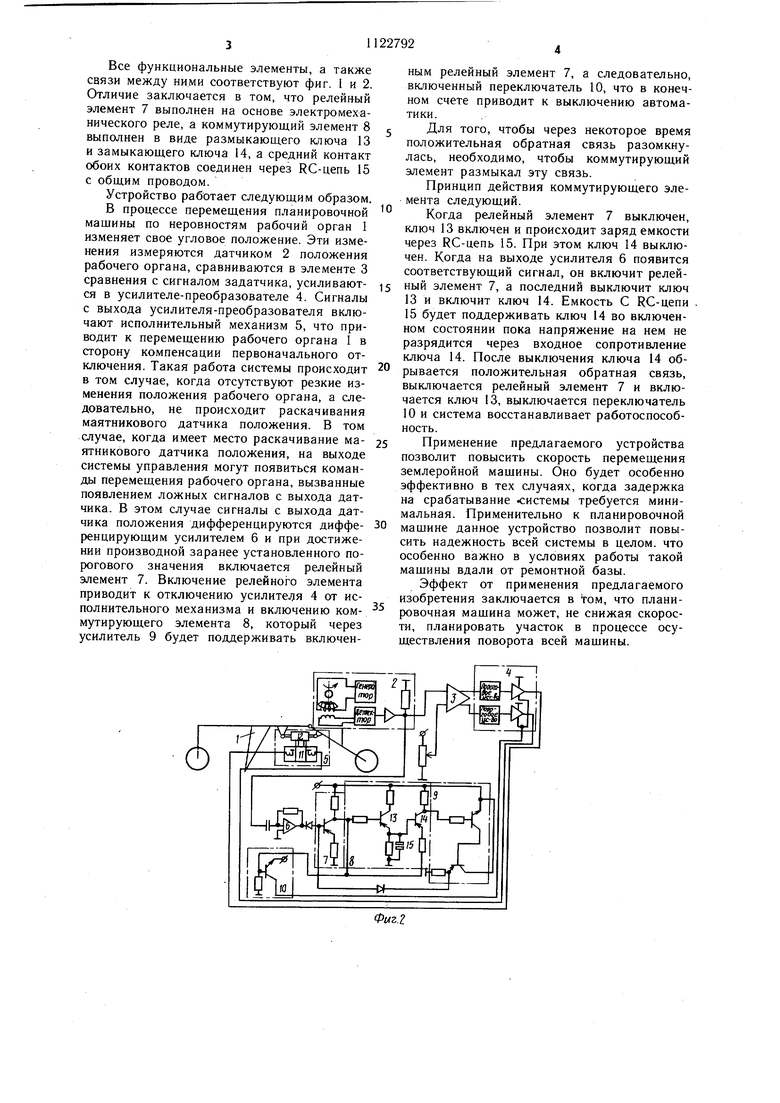
На фиг. 2 представлен пример реализа ции принципиальной схемы на бесконтактных элементах применительно к планировщику. Датчик 2 положения бесконтактного типа соединен с элементом 3 сравнения, выход которого соединен с усилителем-преобразователем 4, выход которого соединен
с исполнительным механизмом 5, включающим электрогидравлический золотник 11 и гидроцилиндр 12. Выход датчика 2 связан также с входом дифференцирующего усилителя 6, выход которого соединен с входом релейного элемента 7, который соединен с входом коммутирующего элемента 8, а выход этого элемента соединен через усилитель 9 с входом релейного элемента 7, выход которого соединен также с входом переключателя 10. Коммутирующий элемент
0 8 включает размыкающий транзисторный ключ 13, замыкающий транзисторный ключ 14, соединенные один с другим последовательно через RC-цепь 15.
На фиг. 3 изображен пример реализации 5 принципиальной схемы устройства на основе электромеханического переключающего реле также применительно к схеме планировщика.
Все функциональные элементы, а также связи между ними соответствуют фиг. 1 и 2. Отличие заключается в том, что релейный элемент 7 выполнен на основе электромеханического реле, а коммутирующий элемент 8 выполнен в виде размыкающего ключа 13 и замыкающего ключа 14, а сред.ний контакт обоих контактов соединен через RC-цепь 15 с общим проводом.
Устройство работает следующим образом.
В процессе перемещения планировочной мащины по неровностям рабочий орган 1 изменяет свое угловое положение. Эти изменения измеряются датчиком 2 положения рабочего органа, сравниваются в элементе 3 сравнения с сигналом задатчика, усиливаются в усилителе-преобразователе 4. Сигналы с выхода усилителя-преобразователя включают исполнительный механизм 5, что приводит к перемещению рабочего органа 1 в сторону компенсации первоначального отключения. Такая работа системы происходит в том случае, когда отсутствуют резкие изменения положения рабочего органа, а следовательно, не происходит раскачивания маятникового датчика положения. В том случае, когда имеет место раскачивание маятникового датчика положения, на выходе системы управления могут появиться команды перемещения рабочего органа, вызванные появлением ложных сигналов с выхода датчика. В этом случае сигналы с выхода датчика положения дифференцируются дифференцирующим усилителем 6 и при достижении производной заранее установленного порогового значения включается релейный элемент 7. Включение релейного элемента приводит к отключению усилителя 4 от исполнительного механизма и включению коммутирующего элемента 8, который через усилитель 9 будет поддерживать включенным релейный элемент 7, а следовательно, включенный переключатель 10, что в конечном счете приводит к выключению автоматики.
Для того, чтобы через некоторое время положительная обратная связь разомкнулась, необходимо, чтобы коммутирующий элемент размыкал эту связь.
Принцип действия коммутирующего элемента следующий.
Когда релейный элемент 7 выключен, ключ 13 включен и происходит заряд емкости через RC-цепь 15. При этом ключ 14 выключен. Когда на выходе усилителя 6 появится соответствующий сигнал, он включит релейный элемент 7, а последний выключит ключ 13 и включит ключ 14. Емкость С RC-цепи 15 будет поддерживать ключ 14 во включенном состоянии пока напряжение на нем не разрядится через входное сопротивление ключа 14. После выключения ключа 14 обрывается положительная обратная связь, выключается релейный элемент 7 и включается ключ 13, выключается переключатель 10 и система восстанавливает работоспособность.
Применение предлагаемого устройства позволит повысить скорость перемещения землеройной мащины. Оно будет особенно эффективно в тех случаях, когда задержка на срабатывание системы требуется минимальная. Применительно к плакировочной машине данное устройство позволит повысить надежность всей системы в целом, что особенно важно в условиях работы такой мащины вдали от ремонтной базы.
Эффект от применения предлагаемого изобретения заключается в том, что планировочная мащина может, не снижая скорости, планировать участок в процессе осуществления поворота всей мащины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления рабочим органом землеройной машины | 1979 |
|
SU901415A1 |
| Устройство стабилизации положенияРАбОчЕгО ОРгАНА зЕМлЕРОйНыХ МАшиН | 1979 |
|
SU804791A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| Система автоматического управления землеройной машины | 1987 |
|
SU1509489A1 |
| Устройство управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1342981A1 |
| Устройство стабилизации угла наклона рабочего органа планировочной машины | 1984 |
|
SU1167279A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство для регулирования температуры в термостате | 1983 |
|
SU1104480A1 |
| Способ управления положением рабочего органа землеройной машины | 1982 |
|
SU1105576A1 |
| Устройство для автоматической стабилизации положения рабочего органа дорожно-строительных машин | 1979 |
|
SU883280A1 |

1. УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНОЙ МАШИНЫ, содержащее дифференцирующий усилитель, релейный элемент и последовательно соединенные маятниковый датчик положения рабочего органа, элемент сравнения, усилитель-преобразователь, переключатель и исполнительный ме.ханизм, вход релейного элемента соединен с выходом дифференцирующего усилителя, к входу которого подключен выход маятникового датчика положения рабочего органа, отличающееся тем, что, с целью повыщения помехоустойчивости и быстродействия, оно снабжено последовательно соединенными коммутирующим элементом и усилителем, выход которого подключен к входу релейного элемента, а выход релейного элемента подключен к входу коммутирующего элемента и к другому входу переключателя. 2. Устройство по п. 1, отличающееся тем, что коммутирующий элемент выполнен в виде двух ключей, соединенных последовательно один с другим через RC-цепь,- причем управляющие входы обоих ключей соединены параллельно и являются входом коммутирующего элемента.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА СТРОИТЕЛЬНО-ДОРОЖНОЙ Л1АШИНЫ | 1972 |
|
SU420737A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления рабочим органом землеройной машины | 1979 |
|
SU901415A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
