2. Устройство для осуществления способа по п. 1, содержащее лазерный излучатель, установленный на регулировочном приспособлении, оптическую головку и приемники, установленные в контрольных точках секции и оптически связанные с лазерным излучателем, отличающееся тем, что, оно снабжено измерителем угла поворота, установленным на оптической головке, выполненной в виде жестко закрепленной на регулировочном приспособлении стойки с подшипниковым узлом, в который с возможностью поворота вокруг оси светового пучка лазерного излучателя установлен корпус с упором для взаимодействия с измерителем угла поворота, во внутренней полости которого установлены пентапризма и система оптических элементов для направления светового пучка на центр пентапризмы по нормали к поверхности ее входной грани, при этом пентапризма установлена с возможностью поворота вокруг оптической оси ее входной грани для
1
Изобретение относится к судостроению и может быть использовано для точной ориентации секций корпуса судна в процессе его стапельной постройки.
Цель изобретения - расширение функциональных возможностей.
На фиг. 1 - схема выполнения способа установки секции при изготовлении корпуса судна; на фиг. 2 - вертикальный разрез оптической головки устройства; на фиг. 3 - вид А на фиг. 2.
Способ установки секции 1 (фиг. 1) при изготовлении корпуса (не показан) судна включает задание световым пучком 2 базовой основной линии 3, пространственную ориентацию секции 1 манипулятором (не показан) до совмещения светового пучка 2 с приемниками 4 и 5, например позиционно- чувствительнымн датчиками ПЧД, расположенными в контрольных точках основной линии 3, последовательное направление светового пучка 2 на приемники 6 и 7, тоже типа ПЧД, установленные симметрично диаметральной плоскости 8 в контрольных точках линии 9, нанесенной на флоре крайнего щпангоута 10 параллельно основной плоскости 11, и измерение углов а и а2 между проекциями 12 и 13 светового пучка 2 на флор крайнего щпангоута 10 и вертикальной базовой плоскостью V, проходящей через основную линию 3, поворот светового пучка 2 относительно основной линии 3 от приемника 7 на угол, равный ° - - - -, и поворот
расположения центра пентапризмы на оси вращения корпуса, причем оптическая ось входной грани перпендикулярна этой оси, а ось подшипникового узла ориентирована по оптической оси лазерного излучателя.
3.Устройство по п. 2, отличающееся тем, что система оптических элементов для направления светового пучка выполнена в виде трех прямоугольных отражательных призм, последовательно установленных неподвижно относительно корпуса и оптически связанных друг с другом.
4.Устройство по п. 2, отличающееся тем, что измеритель угла поворота содержит установленное на подшипниковом узле с возможностью поворота вокруг его оси кольцо с фиксатором, взаимодействующим с наружной поверхностью подшипникового угла, и с жестко закрепленной на кольце вилкой, на которой установлены соосно два регулировочных винта и индикатор линейных перемещений, взаимодействующие с упором.
секции 1 до совмещения светового пучка 2 с приемником 7.
Устройство для осуществления способа содержит лазерный излучатель 14 (фиг. 1), установленный на регулировочном приспособлении 15 соосно с оптической головкой 16 и вырабатывающий световой пучок 2. При- е.мники 4-7, например, типа ПЧД, оптически связаны с оптической головкой 16 и электрически - с блоком индикации 17,
0 индицирующим сигналы рассогласования приемников 4-7, например, типа позицион- но-чувствительных датчиков, вырабатываемые ими при несовпадении оси светового пучка 2 с центрами этих приемников. Оптическая головка 16 состоит из стойки 18
(фиг. 2), сканатора 19 и измерителя 20 угла поворота сканатора 19 относительно оси светового пучка 2. Стойка 18, в центральном отверстии а которой размешен подшипниковый узел 21, установлена на регулировочном
Q приспособлении 15 соосно световому пучку 2 лазерного излучателя 14. В подшипниковом узле 21 установлен хвостовик в корпуса 22 сканатора 19, который снабжен упором 23, предназначенным для передачи вращения от корпуса 22 к измерителю 20. Внутри кор5 пуса 22 расположена пентапризма 24, жестко закрепленная в рамке 25, имеющей возможность поворота относительно корпуса 22, осуществляемого вручную вращением маховика 26, установленного на хвостовике (поз. не обозначен) рамки 25. Рамка 25 зафикси0 рована относительно корпуса 22 фиксатором 27 в положении, при котором оптическая ось выходной грани с пентапризмы 24 соосна световому пучку 2, и стопором 28 в любом другом положении. Пентапризма 24 установлена на рамке 25 таким образом, что ее центр расположен на оси вращения оптической головки 16, а оптическая ось входной грани а перпендикулярна этой оси и соосна с осью вращения рамки 25. Внутри корпуса 22 также расположена система оптических элементов е, поворачивающая световой пучок 2 по нормали к поверхности входной грани а пентапризмы 24 и состоящая, например, из трех прямоугольных отражательных призм типа АР-90, установленных неподвижно относительно корпуса 22. Первая призма установлена на оси светового пучка 2 лазер- 5 ного излучателя 14, вторая - на оси светового пучка, отраженного первой призмой, а третья - в точке пересечения оси вращения пентапризмы 24 с осью светового пучка, отраженного второй призмой.
Измеритель 20 состоит, например, из неподвижного кольца 29, жестко закрепленного на подшипниковом узле 21, образующего наружную поверхность подшипникового узла 21 и имеющего ряд радиальных отнии фиксатором 31, взаимодействующим с соответствующим отверстием /. В таком положении световой пучок 2, выходящий из оптической головки 16, горизонтален, расположен в вертикальной базовой плоскости V и пап;)авлен в сторону приемников 4 и 5. По пока: .аниям блока индикации 17 определяют величину смещений приемников 4 и 5 от оси светового пучка 2 и при помощи манипулятора (не показан) позиционируют
10 секцию 1 таким образом, чтобы сигналы рассогласования, вырабатываемые этими приемниками, были равны нулю, обеспечивая тем самым установку секции 1 в стапельное положение по высоте, полущироте и дифференту.
Направляют световой пучок 2 на приемник 6, поворачивая для этой цели скана- тор 19 (фиг. 2) и подвижное кольцо 30 вокруг светового пучка 2 до одного из фиксированных положений, в котором плоскость
од сканирования (плоскость, описываемая световым пучком 2, выходящим из пентапризмы 24 при вращении рамки 25) наиболее близка к приемнику 6. Подвижное кольцо 30 и сканатор 19 фиксируют в этом положении фиксаторо.м 31, взаимодействующим с соотверстий /, равноотстоящих друг от друга 25 ветствующим отверстием / неподвижного
кольца 29. Затем вращением маховика 26 поворачивают рамку 25 с установленной на ней пентапризмой 24 до положения, в котором световой пучок 2 наиболее близок к приемнику 6. Регистрируют первоначальные показания индикатора линейных перемещений светового пучка 35 и регулировочными винтами 34 арретира 32 перемещают упор 23 корпуса 22, т. е. поворачивают сканатор 19, до совпадения светового пучка 2 с центро.м приемника 6, корректируя при этом также и положение светового пучка 2 в плоскости сканирования посредством вращения рамки 25 и пентапризмы 24. При получении сигнала рассогласования, вырабатываемого приемником 6, равным нулю, рамку 25 фики симметричных относительно вертикальной базовой плоскости К (фиг. 1), подвижного кольца 30 (фиг. 2), на котором установлены фиксатор 31, взаимодействующий с отверстиями , арретир 32 (фиг. 3), взаимодействующий с упором 23. Арретир 32 состоит из вилки 33, жестко закрепленной на подвижном кольце 30 и снабженной двумя сооспыми регулировочными винтами 34, и индикатора линейных перемещений 35, взаимодействующего с упором 23 корпуса 22.
Регулировочное приспособление15
(фиг. 1) установлено на высоте основной линии 3 секции 1 и ориентировано таким образом, что световой пучок 2 лазерного излучателя 14 горизонтален (в случае гори30
кольца 29. Затем вращением маховика 26 поворачивают рамку 25 с установленной на ней пентапризмой 24 до положения, в котором световой пучок 2 наиболее близок к приемнику 6. Регистрируют первоначальные показания индикатора линейных перемещений светового пучка 35 и регулировочными винтами 34 арретира 32 перемещают упор 23 корпуса 22, т. е. поворачивают сканатор 19, до совпадения светового пучка 2 с центро.м приемника 6, корректируя при этом также и положение светового пучка 2 в плоскости сканирования посредством вращения рамки 25 и пентапризмы 24. При получении сигнала рассогласования, вырабатываемого приемником 6, равным нулю, рамку 25 фикзонтального стапеля) или наклонен на вели- до сируют стопором 28 относительно корпуса 22
чину уклона стапеля и расположен в продольной вертикальной базовой плоскости V.
Способ реализуется следующим образом.
Секцию 1 подают на стапель и устанавливают в манипулятор (не показан). В контрольных точках секции 1 устанавливают приемники 4-7 (например, типа ПЧД) и соединяют их с блоком индикации 17. Пен- тапризму 24 (фиг. 2) посредством ручного вращения рамки 25 маховиком 26 устанавливают в положение, фиксируемое фиксатором 27, при этом световой пучок 2 располагается в вертикальной базовой плоскости V. Корпус 22 сканатора 19 совместно с подвижным кольцом 30 измерителя 20 поворачивают вручную вокруг оси оптической головки 16 до исходного положения. В этом положении упор 23 корпуса 22 совместится с вертикальной базовой плоскостью V. Фиксируют подвижное кольцо 30 в этом положе
нии фиксатором 31, взаимодействующим с соответствующим отверстием /. В таком положении световой пучок 2, выходящий из оптической головки 16, горизонтален, расположен в вертикальной базовой плоскости V и пап;)авлен в сторону приемников 4 и 5. По пока: .аниям блока индикации 17 определяют величину смещений приемников 4 и 5 от оси светового пучка 2 и при помощи манипулятора (не показан) позиционируют
секцию 1 таким образом, чтобы сигналы рассогласования, вырабатываемые этими приемниками, были равны нулю, обеспечивая тем самым установку секции 1 в стапельное положение по высоте, полущироте и дифференту.
Направляют световой пучок 2 на приемник 6, поворачивая для этой цели скана- тор 19 (фиг. 2) и подвижное кольцо 30 вокруг светового пучка 2 до одного из фиксированных положений, в котором плоскость
сканирования (плоскость, описываемая световым пучком 2, выходящим из пентапризмы 24 при вращении рамки 25) наиболее близка к приемнику 6. Подвижное кольцо 30 и сканатор 19 фиксируют в этом положении фиксаторо.м 31, взаимодействующим с соответствующим отверстием / неподвижного
кольца 29. Затем вращением маховика 26 поворачивают рамку 25 с установленной на ней пентапризмой 24 до положения, в котором световой пучок 2 наиболее близок к приемнику 6. Регистрируют первоначальные показания индикатора линейных перемещений светового пучка 35 и регулировочными винтами 34 арретира 32 перемещают упор 23 корпуса 22, т. е. поворачивают сканатор 19, до совпадения светового пучка 2 с центро.м приемника 6, корректируя при этом также и положение светового пучка 2 в плоскости сканирования посредством вращения рамки 25 и пентапризмы 24. При получении сигнала рассогласования, вырабатываемого приемником 6, равным нулю, рамку 25 фиксируют стопором 28 относительно корпуса 22
и по показаниям индикатора линейных пере- .мещений светового пучка 35 определяют знак и величину отклонения упора 23 от первоначального положения.
Знак отклонения определяют по следую5 щему правилу: если упор 23 при наведении светового пучка 2 на приемник 6 перемещался арретиром 32 в сторону его исходного положения (в сторону вертикальной базовой плоскости У), то отклонение отрицательно, а если в противоположную сторону - поло жительно. .А.рретиром 32 возвращают упор 23 в первоначальное положение, при этом показание индикатора линейных перемещений светового пучка 35 должно быть равным первоначальному.
5 Освобождают фиксатор 31 и поворачивают подвижное кольцо 30 совместно с корпусом 22 сканатора 19 до положения, в котором фиксатор 31 входит в контакт с отверстием
/ неподвижного кольца 29, симметричным относительно вертикальной базовой плоскости отверстию f, используемому при наведении светового пучка 2 на приемник 6. Направляют световой пучок 2 на приемник 7, используя для этой цели арретир 32, и после того, как сигнал рассогласования приемника 7 становится равным нулю по показаниям индикатора линейных перемеш,ений светового пучка 35 определяют знак и величину
в котором должен находиться приемник 7 при стапельном положении секции 1. Манипулятором (не показан) поворачивают секцию 1 вокруг основной линии 3 до совмещения приемника 7 со световым пучком 2, осуществляя тем самым установку секции 1 в стапельное положение по крену.
Для позиционирования высоких днищевых секций или блоков корпуса судна (не показаны) сканатор 19 устанавливают в поотклонения упора 23 от первоначального О ложение, при котором плоскость сканирова- положения.
Определяют величину алгебраической разницы измеренных отклонений и арретиром 32 перемещают упор 23 на половину этой величины в направлении, определяемом правилом знаков, приведенным выще. В результате этого световой пучок 2 поворачивается вокруг основной линии 3 на угол равный половине разности углов между проекциями 12 и 13 и вертикальной базовой плоскостью V, и его ось занимает положение.
15
НИН совместится с вертикальной базовой плоскостью V, в верхней контрольной точке диаметральной плоскости секции устанавливают приемник (не показан) и после установки Секции по высоте, полушироте и дифференту направляют световой пучок 2 вращением пентапризмы 24 на этот приемник. Поворачивают секцию вокруг ее основной линии до совмещения светового пучка 2 с приемником, осуществляя тем самым ее установку в стапельное положение по крену.
в котором должен находиться приемник 7 при стапельном положении секции 1. Манипулятором (не показан) поворачивают секцию 1 вокруг основной линии 3 до совмещения приемника 7 со световым пучком 2, осуществляя тем самым установку секции 1 в стапельное положение по крену.
Для позиционирования высоких днищевых секций или блоков корпуса судна (не показаны) сканатор 19 устанавливают в по ложение, при котором плоскость сканирова-
ложение, при котором плоскость сканирова-
НИН совместится с вертикальной базовой плоскостью V, в верхней контрольной точке диаметральной плоскости секции устанавливают приемник (не показан) и после установки Секции по высоте, полушироте и дифференту направляют световой пучок 2 вращением пентапризмы 24 на этот приемник. Поворачивают секцию вокруг ее основной линии до совмещения светового пучка 2 с приемником, осуществляя тем самым ее установку в стапельное положение по крену.
29,
- ч (TJTi ГПТ,, //// /У///// /УЛ
ге
е d
15
фиг 2
шиг 3
Составитель Н. Круглое
Редактор Н. МарголинаТехред И. ВересКорректор А. Зимокосов
Заказ 4184/18Тираж 422Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4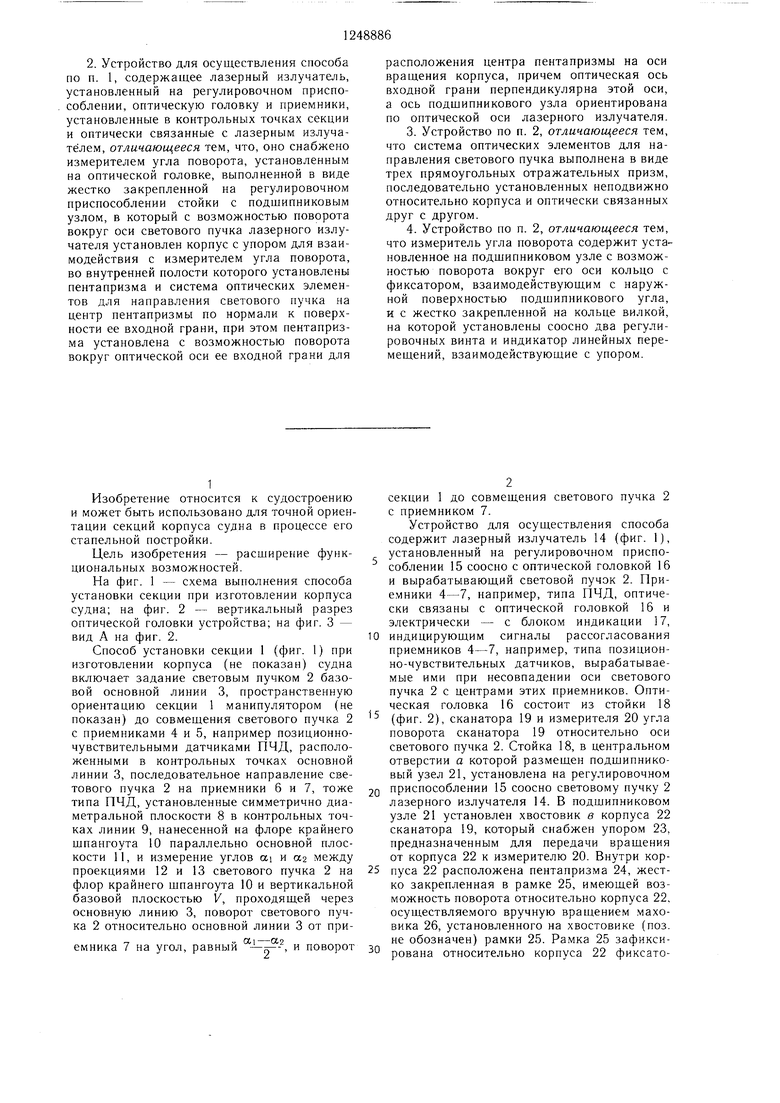


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ задания осевых линий судовых валопроводов | 1982 |
|
SU1039795A1 |
| СПОСОБ РАЗМЕРНОГО КОНТРОЛЯ КРУПНОГАБАРИТНОГО ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2096741C1 |
| Способ установки секций при изготовлении корпуса судна на стапеле | 1987 |
|
SU1497103A1 |
| Стенд для контуровки корпусных конструкций | 1983 |
|
SU1100187A1 |
| Способ установки блока корпусаСудНА HA СТАпЕлЕ (ЕгО ВАРиАНТы) | 1979 |
|
SU800015A1 |
| Устройство для контроля положения в пространстве фиксирующих элементов | 1990 |
|
SU1737266A1 |
| Способ установки блока корпуса судна на стапеле | 1983 |
|
SU1127796A1 |
| Способ установки блоков корпуса судна на стапеле | 1982 |
|
SU1043066A1 |
| Способ контроля действительногопОлОжЕНия плОСКОСТи | 1977 |
|
SU821914A1 |
| СПОСОБ НИВЕЛИРОВАНИЯ, РАЗМЕТКИ И ПРОВЕРКИ КОРПУСА СУДНА | 1992 |
|
RU2094294C1 |
1. Способ установки секции при изготовлении корпуса судна, включающий задание световым пучком базовой линии и пространственную ориентацию секции до совмещения светового пучка с приемниками, расположенными в вертикальной базовой плоскости, проходящей через основную линию секции, отличающийся тем, что, с целью расщирения функциональных возможностей, последовательно направляют световой пучок на дополнительные приемники, которые предварительно устанавливают симметрично диаметральной плоскости в контрольных точках линии, нанесенной на флор крайнего щпангоута параллельно основной плоскости секции, и измеряют углы между проекциями светового пучка на флор и вертикальной базовой плоскостью, затем поворачивают световой пучок относительно основной линии на угол, равный половине разности измеренных углов, и поворачивают секцию вокруг основной линии до совмещения светового пучка с одним из дополнительных приемников. iS (Л 1С 00 СХ) 00 О5 ./
| Способ установки секции при изготовлении корпуса судна | 1982 |
|
SU1047770A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
