(54) МОРСКАЯ СТАБИЛИЗИРОВАННАЯ ПЛАТФОРМА

| название | год | авторы | номер документа |
|---|---|---|---|
| ТУРБОДИНАМИЧЕСКОЕ СУДНО В.С.ГРИГОРЧУКА | 1997 |
|
RU2128597C1 |
| МНОГОКОРПУСНОЕ ПОЛУПОГРУЖЕННОЕ СУДНО | 2005 |
|
RU2287448C1 |
| Система автоматического управления стабилизированной платформой многокорпусного морского судна | 1980 |
|
SU1047778A1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ СУДНА НА ПОГРУЖЕННЫХ ОПОРАХ | 2008 |
|
RU2375239C1 |
| Многокорпусное стабилизированное судно | 1981 |
|
SU1020305A1 |
| СПОСОБ ДВИЖЕНИЯ СУДНА НА ПОГРУЖЕННЫХ ОПОРАХ | 2008 |
|
RU2375238C1 |
| Тримаран | 1975 |
|
SU984917A1 |
| ГИДРОДИНАМИЧЕСКОЕ СУДНО | 2012 |
|
RU2495782C1 |
| МНОГОАГРЕГАТНАЯ ПЛАВУЧАЯ ПРИБРЕЖНАЯ ВЕТРОФЕРМА | 2002 |
|
RU2258633C2 |
| ПЛАВУЧАЯ ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2173280C2 |
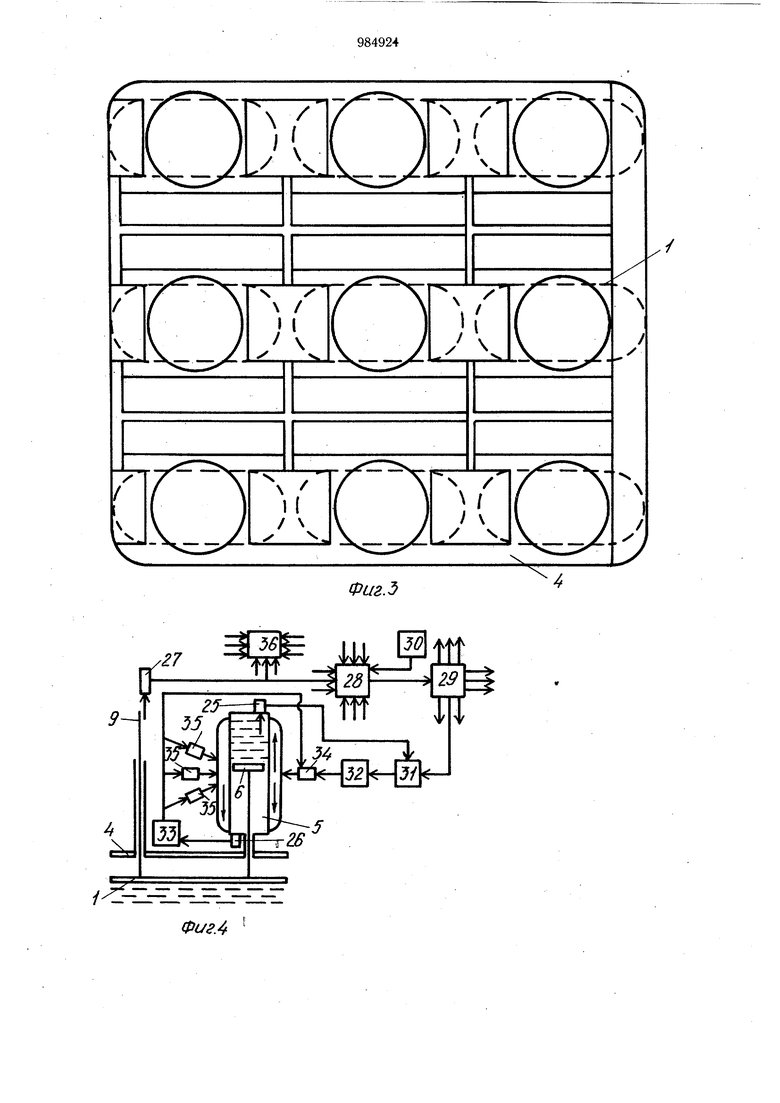



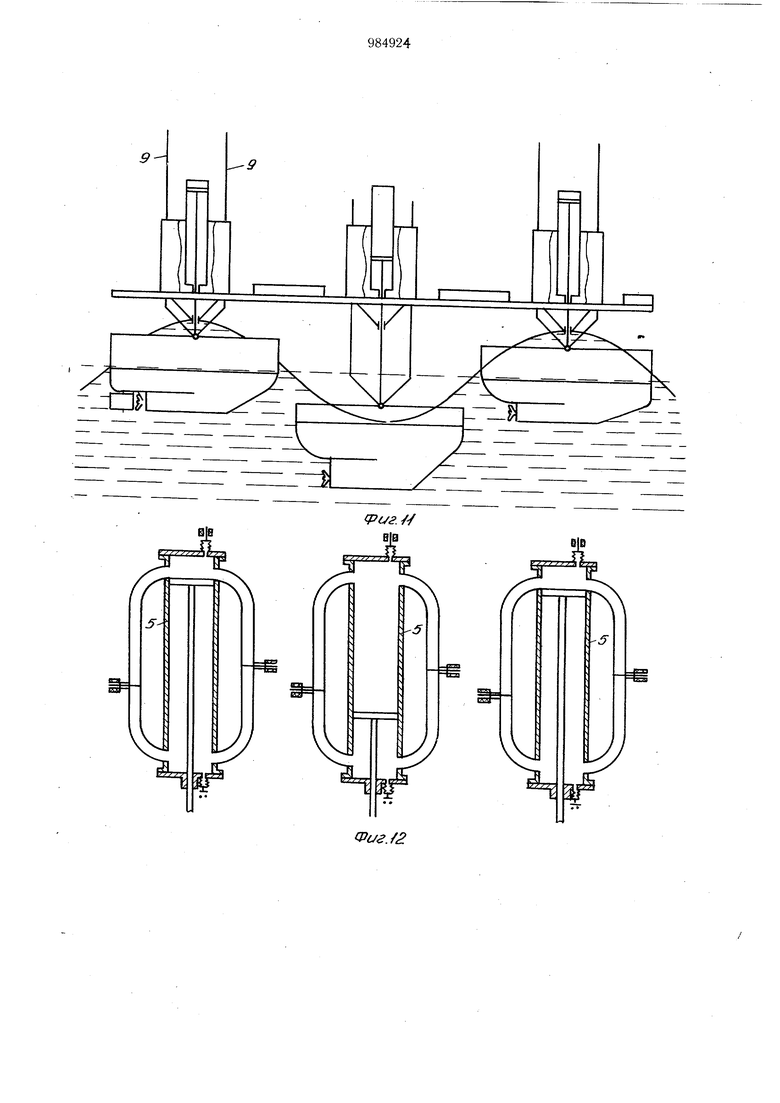
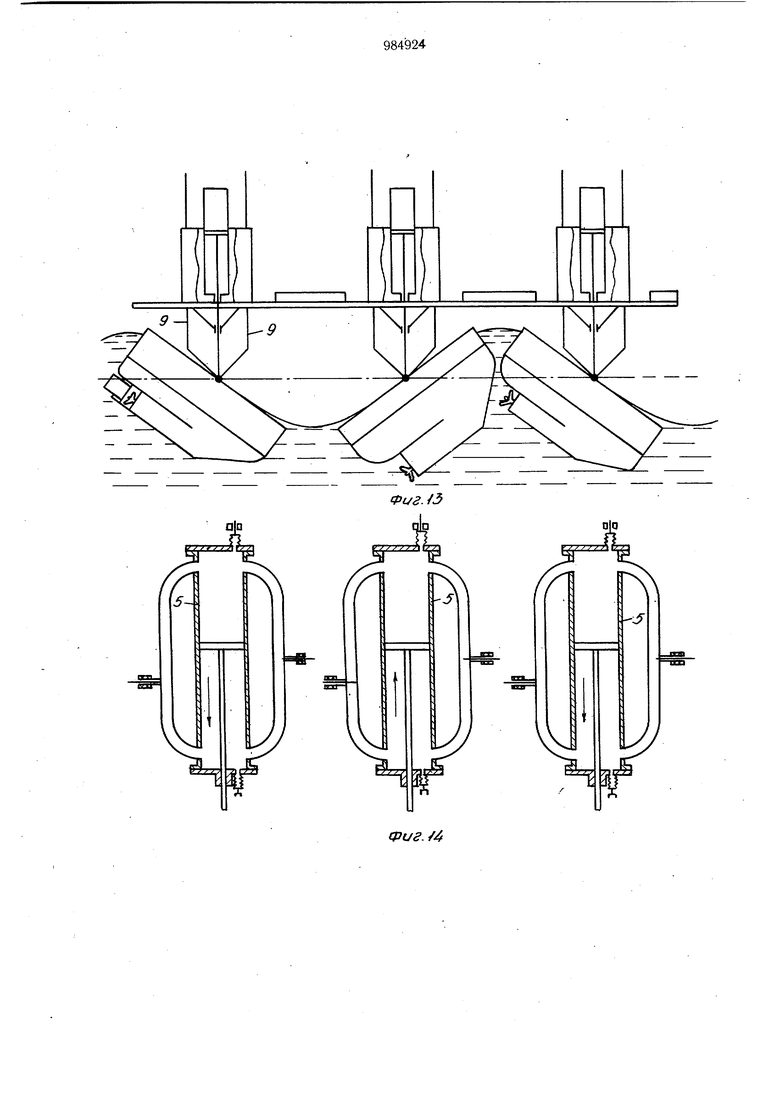
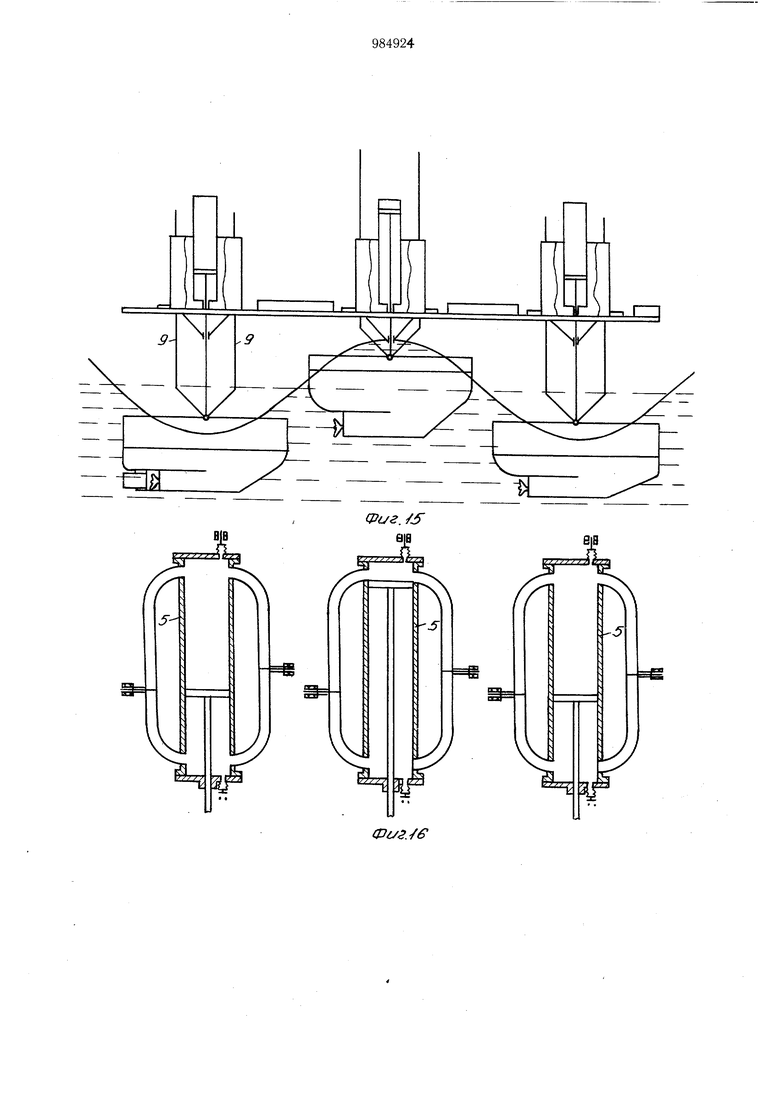
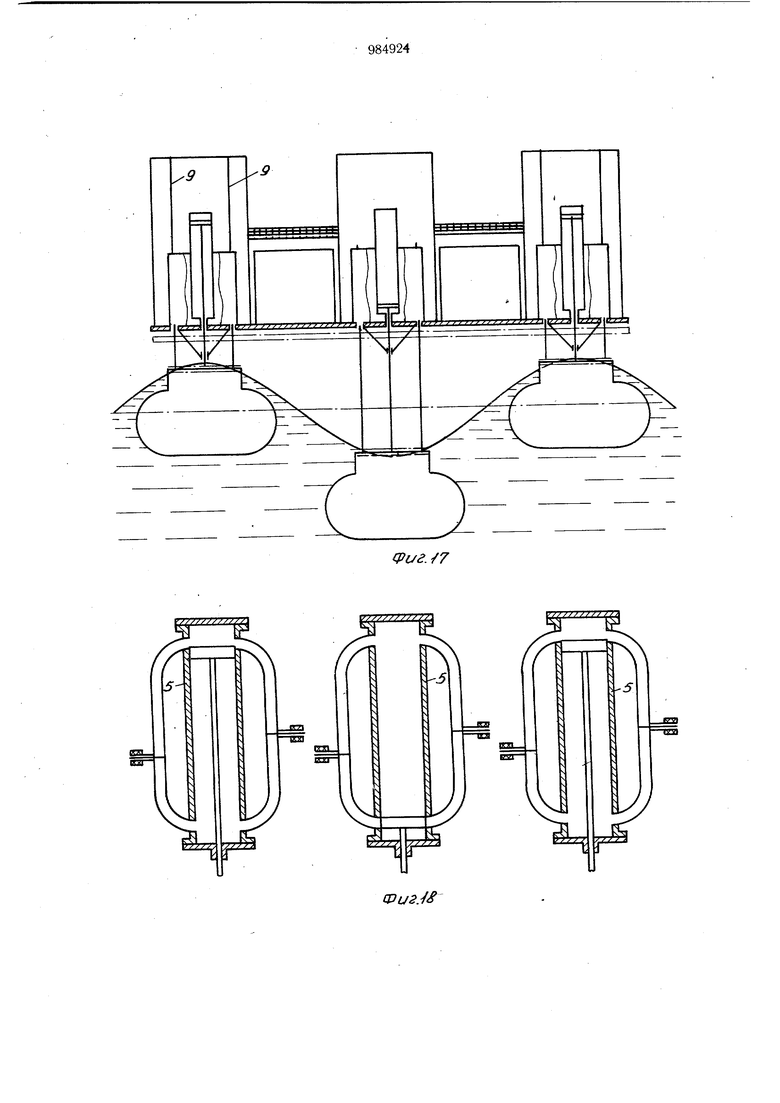

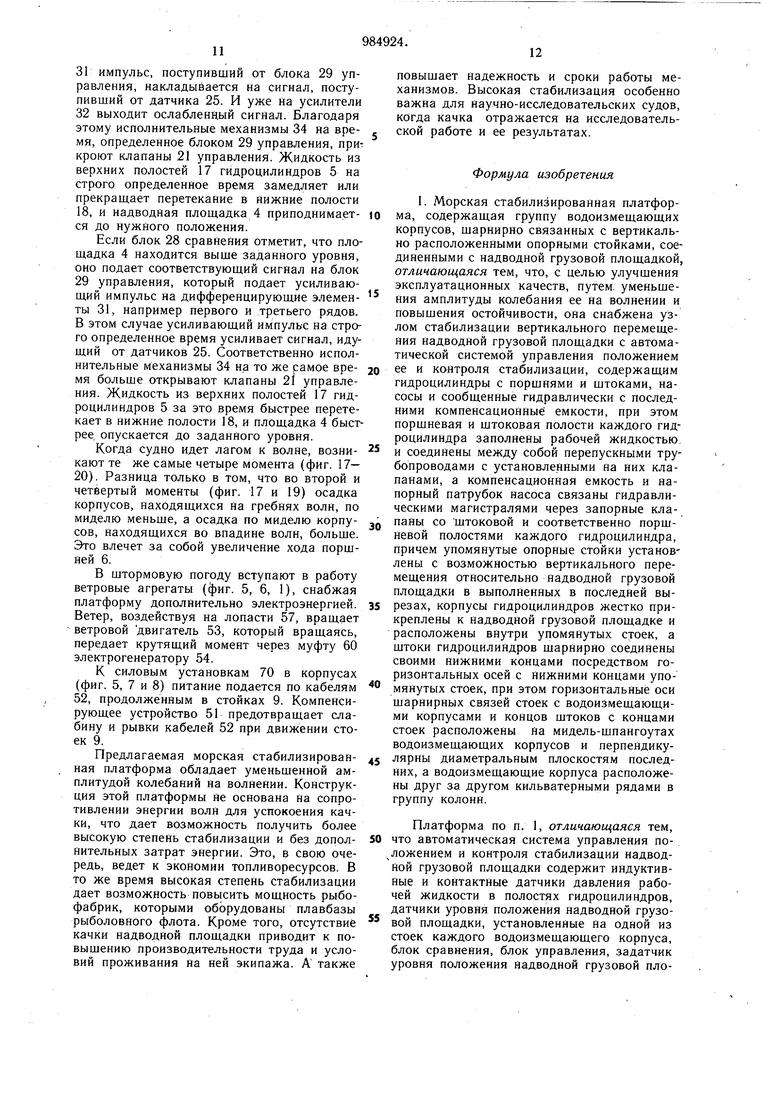
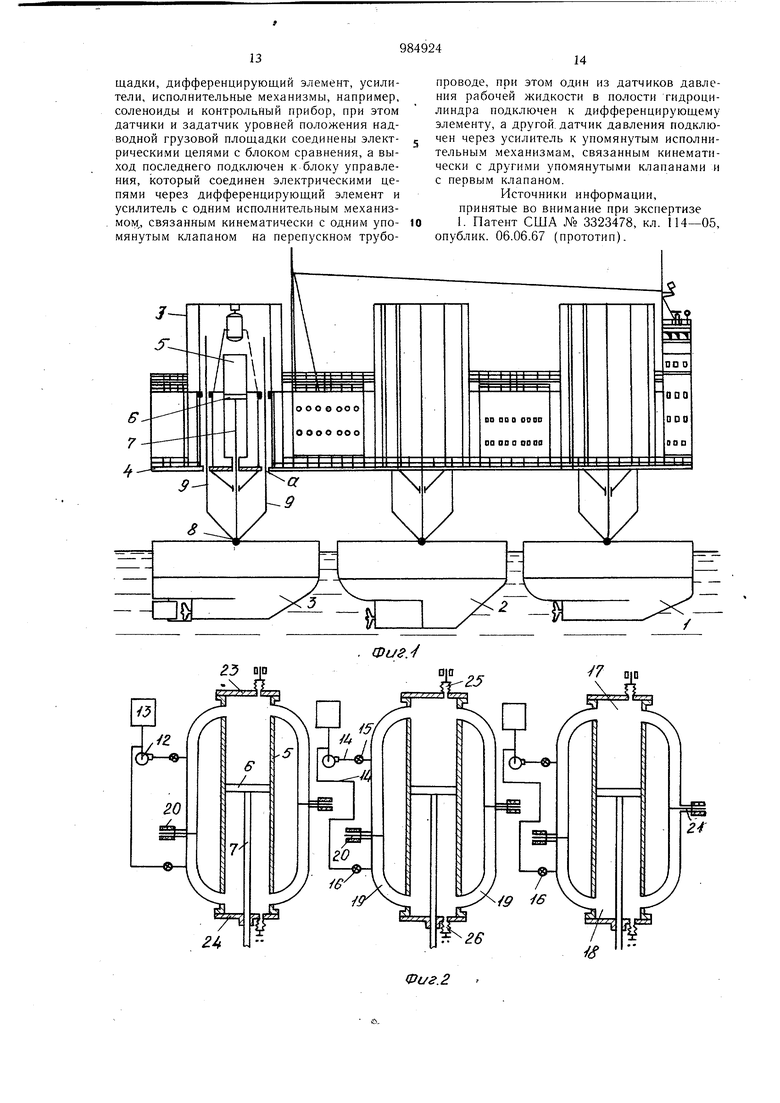
Изобретение относится к судостроению, в частности к морским самоходным полупогруженным платформам. Наиболее близкой по технической сущности к предлагаемой является морская самоходная полупогруженная платформа, содержащая группу водоизмещающих корпусов, шарнирно связанных с вертикально расположенными опорными стойками, соединенными с надводной грузовой площадкой 1. Недостаток известной морской самоходной полупогруженной платформы - низкие эксплуатационные качества вследствие большой амплитуды колебания ее на волнении и малой остойчивости. Цель изобретения - улучшение эксплуатационных качеств платформы путем уменьшения амплитуды колебания ее на волнении и повышения остойчивости. Поставленная, цель достигается тем, что морская стабилизированная платформа, содержащая группу водонзмещ ющих корпусов, шарнирно связанных с вертикально расположенными опорными стойками, соединенными с надводной грузовой площадкой, снабжена узлом стабилизации вертикального перемещения надводной грузовой площадки с автоматической системой управления положением ее и контроля стабилизации, содержащим гидроцилиндры с поршнями и штоками, насосы и соединенные гидравлически с последними компенсационные емкости, при этом поршневая и штоковая полости каждого гидроцилиндра заполнены рабочей жидкостью и соединены между собой перепускными трубопроводами с установленными на них клапанами, а компенсационная емкость и напорный патрубок насоса связаны гидравлическими магистралями через запорные клапаны со штоковой и соответственно поршневой полостями каждого гйдроцилиндра, причем упомянутые опорные стойки установлены с возможностью вертикального перемещения относительно надводной грузовой площадки в выполненных в последней вырезах, корпусы гидроцилиндров жестко прикреплены к надводной грузовой площадке и расположены внутри упомянутых стоек, а штоки гидроцилиндров шарнирно соединены своими- нижними концами посредством горизонтальных осей с нижними концами упомянутых стоек, при этом горизонтальные оси щарнирных связей стоек с водоизмещающими корпусами и концов штоков с концами стоек расположены на мидель-шпангоутах водоиз-мещающих корпусов и перпендикулярны диаметральным плоскостям последних, а водоизмепдающие корпуса расположены друг за другом кильватерными рядами в группу колонн. Кроме того, автоматическая система управления положением и контроля стабилизации надводной грузовой площадки содержит индуктивные и контактные датчики давления рабочей жидкости в полостях гидроцилиндров, датчики уровня- положения надводной грузовой площадки, установленные на одной из стоек каждого водоизмещающего корпуса, блок сравнения, блок управления, задатчик уровня положения надводной грузовой площадки, дифференцирующий элемент, усилители, исполнительные механизмы, например, соленоиды и контрольный прибор, при этом датчики и задатчик уровней положения надводной грузовой площадки соединены электрическими цепями с блоком сравнения, а выход последнего подключен к блоку управления, который соединен электрическими цепями через дифференцирующий элемент и усилитель с одним исполнительным механизмом, связанным кинематически с одним упомянутым клапаном на перепускном трубопроводе, при этом один из датчиков давления рабочей жидкости в полости гид.роцилиндра подключен к дифференцирующему элементу, а другой датчик давления подключен через усилитель к упомянутым исполнительным механизмам, связанным кинематически с другими упомянутыми клапанами и с первым клапаном. На фиг. 1 схематично изображена морская стабилизированная платформа, общий вид с правого борта, с частичным разрезом по диаметральной плоскости; на фиг. 2 - гидросистемы с узлом стабилизации вертикального перемещения надводной грузовой площадки в одной из колонн корпусов. Положение каждого держащего гидромеханизма соответствует исходному моменту согласно фиг. 1; на фиг. 3 - платформа, вид в плане (пунктиром показаны водоизмещающие корпуса); на фиг. 4 - структурная схема автоматической системы управления положением надводной площадки и контроля стабилизации ее; на фиг. 5 - стабилизирующий узел с вырезом 90° гидроцилиндра и надводной площадки и с вырезом в кожухе, продольный разрез; на фиг. 6 - то же, разрез А-А на фиг. 5; на фиг. 7 - корпус среднего ряда, разрез по мидель-штангоуту с показом щарнирного узла; на фиг. 8 - то же, разрез по диаметральной плоскости (полая ось выступает от плоскости разреза); на фиг. 9 - схематичное изображение платформы в следующий момент, носом к волне, вид с правого борта (пунктиром обозначен уровень спокойной воды); на фиг. 10 - схема работы гидросистемы в данный момент времени; на флг, 11 - схематичное изображение платформы в другой момент, вид с правого борта (в кожухах вырезы с показом разреза гидроцилиндров); на фиг. 12 - схема работы гидросистемы в момент, согласно фиг. 11; на фиг. 13 - то же, что на фиг. 11 в следующий момент положения платформы носом к волне; на фиг. 14- схема работы гидросистемы в момент, показанный на фиг. 13; на фиг. 15 - то же, что на фиг. 11 в другой момент положения платформы носом к волне; на фиг. 16 - схема работы гидросистемы в момент, показанный на фиг. 15; на фиг. 17 - то же, что на фиг. 11 в положении платформы лагом к волне, вид с носа, разрез по мидель-щпангоуту корпусов среднего ряда (пунктиром обозначено положение надводной площадки, показанное на фиг. 1, 9, 11, 13 и 15). На фиг. 18 - схема работы гидросистемы в момент, показанный на фиг. 17; на фиг. 19 - то же, что и на фиг. 17 в момент положения платформы лагом к волне (разрез стабилизирующих элементов по мидель-щпангоуту корпусов первого ряда, положение надводной площадки соответствует положению, обозначенному пунктиром На фиг. 17); на фиг. 20 - схема работы гидросистемы в момент, показанный на фиг. 19 (исполнительные механизмы клапанов не показаны). Водоизмещающие корпуса 1-3 морской стабилизированной платформы (фиг. 1, 3, 9, 11, 13, 15, 17, 19) расположены в три ряда тремя кильватерными колоннами. Минимальное количество корпусов - девять. Но большее количество корпусов, например двенадцать, шестнадцать, улучшает стабилизацию. При девятикорпусном варианте водоизмещение корпусов второго ряда больше, чем водоизмещение корпусов первого или третьего ряда. Соответственно и двигатели корпусов второго ряда мощнее. Все девять корпусов несут на себе надводную грузовую площадку 4, на которой жестко, закреплены гидроцилиндры 5 узла стабилизации вертикального ее перемещения (фиг. 1, 2, 4-6, 9-20), хаполненные рабочей жидкостью, например маслом. Внутри гидроцилиндров находятся плотно прилегающие к их стенкам поршни 6. С ними жестко соединены штоки 7. Противоположные концы щтоков 7 связаны с корпусами шарнир};ыми связями 8, шарнирными связями 8 соединены также стойки 9, имеющие возможность осевого перемещения в вырезах а площадки внутри направляющих 10, 11, жестко закрепленных на надводной площадке 4. Штоки 7 вместе со стойками 9 в пространстве от шарнирной связи 8 до направляющих 10 составляют несущую систему. Оси шарнирных связей 8 стоек с водоизмещающими корпусами и концов щтоков ,с концами стоек расположены на мидель-шпангоутах водоизмещающих корпусов и перпендикулярны диаметральным плоскостям последних.
Гидроцилиндры 5 с поршнями 7, направляющиМи 10 и 11 и со всей их арматурой составляют стабилизирующий узел вертикального перемещения грузоЕГОй площадки 4. ГиДравлическая система (фиг. 2) состоит из гидроцнлиндра 5 с порщнем 6 (с которым жестко связан щток 7), насоса 12 высокого давления, компенсационной емкости 13, трубопровода 14, запорных клапанов 15 и 16. Гидроцилиндр 5 расположен внутри стоек 9.
Верхняя порщневая полость 17 каждого гидроцилиндра 5 соединена с его нижней щтоковой полостью 18, например четырьмя перепускными трубопроводами 19 (фиг. 2, 5, 6, 10, 12, 14, 16, 18, 20), снабженными клапанами 20 и 21 управления и резервными клапацами 22 (фиг. 5). Гидроцилиндр 5 снабжен верхней и нижней крыщками 23 и 24. Гидроцилиндр 5 с перепускными трубопроводами 19,,их клапанами 20-22 и порщнем 7 составляют гидромеханизм.
Автоматическая система управления положения и контроля стабилизации надводной площадки (фиг. 4) включает в себя индуктивные датчики 25 давления на верхних Крыщках 23 гидроцилиндров 5, контактные датчики 26 давления на нижних крыщках гидроцилиндров, датчики 27 уровня на верхнем конце одной из стоек 9, блок 28 сравнения, блок 29 управления, задатчик 30 уровня положения площадки, дифференцирующий элемент 31, усилители 32 и 33, исполнительные механизмы 34 и 35, например соленоиды, и контрольный прибор 36. Индуктивный датчик 25 и контактный датчик 26, датчик 27 уровня, дифференцирующие элементы 31, усилители 32 и 33 и исполнительные механизтйы 34 и 35, например по четыре исполнительных механизма, содержит каждый стабилизирующий узел. Датчики 27 и задатчик 30 уровня положения подводной грузовой цлощадки соединены электрическими цепями с блоком 28 сравнения, а выход последнего подключен к блоку 29 управления, который соединен электрическими цепями через дифференцирующий элемент 31 и усилитель 32 с одним исполнительным механизмом 34, связанным кинематически с одним упомянутым клапаном 21 на перепускном трубопровбде. Один, из датчиков 25 давления рабочей жидкости в полости гидроцилиндра подключен к дифференцирующему элементу 31, а другой датчик 26 давления подключен через усилитель 33 к упомянутым исполнительным механизмам 35 и,34, связанным кинематически с клапанами 15, 16, 20 и 21.
Блок 28 сравнения, блок 29 управления, задатчик 30 и контрольный прибор 36 едины на все стабилизирующие элементы.
Каждый стабилизирующий элемент (фиг. 5 и 6) находится внутри кожуха 37, жестко закрепленного на надводной площадке 4, на которой также жестко закреплены, например восемь фундаментных радиальных стоек 38, 39, которые жестко прикреплены
также и к кожуху 37. Кожух 37 вместе с фундаментными стойками 38 и 39 предназначен для удержания гидроцилиндра 5, они составляют крепление-системы. Гидроцилиндры 5 имеют возможность упора своими крыщками 24 в выступы 40 фундаментных стоек 38. К стойкам 38 и 39 гидроцилиндры 5 прикреплены по всей высоте во многих местах 41. Верхние выступы фундаментных стоек 38 представляют собой прижимные устройства 42. Нижние крыщки 24 гидроцилиндра 5 в месте прохода через них щтока 7 содржат уплотнительные устройства 43. А надводная площадка 4 в месте прохода через нее штока 7 содержит направляющие устройства 44. С нижней стороны к надводной площадке 4
жестко прикреплены по четыре кронштейна 45, содержащие опорно-направляющие устройства 46 для штока 7.
К надводной площадке 4, кожухам 37 и фундаментным стойкам 38 жестко прикреплены тормозные устройства 47 стоек 9.
На каждом стабилизирующем блоке датчик 27 уровня, закрепленный на одной из стоек 9, представляет собой стальную ленту, противоположный конец которой соединен с рулеткой 48. В месте присоединения к стойке 9 стальная лента имеет контакты 49, а в верхней части (в месте крайнего верхнего положения стоек 9) - вторые контакты 50. В верхней же части, в местах верхнего крайнего положения стоек9 имеется компенсационное устройство 51. Стойки 9 полые и в
полостях размещены кабели 52. Шток 7 также полый.
Здесь же на каждом стабилизирующем элементе расположен ветровой агрегат, включающий в себя ветровой двигатель 53 с генератором 54. Ветровой двигатель 53 представляет собой ротор, закрывающий стабилизирующий блок. Это барабан 55 с днищем 56, по всей наружной цилиндрической поверхности которого расположены по эвольвенте и жестко закреплены лопасти 57. Ветровой двигатель 54 покоится с возможностью осевого вращения на опорах 58 и 59 качения часть которых закреплена на кожухе 37. Кроме того, он имеет опору 60, расположенную в центре днища 56, которая одновременно является и муфтой сцепления с валом генератора 54, который при помощи жестких лап 61 закреплен на фундаментных стойках 39.
Полая ось 62 (фиг. 7 и 8) шарнирной связи 8, которой снабжен каждый корпус, находится в опорах 63-65, закрепленных в корпусе 2 и снабженных уплотнительными устройствами 66. На полой оси 62 жестко закреплены упоры 67, с которыми жестко соединены торцы носовой и кормовой стоек 9. Здесь же имеются амортизаторы 68. Торцы бортовых стоек 9 жестко закреплены непосредственно на полой оси 62.
Каждый водоизмещающий корпус герметичен. Он разбит на водонепроницаемые отсеки и имеет двоичное дно. В нижнем кормовом водонепроницаемом отсеке 69 находится силовая установка 70, например электродвигатель. В нижнем носовом водонепроницаемом отсеке 71 расположены балластно-осуШительные средства 72. Пунктирная линия на фиг. 8 показывает положение верхней палубы корпуса при максимальном дифференте (В практике дифферент такой величины встречается крайне редко).
Морская стабилизированная платформа работает следующим образом.
На спокойной воде надводная площадка 4 может занимать любой уровень в пространстве. На фиг. 1 надводная площадка 4 занимает среднее положение. При этом все клапаны управления 20 и 21 на перепускных трубопроводах 19 (фиг. 2) закрыты. Поэтому порщни 6 не могут сдвинуться ни вверх ни вниз. Вес всей надводной площадки 4 передается через жидкость в гидроцилиндрах 5 на дно поршней 6. А те в свою очередь, передают нагрузку через щтоки 7 корпусам (фиг I-20). Поэтому в верхних полостях 17 гидроцилиндров 5 держится больщое давление. По этой причине крепление верхних крыщек 23 гидродилиндров усилено прижимными устройствами 42.
Каждый щток 7 (наиболее ответственная и напряженная деталь) передает корпусу девятую часть веса надводной площадки. Поскольку наружная поверхность каждого щто ка 7 подвержена воздействию морской воды, она должна иметь антикоррозийное покрытие.
Для того, чтобы разгрузить щтоки 7 при фиксированном положении надводной площадки 4 (фиг. 1), стойки 9 снабжены тормозными устройствами 47 (фиг. 5). С их помощью стойки 9 стопорят, и осевая нагрузка распределяется равномерно на всю несущую систему.
Корпусам нагрузка передается через щарнирную связь 8 (фиг. 7 и 8), т. е. через полую ось 62 и ее опоры 63-65, закрепленные на Наборе корпуса. Полая ось 62 также работает в жестких условиях, поэтому и к ней предъявляются особые требования.
Для того, чтобы поднять надводную площадку 4 в верхнее положение, отдают устройства 47 (фиг. 5), открывают на гидросистемах запорные клапаны 15 и 16 (фиг. 2) и одновременно запускают насосы 12 высокого давления. В верхних полостях 17 гидроцилиндров 5 давление жидкости повышается. Посольку поршни 6, будучи связанными с .корпусами штоками 7, не имеют возможности перемещения, вверх будут перемещаться гидроцилиндры 5 вместе с надводной площадкой 4. При этом жидкость из нижних полостей 18 гидроцилиндров 5 будет вытесняться через запорные клапаны 16
в компенсационные емкости 13, откуда она забирается насосом 12 высокого давления. Если нужно опустить надводную площадку 4, отдают тормозные устройства 47 и приоткрывают клапан 21 управления. Жидкость, находящаяся под давлением, из верхних полостей 17 гидроцилиндров 5 перетекает в их нижние полости 18, где давление незначительно. Надводная площадка 4 опустится своим весом, после чего клапан 21 управле,ния закрывают и стопорят стойки 9.
В спокойную погоду платформа может плавать с надводным бортом корпусов. Но в щторм надводный борт корпусов обязательно должен отсутствовать. Наиболее рационально загружать платформу .до нулевого надводного борта, который можно получить и затоплением балластных отсеков корпусов. Благодаря отсутствию надводного борта в шторм исключаются динамические нагрузки на корпуса, а соответственно и на несущие системы. Исключаются также дополнительные изгибающие моменты на несущих системах при дифферентах корпусов. А при движении лагом к волне уменьшаются кренящие усилия на корпусах.
Стойки 9, образуя вместе со штоком 7 несущую систему, создают необходимую жесткость при изгибающих моментах.
В первый момент при движении носом к волне (фиг. 9) первый и .третий ряды корпусов восходят на волну, а второй ряд корпусов сходит с волны. Все корпуса находятся на склоне волны и имеют дифферент. Порщни 6 гидроцилиндров 5 .первого и третьего рядов движутся вверх. А порщНи 6 гидроцилиндров 5 второго ряда опускаются вниз вместе с корпусами. Площадка 4 остается относительно уровня спокойной воды На месте, т. е. занимает неизменное горизонтальное положение в пространстве. Это достигается благодаря работе автоматической системы управления, положением и контроля стабилизации площадки.
Давление в верхних полостях 17 гидроцилиндров 5 соответствует загрузке площадки. Индуктивные датчики 25 реагируют на повыщение этого давления. Поэтому по мере принятия груза, выдачи или расходования судовых запасов, электронное устройство воздействует На чувствительность индуктивных датчиков 25 или же степень их чувствительности задают вручную с поста управления.
В первый момент (фиг. 9) давление в верхних поршневых полостях 17 гидроцилиндров 5 первой и третьей групп повышается, благодаря стремящимся вверх порщням 6. Причем повышение давления в полостях 17 этих гидроцилиндров зависит и от понижения давления в верхних полостях 17 гидроцилиндров 5 второго ряда, где порщни 6 движутся вниз вслед за корпусами своей группы. Это зависит также от ускорения и инерции масс, связанных с поршнем, конструкции и др. Индуктивные датчики 25, отметив повышение давления выше заданного, двигают сердечники индуктивных катушек. В катушке при этом появляется ток, пропорциональный скорости возрастания давления (фиг. 2 и 4). Эти сигналы поступают на дифференцируюш.ие элементы 31, где они налагаются на сигналы, поступаюшие от корректируюшей системы (если таковые поступят). Затем отдифференцированные сигналы усиливаются до нужных параметров в усилителях 32, и уже нужный ток поступает на исполнительные механизмы (например, соленоиды) 34, которые приоткрывают клапан 21 управления на величину, зависяшую от параметров тока управления, т. е. пропорционально избытку давления в верхних полостях 17 гидроцилиндров 5. Таким образом, поршни 6 со штоками 7 и стойками 9 движутся вверх относительно надводной площадки 4 так, чтобы не сместить площадку по вертикали (фиг. 9 и 10). В это время давление в нижних штоковых полостях 18 гидроцилиндров 5 второго ряда, чьи корпуса движутся вниз, увлекая за собой поршни 6, повышается, и на это реагируют контактные датчики 26. Они замыкают контакты, благодаря чему на усилители 33 поступает ток. Усилившись там до нужных параметров ток поступает на исполнительные механизмы (например, соленоиды) 35 и 34 клапанов 20 и 21 управления, исполнительные механизмы 35 и 34 мгновенно эти клапаны открывают. Жидкость под действием движушихся вниз поршней 6 свободно перетекает из нижних полостей 18 гидроцилиндров 5 в верхние их полости 17. Корпуса 2 вместе со стойками 9, штоком 7 и поршнем 6 опускаются во впадину между волн. При движении платформы в шторм надо принять во внимание то обстоятельство, что при восхождении на волну скорость корпусов снижается. В то же время скорость корпусов, сходящих с волн возрастает относительно площадки 4. Это приводит к возникновению изгибающих моментов на несущих системах. В этом случае должна действовать система автоматического регулирования оборотов главных двигателей. При восхождении корпусов на волну обороты их двигателей должны быть увеличены для пред отвращения отставания корпусов. При схождении корпусов с волны обороты их двигателей должны быть сброшены для предотвра щения опережения. Во второй момент (фиг. 11 и 12) первый и третий ряды корпусов находятся на гребнях волн, а второй - во впадине между волн. Все поршни 6 при этом прекращают свое движение. Повышение давления в верхних полостях 17 гидроцилиндроБ 5 первого и второго рядов иВ нижних полостях 18 гидроцилиндров 5 второго ряда прекращается. Датчики .25 и 26 устанавливаются на место и клапаны 20 и 21 управления закрываются. 9 4 Наступает третий момент (фиг. 13 и 14). В этот .момент поршни 6 первого и третьего рядрв опускаются вместе с соответствующими им корпусами. Их клапаны 20 и 21 управления полностью открыты. Поршни 6 второго ряда поднимаются под действием соответствующих им корпусов. Клапаны 21 управления гидроцилиндров этого ряда приоткрыты. Автоматическая система управления положением и контроля стабилизации надводной площадки работает так же, как и в первый момент. Когда корпуса второго ряда окажутся на гребне волны, а соответственно корпуса первого и третьего рядов - во впадине между волн, наступает четвертый момент. Происходит то же самое, что и во второй момент (фиг. 15 и 16). Вслед за четвертым моментом наступает первый момент. Автоматическая система управления положение.м и контроля стабилизации надводной площадки включает в себя две системы: систему обеспечения стабилизации надводной площадки и систему контроля стабилизации надводной площадки (или следящую систему). Задача системы контроля стабилизации надводной площадки J(cлeдящей системы) - контролировать .заданное положение площадки в пространстве и в необходимых случаях корректировать его. Для этого к датчикам 27 уровня в контактах 49 подведено напряжение. Выходное напряжение на контактах 50 при этом будет зависеть от сопротивления стальной .ленты, пропорционального ее длине, зависящей от движения стоек 9. Подаваемое на контакты 49 напряжение строго постоянно. Из сказанного следует, что напряжение на контактах 50 находится в пря.мой зависимости от положения площадки 4 в пространстве (фиг. 2 и 5). Поэтому через задатчик 30 (фиг. 4) подают на блок 28 сравнения задание на нужное положение надводной площадки 4 в пространстве. От датчиков 27 уровня сигналы в виде определенного напряжения постоянно поступают на блок 28 сравнения, но он срабатывает только тогда, когда от всех датчиков 27 поступает одинаковое напряжение. Это происходит в первый или в третий момент, т. е. тогда, когда центры всех шарнирных связей 8 окажутся на одном уровне. В этом случае блок -28 сравнения сравнивает поступившее напряжение от датчиков 27 уровня с заданным и, если будет расхождение, посылает соответствующий импульс на блок 29 управления. Например, надводная пл.ощадка 4 опустилась ниже заданного положения. Блок 29 управления, получив команду от сравнивающего устройства, подает импульс определенной величины на дифференцирующие элементы 31 тех рядов, чьи корпуса восходят на волну, например на первый и третий ряды (фиг. 9). В дифференцирующих элементах 31импульс, поступивший от блока 29 управления, накладывается на сигнал, поступивший от датчика 25. И уже на усилители 32выходит ослабленный сигнал. Благодаря этому исполнительные механизмы 34 на время, определенное блоком 29 управления, прикроют клапаны 21 управления. Жидкость из верхних полостей 17 гидроцилиндров 5 на строго определенное время замедляет или прекращает перетекание в нижние полости 18, и надводная площадка 4 приподнимается до нужного положения. Если блок 28 сравнения отметит, что площадка 4 находится выще заданного уровня, оно подает соответствующий сигнал на блок 29 управления, который подает усиливающий импульс на дифференцирующие элементы 31, например первого и третьего рядов. В этом случае усиливающий импульс на строго определенное время усиливает сигнал, идущий от датчиков 25. Соответственно исполнительные механизмы 34 на то же самое время больше открывают клапаны 21 управления. Жидкость из верхних полостей 17 гидроцилиндров 5 за это время быстрее перетекает в нижние полости 18, и площадка 4 быстрее, опускается до заданного уровня. Когда судно идет лагом к волне, возникают те же самые четыре момента (фиг. 17- 20). Разница только в том, что во второй и четвертый моменты (фиг. 17 и 19) осадка корпусов, находящихся на гребнях волн, по миделю меньше, а осадка по миделю корпусов, находящихся во впадине волн, больще. Это влечет за собой увеличение хода поршней 6. В штормовую погоду вступают в работу ветровые агрегаты (фиг. 5, 6, 1), снабжая платформу дополнительно электроэнергией. Ветер, воздействуя на лопасти 57, вращает ветровой двигатель 53, который вращаясь, передает крутящий момент через муфту 60 электрогенератору 54. К силовым установкам 70 в корпусах (фиг. 5, 7 и 8) питание подается по кабелям 52, продолженным в стойках 9. Компенсирующее устройство 51 предотвращает слабину и рывки кабелей 52 при движении стоек 9. Предлагаемая морская стабилизированная платформа обладает уменьшенной амплитудой колебаний на волнении. Конструкция этой платформы не основана на сопротивлении энергии волн для успокоения качки, что дает возможность получить более высокую степень стабилизации и без дополнительных затрат энергии. Это, в свою очередь, ведет к экономии топливоресурсов. В то же время высокая степень стабилизации дает возможность повь1сить мощность рыбофабрик, которыми оборудованы плавбазы рыболовного флота. Кроме того, отсутствие качки надводной площадки приводит к повышению производительности труда и условий проживания на ней экипажа. А также повышает надежность и сроки работы механизмов. Высокая стабилизация особенно важна для научно-исследовательских судов, когда качка отражается на исследовательской работе и ее результатах. Формула изобретения 1. Морская стабилизированная платформа, содержащая группу водоизмещающих корпусов, щарнирно связанных с вертикально расположенными опорными стойками, соединенными с надводной грузовой площадкой, отличающаяся тем, что, с целью улучшения эксплуатационных качеств, путем, уменьщения амплитуды колебания ее на волнении и повышения остойчивости, она снабжена узлом стабилизации вертикального перемещения надводной грузовой площадки с автоматической системой управления положением ее и контроля стабилизации, содержащим гидроцилиндры с поршнями и щтоками, насосы и сообщенные гидравлически с последними компенсационные емкости, при этом поршневая и штоковая полости каждого гидроцилиндра заполнены рабочей жидкостью, и соединены между собой перепускными трубопроводами с установленными на них клапанами, а компенсационная емкость и напорный патрубок насоса связаны гидравлическими магистралями через запорные клапаны со штоковой и соответственно поршневой полостями каждого гидроцилиндра, причем упомянутые опорные стойки установлены с возможностью вертикального перемещения относительно надводной грузовой площадки в выполненных в последней вырезах, корпусы гидроцилиндров жестко прикреплены к надводной грузовой площадке и расположены внутри упомянутых стоек, а штоки гидроцилиндров щарнирно соединены своими Нижними концами посредством горизонтальных осей с нижними концами упомянутых стоек, при этом горизонтальные оси шарнирных связей стоек с водоизмещающими корпусами и концов штоков с концами стоек расположены на мидель-шпангоутах водоизмещающих корпусов и перпендикулярны диаметральным плоскостям последних, а водоизмещающие корпуса расположены друг за другом кильватерными рядами в группу колонн. Платформа по п. 1, отличающаяся тем, что автоматическая система управления положением и контроля стабилизации надводной грузовой площадки содержит индуктивные и контактные датчики давления рабочей жидкости в полостях гидроцилиндров, датчики уровня положения надводной грузовой площадки, установленные на одной из стоек каждого водоизмещающего корпуса, блок сравнения, блок управления, задатчик уровня положения надводной грузовой площадки, дифференцирующий элемент, усилители, исполнительные механизмы, например, соленоиды и контрольный прибор, при этом датчики и задатчик уровней положения надводной грузовой площадки соединены электрическими цепями с блоком сравнения, а выход последнего подключен к блоку управления, который соединен электрическими цепями через дифференцирующий элемент и усилитель с одним исполнительным механизмом,, связанным кинематически с одним упомянутым клапаном на перепускном трубопроводе, при этом один из датчиков давления рабочей жидкости в полости тидроцилиндра подключен к дифференцирующему элементу, а другой, датчик давления подключен через усилитель к упомянутым исполнительным механизмам, связанным кинематически с другими упомянутыми клапанами и с первым клапаном.
Источники информации, принятые во внимание при экспертизе 1. Патент США № 3323478, кл. 114-05, опублик. 06.06.67 (прототип).
)(
X
X
Фиг.4
О S4 60 6
/
S-/ S2
I /
г
г
У
-5
/
r-iOFE
t
-fi
//
Big
Г
/
b.
Ч/
J4
.
cm
v
-5
-5
17
ЗЩ
V
ь.
JS..
г
Г1
