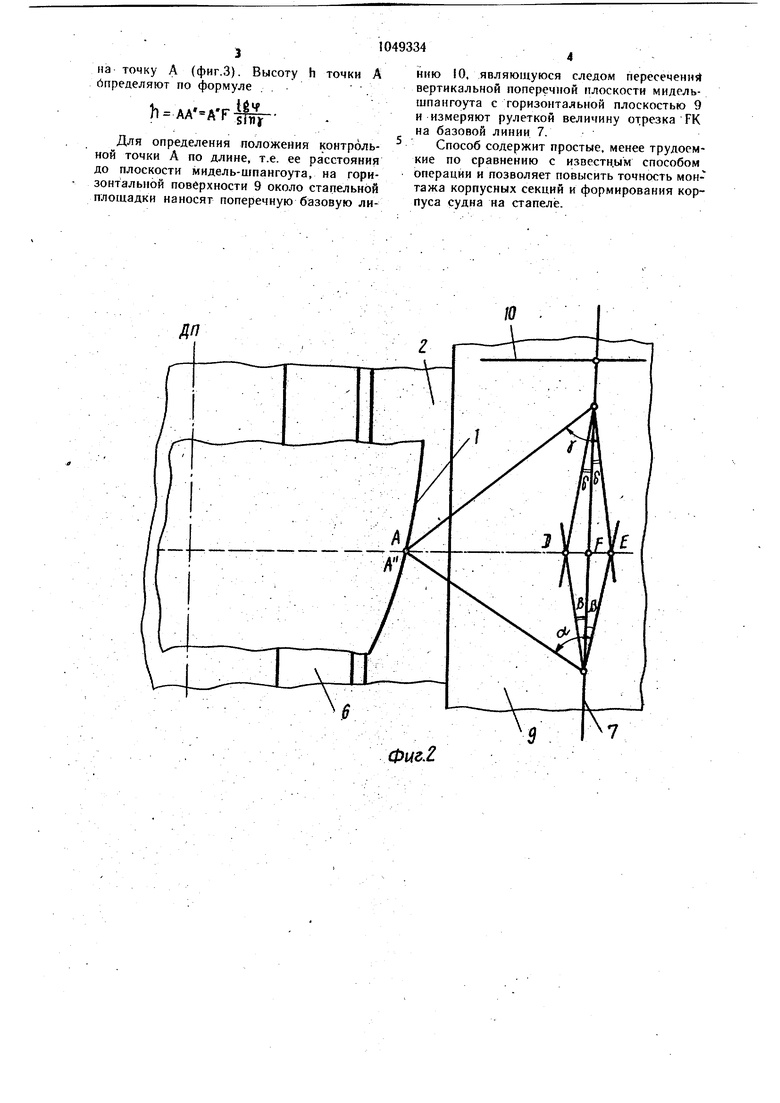
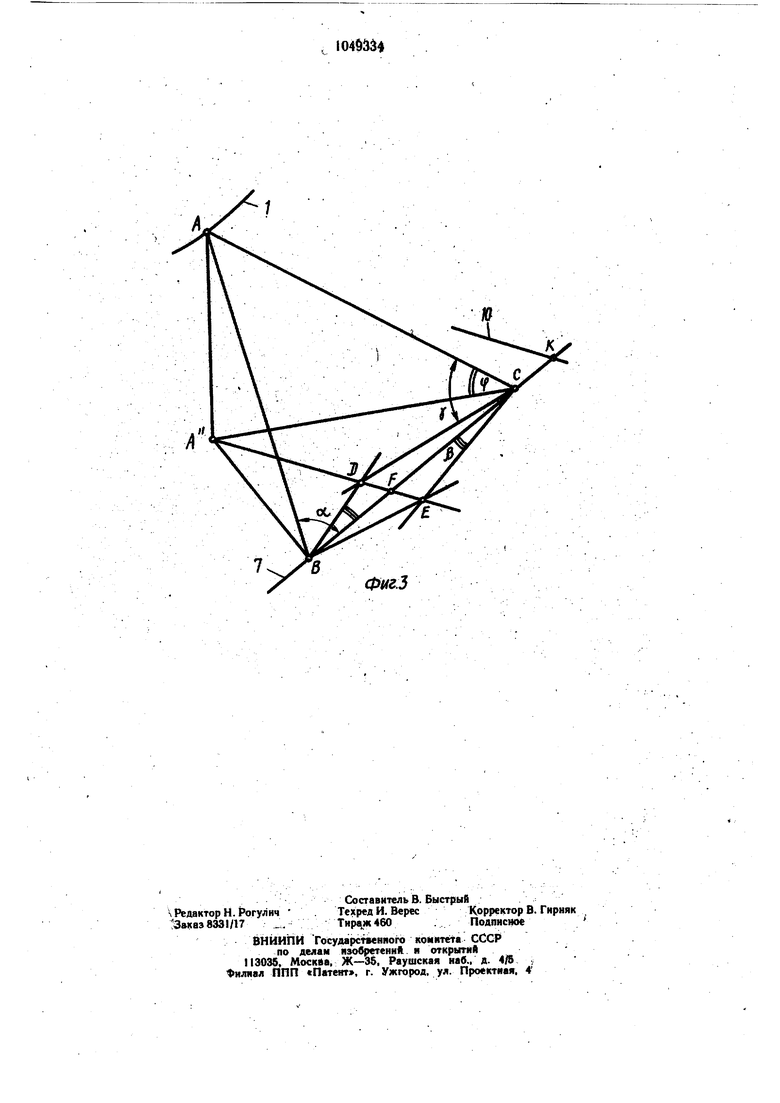
Изобретение относится к технологии судостроения, в частности к способам контроля пространственнрго положения судовых корпусных конструкций. Известен способ косвенного измерения расстояний от контрольной точки на корпусе, судна до базовых плоскостей, по которому строят звено в форме ромба, определяющего длину базиса, и измеряют последнюю 1 . . Недостатком известного способа является значительная трудоемкость измерений. Цель изобретения - сокращение трудоемкости измерений. Указанная цель достигается тем, что согласно способу косвенного измерения расстояний от контрольной точки на корпусе судна до базовых плоскостей, по которомустроят звено в форме ромба, определяющего длину базиса и измеряют последнюю, из первой произвольной точки на базовой линии по одну сторону от контрольной точки измеряют теодолитам горизонтальный угол между базовой линией и направлением на конт рольную точку, при этом базовой линией является след пересечения.вертикальной базовой плоскости с горизонтальной базовой плоско.стью, затем из первой произвольной точки по обе стороны от базовой линии в горизонтальной плоскости проецируют равные углы, тангенс которых соответствует разделе.нному на модуль измерения значению тангенса измеренного горизонтального угла, аналогичное построение выполняют из второй произвольной точки на базовой линии по другую сторону от контрольной точки, при этом отмечают точки пересечения сторон построенных углов, расстояние между которыми составляет длину базиса, и определяют расстояние от контрольной точки до вертикальной базовой плоскости, умножая длину базиса на половину значения модуля измерения, выбранного равным целому числу. Кроме того, на второй произвольной точке на базовой линии измеряют теодолитом вертикальный угол между горизонтальной плоскостью и направлением на контрольную точку и определяют расстояние от контрольной точки до горизонтальной базовой плоскости, умножая величину расстояния от контрольной точки до вертикальной базовой плоскости на величину .отношения тангенса измеренного вертикального угла и синусу упомянутого горизонтального угла. На фиг. I схематически показана кормовая оконечность судна, строящегося на ста.пеле, поперечн.ое сечение; tia фиг. 2 - схема линейных и угловых построений на горизонтальной плоскости; на фиг. 3 - аксонометрическое изображение схемы линейных и угловых построений. Способ косвенного измерения расстояний от контрольной точки на корпусе судна до базовых плocкocteй описан на примере про верки полуп1Ироты, высоты и положения по длине- некоторой контрольной точки на наружной обшивке борта судна, строящегося на стапеле. Измерение расстояния от точки до продольной вертикальной базовой плоскости осуществляется следующим образом. Поскольку определение полушироты контрольной точки А на наружной общивке 1 корпуса судна путем непосредственного, измерения расстояния между ее проекцией А на стапельную плиту 2 и диаметральной плоскостью (ДП) судна (или 6aTOKcoivT в пределах стапельной плить;) осуществить невозможно из-за спусковых дорожек 3, загромождения стапеля лесами 4, кильблоками5:, опорами б и другими. Для измерения полушироты точки А используют продольную базовую линию 7, нанесенную за пределами стапеля и представляющую собой след пересечения вертикальной базовой плоскости 8 батокса с горизонтальной поверхностью- 9 околостапельной площадки. Над произвольной точкой В на базовой линии 7 батокса устанавливают теодолит и измё.ряют горизонтальный угол А между базовой линией 7 батокса и направлением на контрольную точку А, находят тангенс угла и делят его величину на некоторое целое число, являющееся модулем m измерения, например m 10. По обе стороны базовой линии 7 из точки В проектируют.теодолитом угол о л vf -Ъ тгГ (В рассматриваемом примере fi ). Аналогичным образом выполняют постро ение, устанавливая теодолит на базовой линии 7 батокса над точкой С, произвольно расположенной В нос от контрольной точки А, т.е. в общем случае Измеряют горизонтальный угол 7 LACF делят iglf на ш 10 и проецируют из точки С по обе стороны базовой линии 7 угол д cJ arcW 3rc-Mt,получая н пересечении с линиями проецирования из точки В углов концевые точки D и Е базиса DE, после чего измеряют рулеткой его длину. Расстояние АК (фиг. I) от контрольной точки А до- вертикальной базовой плоскости 8 определяют, умножая длину базиса DE на полумодуль, т.е. Для измерения расстояния контрольной точки А до горизонтальной базовой (основной) плоскости (т.е. высоты точки А) при установке теодолита над точкой С измеряют вертикальный уголЛ LACA между горизонтальной плоскостью и направлением
на точку А (фиг.З). Высоту h точки А йпределяют по формуле . .
определения положения контрольной точки А по длине, т.е. ее расстояния до плоскости мидель-шпангоута, на горизонтальной поверхности 9 около стапельной площадки наносят поперечную базовую линию 10, являюшуюся следом пересечений вертикальной поперечной плоскости мидельшпангоута с горизонтальной плоскостью 9 и измеряют рулеткой величину отрезка FK на базовой линии 7.
Способ содержит простые, менее трудоемкие по сравнению с известным способом операции и позволяет повысить точность монтажа корпусных секций и формирования корпуса судна на стапеле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптический способ проверки положенияКОРпуСНыХ КОНСТРуКций и ОбВОдОВ СудНАНА СТАпЕлЕ | 1979 |
|
SU844460A1 |
| Способ проверки положения по высоте элементов конструкции и обводов корпуса судна | 1980 |
|
SU965875A1 |
| Способ проверки формы корпусной конструкции по ее диагонали | 1983 |
|
SU1152866A1 |
| Способ разметки деталей приварного насыщения на поверхности в помещении судна | 1990 |
|
SU1795282A1 |
| Способ установки блоков корпуса судна на стапеле | 1982 |
|
SU1043066A1 |
| Способ установки блока корпусаСудНА HA СТАпЕлЕ (ЕгО ВАРиАНТы) | 1979 |
|
SU800015A1 |
| Способ разметки теоретических линий набора и контурных линий секций корпуса судна | 1983 |
|
SU1123929A1 |
| Способ проверки положения конструкций корпуса судна | 1982 |
|
SU1137297A1 |
| Способ установки секции при изготовлении корпуса судна и устройство для его осуществления | 1984 |
|
SU1248886A1 |
| Способ определения размеров крупногабаритного объекта | 1986 |
|
SU1384939A1 |
1. СПОСОБ КОСВЕННОГО ИЗМЕРЕНИЯ РАССТОЯНИЙ ОТКОНТРОЛШ НОЙ ТОЧКИ НА КОРПУСЕ СУДНА ДОБАЗОВЫХ ПЛОСКОСТЕЙ, по KOTOpioMys-: строят звеир в форме ромба, определяющей длину базиса, и измepяiot последнюю, ofyi чающийся тей, что, с целью сокрашенйя трудоемкости измерений, из первой произвольной точки на базовой линии по одну сторону от контрольной точки измеряют теодолитом горизонтальный угол между 6af зовой линией и направлением нд KOHtpoJtb-: ; ную точку, при ЭТОМ базовой линией является след пересечения вертикальной базрл вой плоскости с горизонтальной базовой плоскостью, затем из первой произвольной точки по обе стороны от базовой Линии в горизонтальной плоскости проецн руют . Hbie углы, тангенс которых соответствует разделенному на модуль измерения значеиию тангенса измеренного горизонтального угла,аналогичное построение выполняют из второй произвольной точйи на базовой линии по другую сторону от контрольной точки, при этом отмечают точки пересечения сторон построенных углов, расстояние между которымн составляет длнну базиса и. оп-, ределяют расстояние от контрольной точки до вертикальной базовой плоскости, умиожая длину базиса на половину значения модуля измерения, «выбранного равным целому числу. 2. Способ по п. 1, отличающийся тем, что на второй пронзвольной точке на базовой линии измеряют теодолитом вертикальС ный угол между горизонтальной плоскостью «е и HanpaBJiieHHeM н.а контрольную точку и определяют расстояние от контрольной точки до горизонтальной базовой плоскости, умножая величину расстояния от контрольной точки до вертикальной базовой плоско сти на величину .отношения тангенса изме; ренного вертикального угла к синусу упомя1ч.нутого горизонтального угла. 4 ;о со со 4
Ф14г2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Баканова В | |||
| В | |||
| Геодезия | |||
| М,, «Нед-; ра, 1980 | |||
| с | |||
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
