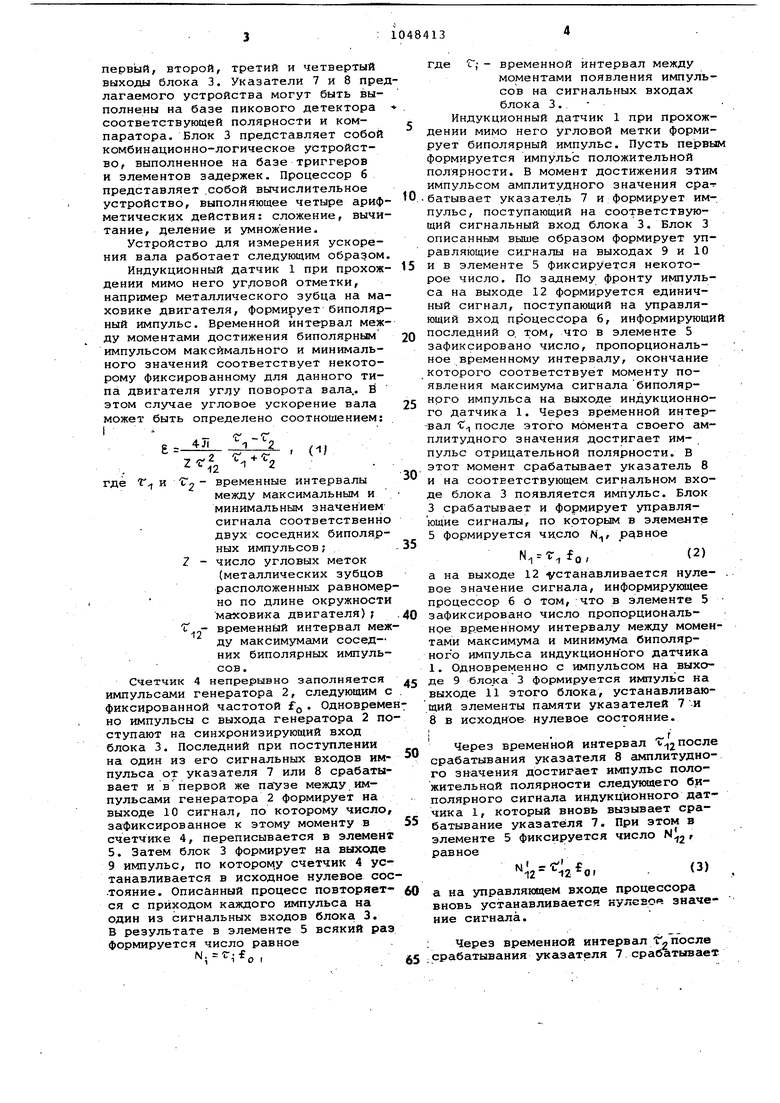
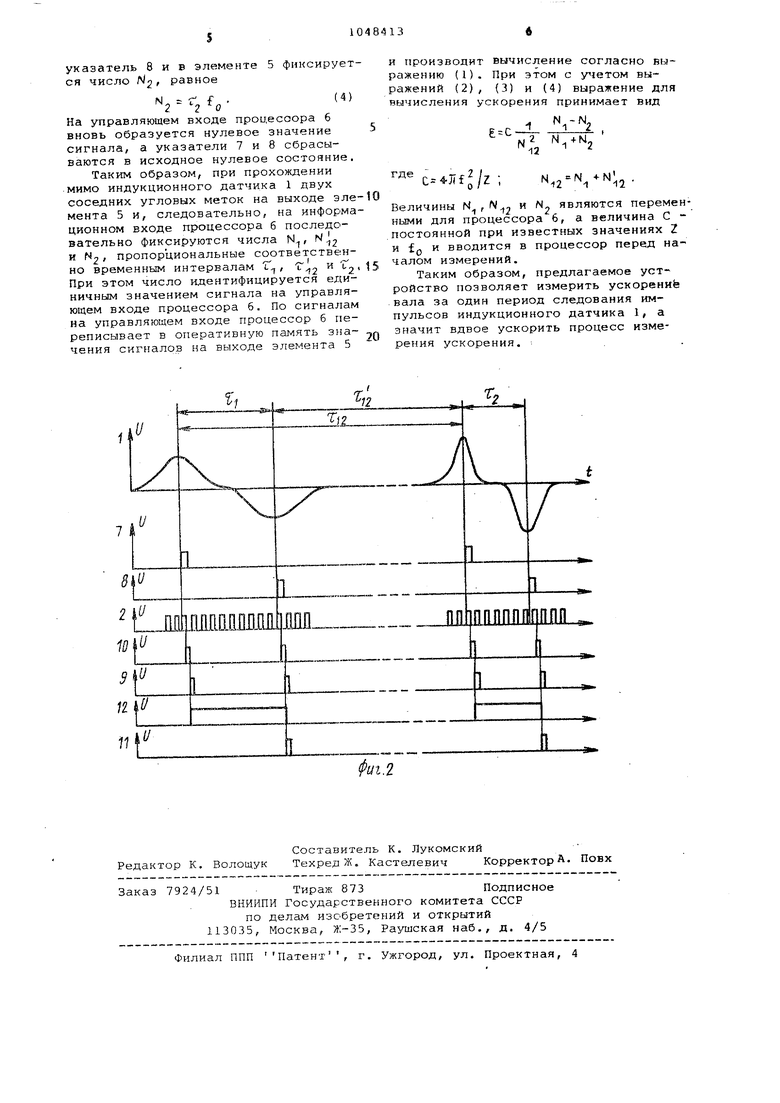
Изобретение относится к измерению парс1Метров вращательного движения, в частности к измерителям углового ускорения вала с индукционным импульсным датчиком положения вала, например двигателей внутреннего сгорания Известны устройства для измерения ускорения 1 J. Однако они имеют относительно низкое быстродействие, вызванное тем что точность измерения ускорения прямо пропорциональна числу импульсов, зафиксированных в реверсивном счетчике к концу второго временного интервала. Для увеличения числа импульсов увеличивают временные интервалы, а следовательно, и углы поворота вала, соответствующие этим временным интервалам, однако точность измерения при этом падает. Наиболее близким к предлагаемому по технической сущности и достигаемым результатам является устройство для измерения ускорения вала, содержащее индукционный датчик импульсов генератор тактовых импульсов, блок команд, счетчик импульсов, элемент памяти, решающий блок, выполненный в виде процессора, причем выход генератора тактовых импульсов подключен к счетному входу .счетчика импуль сов и к синхронизирующему входу е)лока команд, первый выход которого под ключен к установочному входу счетчика импульсов, а второй выход - к входу записи элемента памяти, включенному между кодовым выходом счетчика импульсов и информационным входом процессора. В известном устройстве счетчик им пульсов совместно с элементом naiviHти и блоком команд образует измеритель временных интервалов. Блок команд выполнен .в виде распределителя сигналов на базе триггеров с синхронизирующими входами. Счетчик импульсов заполняется импульсами генератора тактовых импульсов. В момент появления импульса индукционного датчика блок команд формирует управляющие сигналы, по которым состояние счетчика переписывается в элемент памяти, а счетчик устанавливается в исходное нулевое состояние. Число формируемое в элементе памяти, пропорционально временному интервалу между соседними импульсами индукционного датчика. Принцип действия устройства основывается на том, что при известном угле поворота межл.у соседними импульсами индукционного датчика угловая скорость может быть определена как величина обратно пропорциональная периоду следования импульсов этого датчика. По результата измерения двух смежных периодов процессор вычисляет величины обратно пропорциональные этим периодам и соответственно значение ускорения за интервал времени равный среднему значению измеренных периодов СЗ. Недостатком известного устройства также является сравнительно низкое быстродействие, поскольку измерение ускорения может быть осуществлено не менее чем за два периода следования импульсов индукционного датчика. Цель изобретения - повышение быстродействия устройства. Поставленная цель достигается тем, что в устройство, содержащее индукционный датчик импульсов, генератор тактовых импульсов, блок команд, счетчик импульсов, элемент памяти, процессор, выход генератора тактовых импульсов которого подключен к счетному входу счетчика импульсов и к синхронизирующему входу блока команд, первый выход которого подключен к установочному входу счетчика . импульсов, а второй выход - к входу записи элемента памяти, включенному между кодовым выходом счетчика импульсов и информационным входом процессора, дополнительно введены указатель момента появления максимума и указатель момента появления мииимума сигнала,а блок команд снабжен ТРЕТЬИМ и четвертым выходами,причем выход индукционного датчика импульсов подключен к сигнальным входам введенных указателей, выход которых подключен к сигнальным входам блока команд, а установочные входы указателей - к третьему выходу блока команд, четвертый выход которого подключен к управляющему входу процессора. На фиг. 1 представлена структурная схема устройства; на фиг. 2 временная диаграмма его работы. Устройство содержит индукционный датчик 1 импульсов, генератор 2 так--товых импульсов, блок 3 команд с четырьмя выходами, счетчик 4 импульсов, элемент 5 памяти, процессор б. Выход генератора 2 подключен к счетному входу счетчика 4 и к синхронизирующему входу блока 3, первый выход которого подключен к установочному входу счетчика 4, а второй выход к входу записи элемента5, включенному между кодовым выходом счетчика 4 и индукционным входом процессора 6. Кроме этого, устройство содержит указатель 7 момента появления максимума и указатель 8 момента появления минимума сигнала. Выход индукционного датчика 1 подключен к сигнальным входам указателей 7 и 8, выходы которых подключены к сигнальным входам блока 3, установочные входы - к третьему выходу блока 3, а четвертый выход этого блока подключен к управляющему входу процессора 6. Индекса1ми 9-12 обозначены соответственно первый, второй, третий и четвертый выходы блока 3. Указатели 7 и 8 пред лагаемого устройства могут быть выполнены на базе пикового детектора соответствующей полярности и компаратора. Блок 3 представляет собой комбинационно-логическое устройство, выполненное на базе триггеров и элементов задержек. Процессор б представляет .собой вычислительное устройство, выполняющее четыре ариф метических действия: сложение, вычитание, деление и умножение. Устройство для измерения ускорения вала работает следующим образом Индукционный датчик 1 при прохождении мимо него угловой отметки, например металлического зубца на маховике двигателя, формирует биполярный импульс. Временной интервал между моментами достижения биполярным импульсом максимального и минимального значений соответствует некоторому фиксированному для данного типа двигателя yrijy поворота вала.. В этом случае угловое ускорение вала может быть определено соотношением: I « Vi l.-ЛЛ где Т и временные интервалы между максимальным и минимальным значением сигнала соответственно двух соседних биполярных импульсов; число угловых меток (металлических зубцов расположенных равномер но по длине окружности маховика двигателя); Т - временный интервал меж ду максимумами соседних биполярных импульсов. Счетчик 4 непрерывно заполняется импульсами генератора 2, следующим с фиксированной частотой f. Одновреме но импульсы с выхода генератора 2 по ступают на синхронизирующий вход блока 3. Последний при поступлении на один из его сигнальных входов импульса от указателя 7 или 8 срабатывает и впервой же паузе между импульсами генератора 2 формирует на выходе 10 сигнал, по которому число, зафиксированное к этому моменту в счетчике 4, переписывается в элемент 5. Затем блок 3 формирует на выходе 9 импульс, по которому счетчик 4 устанавливается в исходное нулевое сос тояние . Описанный процесс повторяется с приходом каждого импульса на один из сигнальных входов блока 3. В результате в элементе 5 всякий раз формируется число равное где с;- временной интервал между моментами появления импульсов на сигнальных входах блока 3. Индукционный датчик 1 при прохождении мимо него угловой метки формирует биполярный импульс. Пусть формируется импульс положительной полярности. В момент достижения этим импульсом амплитудного значения срабатывает указатель 7 и формирует импульс, поступающий на соответствующий сигнальный вход блока 3. Блок 3 описанным выше образом формирует управляющие си.гналы на выходах 9 и 10 и в элементе 5 фиксируется некоторое число. По заднему фронту импульса на выходе 12 формируется единичный сигнал, поступающий на управляющий вход процессора 6, информирующий последний о. том, что в элементе 5 зафиксировано число, пропорциональное временному интервалу, окончание которого соответствует моменту появления максимума сигнала биполярнрго импульса на выходе индукционного датчика 1. Через временной интер-вал t после этого момента своего амплитудного значения достигает импульс отрицательной полярности. В этот момент срабатывает указатель 8 и на соответствующем сигнальном входе блока 3 появляется импульс. Блок 3 срабатывает и формирует управляющие сигналы, по которым в элеме«те 5 формируется чи,сло N, равное N,r,f а на выходе 12 устанавливается нулевое значение сигнала, информирующее процессор 6 о том, что в элементе 5 зафиксировано число пропорциональное временному интервалу между моментами максимума и минимума биполярного импульса индукционного датчика 1. Одновременно с импульсом на выходе 9 блока 3 формируется импульс на выходе 11 этого блока, устанавливающий элементы памяти указателей 7 .и 8 в исходное нулевое состояние. I г Через временной интервал t jпосле срабатывания указателя 8 амплитудного значения достигает импульс положительной полярности следукидего биполярного сигнала индукционного датчика 1, который вновь вызывает срабатывание указателя 7. При этом в элементе 5 фиксируется число , равное на управляющем входе процессора вновь устанавливается нулевой значение сигнала. Через временной интервал срабатывания указателя 7 срабатывает указатель 8 и в элементе 5 фиксирует ся число Nj, равное На управляющем входе процесоора 6 вновь образуется нулевое значение сигнала, а указатели 7 и 8 сбрасываются в исходное нулевое состояние. Таким образом, при прохождении -мимо индукционного датчика 1 двух соседних угловых меток на выходе эле мента 5 и, следовательно, на информа ционном входе процессора 6 последовательно фиксируются числа N, и N2 пропорциональные соответственно временным интервалам t , Т При этом число идентифицируется единичным значением сигнала на управляющем входе процессора 6. По сигналам на управляющем входе процессор б переписывает в оперативную память значения сигналов на выходе элемента 5 и производит вычисление согласно выражению (1). При этом с учетом выражений (2), (3) и (4) выражение для вычисления ускорения принимает вид c-4.f2/z; N,,-N;2 Величины N, N. являются переменными для процессора 6, а величина С постоянной при известных значениях 2 и f(j и вводится в процессор перед началом измерений. Таким образом, предлагаемое устройство позволяет измерить ускорение вала за один период следования импульсов индукционного датчика 1, а значит вдвое ускорить процесс измерения ускорения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения мощности двигателя | 1982 |
|
SU1030678A1 |
| Отметчик углового положения вала двигателя внутреннего сгорания | 1982 |
|
SU1038824A1 |
| Устройство для измерения мощности цилиндров двигателя внутреннего сгорания | 1990 |
|
SU1789898A1 |
| Устройство для измерения мощности двигателя | 1983 |
|
SU1084631A1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |
| Фазоизбирательное устройство | 1977 |
|
SU741183A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| Устройство для определения угла наклона прямолинейного отрезка контура изображения объекта | 1985 |
|
SU1302305A1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЯ ВАЛА, содержащее индукционный датчик импульсов, генератор тактовых импульсов, блок команд, счетчик импульсов, элемент памяти, процессор, причем выход генератора тактовых импульсов подключен к счетному входу счетчика импульсов и к синхронизирующему входу блока команд, первый выход которого подключен к установочному входу счетчика импульсов, а второй выход - к входу записи элемента памяти, включенному между кодовым выходом счетчика импульсов и информационным входом процессора, отличающееся тем, что, с целью повышения, быстродействия устройства, в него введены указатель момента появления максимума и указатель момента появления минимума сигнала, а блок команд снабжен третьим и четвертым выходами, причем выход индукционного датчика импульсов под-ключей к сигнальным вхоДс1М введенных указателей, выходы которых подключены к сигнальным входам блока команд, а установочные входы указателей к третьему выходу блока команд, чет(Л вертый выход которого подключен к управляющему входу процессора. Ь/ 4 /; ОО J W ч 00 г.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения ускорения транспортных средств | 1976 |
|
SU706783A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4055998, кл | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
